
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
121 - 140 / 2,931
運転アシストシステム
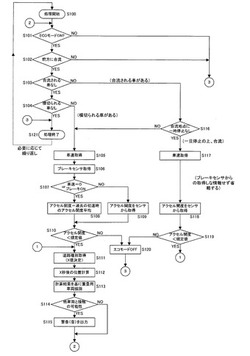
【課題】エコモード設定による加速不足で、交通の流れを悪くしてしまうなどの問題を解消する運転アシストシステムを提供する。
【解決手段】本発明は、エネルギーをセーブして走行するエコモードを備える車両に搭載される運転アシストシステムであって、周辺車両の走行状況を取得する周辺車両走行状況取得手段と、前記車両の外界と重畳させるように画像を表示する表示手段と、前記表示手段に表示する前記車両の予測到達位置を算出する位置算出手段(ステップS112)と、前記周辺車両走行状況取得手段によって取得された前記周辺車両の走行状況と、前記位置算出手段によって算出された前記車両の予測到達位置とから、前記車両が前記周辺車両と接触する可能性があるか否かを判定する判定手段(ステップS114)と、前記判定手段によって前記車両が前記周辺車両と接触する可能性があると判定されたときに警告を行う警告手段(ステップS115)と、を有することを特徴とする。
(もっと読む)
車両用運転支援装置

【課題】交通量の多い走行環境においても、制御対象として不要な車両等を精度良く排除して演算負荷を軽減することができる車両用運転支援装置を提供する。
【解決手段】制御装置10は、車車間通信を通じて検出した他車の中から制御対象となる他車を選定し、地図データ上にマッチングするに際し、制御対象となる他車の選定領域Aを、自車50の道路情報と運転情報とに基づいて可変設定する。これにより、交通量の多い走行環境においても、制御対象として不要な車両等を精度良く排除してマップマッチング等の演算負荷を軽減することができる。
(もっと読む)
通信制御装置、路側通信機及び通信システム
【課題】路側通信機用のタイムスロットで送信する情報の内容に応じた好ましい手段によって情報提供が可能となる通信制御装置を提供することを目的とする。
【解決手段】路側通信機2が無線送信を行う路側用タイムスロットTaが、時分割で割り当てられて通信が行われる。情報分類部23Cは、路側用タイムスロットTaで送信する情報を更新する頻度の高低を判断基準として、当該情報を高頻度更新情報と低頻度更新情報とに分類する。高頻度更新情報と低頻度更新情報とを路側用タイムスロットTa毎の複数のパケットに割り当てて送信させるために、情報割り当て部23Dは、高頻度更新情報を優先してパケットに割り当て、余りの部分に低頻度更新情報を割り当てる。
(もっと読む)
運転支援装置
【課題】自車周辺の障害物と自車との接触のリスクを考慮に入れ、自車が現実的な運転行動を行うことができる支援を行う運転支援装置を提供する。
【解決手段】運転支援装置10のECU20は、自車周辺の状況に対する自車100の規範的な運転行動の候補である少なくとも1以上の規範行動候補について、規範行動候補に係る運転行動により自車100が走行した場合における自車100周辺の障害物と自車100との接触のリスクを予測する。このため、自車100周辺の障害物と自車100との接触のリスクを考慮に入れた規範行動候補を提供することが可能となる。
(もっと読む)
車両用制御装置
【課題】車両用制御装置において、緊急車両が接近している場合に自車両を自動的に減速させるとともに、四輪車の場合にはアクセルペダルの踏み込み、二輪車の場合にはスロットルグリップの回転を制限させて、運転者に操作の違和感をなくすることにある。
【解決手段】制御手段(16)は、車車間通信手段(6)により緊急車両(3)の接近を検出する緊急車両検出手段(17)を備えて、この緊急車両検出手段(17)により緊急車両(3)が自車両(1)に接近することを検出した時に車速検出手段(8)により検出された車速が予め設定された値を超える場合には反力付与手段(11)を作動させて操作力調節手段(13)を調節して予め設定された車速になるように制御する。
(もっと読む)
車両用注意喚起装置
【課題】注意喚起の仕方を工夫することにより、自車両が交差点付近の対象障害物に衝突しないようにする車両用注意喚起装置の提供。
【解決手段】運転者に交差点付近で注意を喚起する車両用注意喚起装置であって、自車両の走行位置を検出する走行位置検出手段と、上記自車両が右折または左折のために交差点に近づいてから右折または左折後に当該交差点を離れるまでの間、運転者に交差点付近への注意を喚起するために運転者に視覚刺激を与える視覚刺激手段と、上記自車両の走行位置に応じて、上記視覚刺激手段の刺激強度を異ならせる刺激制御手段とを備える。
(もっと読む)
走行区分線検出装置
【課題】走行区分線の検出誤差が増大することを防止し、走行区分線を的確に検出する。
【解決手段】走行区分線検出装置10は、車載カメラ11から出力された画像データ(原画像)に対して、車両からの距離に応じた走行路上の走行区分線の所定寸法に相当する大きさを有するカーネルを用いた画素値の畳み込み演算により低コントラスト画像を生成するフィルタ処理部22と、画像データ(原画像)と低コントラスト画像との差分に基づき走行区分線を検知する走行区分線検知部25とを備え、フィルタ処理部22は、注目点設定部21により設定された注目点の位置から第1方向に所定距離だけ変位した位置を中心位置とする第1カーネルを用いて第1低コントラスト画像を生成する第1フィルタ処理部31と、注目点の位置から第2方向に所定距離だけ変位した位置を中心位置とする第2カーネルを用いて第2低コントラスト画像を生成する第2フィルタ処理部32とを備える。
(もっと読む)
移動体表示装置
【課題】移動体の特定の挙動を検出することで、その挙動を示した位置を自動的に記憶することができる移動体表示装置を提供する。
【解決手段】移動体表示装置としてのプロッタ装置は、GPS受信機と、メモリと、CPUと、を備える。GPS受信機は、測位信号を取得して、当該自船の位置を算出する。また、GPS受信機は、測位信号に基づいて、自船の速度又は向きを算出する。メモリは、GPS受信機で算出した前記速度が所定時間内に所定の変化量以上変化したこと、又は、GPS受信機で算出した向きが所定時間内に所定角度以上変化したことを検出した場合に、前記変化が生じた位置を記憶する。CPUは、前記変化が生じた位置に対応するマークをディスプレイに表示するための処理を行う。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置の誤動作を低減する。
【解決手段】GPS装置により測位された現在位置Pcから所定距離D内に、障害物測定波を反射して障害物として誤測定される可能性がある停止物の位置Psが存在するか否を判定する(S8〜S11)。また、車両進行方向に位置する障害物との相対速度V及び障害物までの距離Lに基づいて、障害物に衝突するまでの衝突時間tを演算する(S16〜S18)。そして、現在位置Pcから所定距離D内に停止物の位置Psが存在せず、且つ、衝突時間tが所定閾値t2以下となったときに、ブレーキを自動的に作動させる。このため、予め記憶されている停止物の位置Psの近傍ではブレーキが自動的に作動しないことから、ブレーキの誤作動を低減することができる。
(もっと読む)
車両用情報提示装置
【課題】運転者が情報提示に慣れてしまうことを防止し、情報提示を効果的に行うことができる車両用情報提示装置を提供する。
【解決手段】車両用情報提示装置1は、他者の状態を検知する他者状態センシング部10と、自車の状態を検知する自車状態センシング部20と、他者状態センシング部10および自車状態センシング部20の少なくとも一方からの情報に基づき、運転者に対して提示する提示情報を作成する提示情報作成部30と、提示情報を出力する提示情報出力部40と、を備える。提示情報は、自車状態センシング部20からの情報により自車が駐停車状態と判断された場合に、自車が駐停車状態でない場合とは異なる形態で出力される。
(もっと読む)
車両周辺監視装置
【課題】俯瞰映像上の障害物を強調して表示し、前記俯瞰映像上で歪んで表示される障害物の把握を容易にした車両周辺監視装置を提供すること。
【解決手段】一定の時間間隔ごとに俯瞰映像を取り込み、特徴点抽出処理部3において特徴点Pを抽出する。そして、前記抽出した特徴点Pの動きを特徴点追跡処理部4において追跡処理する。この特徴点Pの追跡処理では、特徴点Pのオプティカルフローを計算することでその動きベクトルを求める。次に、三次元計測処理部5において俯瞰映像上の特徴点Pの位置の変化から自車両と特徴点Pとの相対運動情報と、前記特徴点Pの三次元座標情報を算出する。さらに、前記算出した前記相対運動情報と前記三次元座標情報とから障害物検知処理部6において障害物を検知し、前記検知した障害物を含む前記俯瞰映像上の領域を強調領域描画処理部8において決定し強調し、表示部10により表示出力する。
(もっと読む)
駐車スペース案内システム
【課題】駐車場側に特別な設備を要することなく、車両側における簡単な構成で、立体的な駐車場を含めて精度良く駐車場の空きスペースを案内する技術を提供する。
【解決手段】自車両に近接する他車両の固有のID情報を含む車両情報を取得する車両情報取得部11と、自車両の周辺物体と自車両との距離情報を含む周辺物体の物体情報を取得する物体情報取得部12と、車車間通信を行って駐車場マップを取得する駐車場マップ取得部13と、車両情報と物体情報とを用いて駐車場マップに自車両をマッピングするマッピング部14と、駐車場マップを用いて空きスペースを案内する案内部15と、自車両と周辺物体との相対的な近距離マップを生成する近距離マップ生成部16と、近距離マップを用いて駐車場マップを更新する駐車場マップ更新部18と、更新された駐車場マップを車車間通信により送信する駐車場マップ送信部19とを備える。
(もっと読む)
車両制御装置
【課題】 ドライバに与える違和感の少ない運転支援を実現できる車両制御装置を提供する。
【解決手段】 車両制御用のアクチュエータ(エンジン15、制動制御装置)を備えた車両に搭載され、自車両の進行方向前方の走行環境を計測する走行環境計測部(カメラ1a,1b)と、走行環境計測部による走行環境の計測結果の信頼度(存在信頼度)を判定する信頼度判定部22と、判定された信頼度を必要条件としてアクチュエータの作動を行うコントロールユニット2と、を備えた。
(もっと読む)
自車影認識装置
【課題】 自車影領域を高精度に特定できる自車影認識装置を提供する。
【解決手段】 自車影認識装置11は、自車が走行している路面を含む範囲を撮像する自車周辺撮像装置300と、自車の現在位置の情報と、現在の日時の情報とから太陽の位置を算出する太陽位置算出手段110と、太陽位置算出手段110で得られた太陽の位置情報と、自車の進行方位情報と、自車の立体形状情報とから自車影が発生する領域を推定する自車影領域推定手段120と、自車影領域推定手段120から得られる座標情報に基づき、車両周辺撮像装置300で得られた画像の中から自車影領域を特定する自車影領域検出手段130と、を備えた。
(もっと読む)
群走行制御装置及び群走行制御方法
【課題】処理負荷を抑えつつ群の挙動を乱さないような干渉回避行動を行う。
【解決手段】自車両M0を囲うように設定されて他車両との干渉を少なくとも規定の進行方向変更からなる回避行動で回避可能な干渉回避エリアAR−1を有すると共に、自車両M0の周囲に位置する他車両と車車間通信をしながら群走行を行う群走行制御装置である。上記進行方向変更による回避量は、上記干渉回避エリアAR−1において、自車両M0の側方位置に比較して、自車両M0の前方位置が大きく設定する。自車両M0に対する相対距離が小さな他車両を干渉回避対象として選択する。干渉回避対象が自車両M0の干渉回避エリアAR−1のどの位置に侵入したかを検出する。検出された干渉回避対象の位置、及びその干渉回避対象が位置する干渉回避エリアAR−1内の位置に応じた進行方向変更の回避量に基づき、上記干渉回避対象に対し、自車両M0の回避動作を行わせる。
(もっと読む)
車両用注意喚起装置
【課題】通信により取得した移動物体に関する情報を利用して、より効果的にドライバーに移動物体に対する注意を喚起することが可能な車両用注意喚起装置を提供する。
【解決手段】HMI制御部25は、光ビーコン通信機11、路車間通信機12又は車車間通信機13により得られた情報が、移動物体と自車両100との接触の可能性を示すときは、注意喚起表示53をディスプレイ31に表示させる。HMI制御部25は、注意喚起表示53が表示されているときに、通信で得られた情報から移動物体との接触の可能性が無くなったことが判定されるときは、少なくとも所定時間は、注意喚起表示53より注意喚起の度合の低い注意喚起履歴表示54を表示させる。これにより通信で得られた情報から接触の可能性が無くなったことが判定されても、ドライバーの安全意識の低下を抑制でき、より効果的にドライバーに注意を喚起できる。
(もっと読む)
視差算出方法、および視差算出装置
【課題】連続する類似したパターンを含む物体の距離測定をステレオカメラで実現すること。
【解決手段】ステレオカメラを用いたステレオマッチングにおいて、基準点に対するSADなどの評価値分布において複数の対応点候補が存在した場合、対応点が複数存在すると判定された基準点の評価値分布と、その基準点の周辺領域に存在する別の各基準点の評価値分布とを重畳して、評価値マップを生成する。これにより、対応点が複数存在すると判定された基準点の周辺の実空間における、物体の形状を表現していることになり、評価値マップ上の最も直線の強い線分を抽出することで、一直線上に連続する柵などの正しい距離を算出することが可能となる。
(もっと読む)
車両の操舵支援制御装置
【課題】ドライバ状態に応じて、ドライバに適切に関与しながら進行路を維持するようにドライバを導きつつ制御して操舵支援する。
【解決手段】前方注視距離ztにおける目標通過点PcのX座標xcと推定通過点PeのX座標xeを算出し、これら座標xc、xeの偏差に第1の制御ゲインGlを乗算した演算項と、ヨー角θcaに第2の制御ゲインGyを乗算した演算項とを加算して制御量Tcを算出する。ここで、第1、第2の制御ゲインGl、Gyは、手放し時間Tsoが長いほど、自車両が目標進行路を走行する操舵制御の整定時間が短くなる方向(Gl、Gyが、それぞれ大きな値)に設定される一方、手放し状態が検出されない場合は、覚醒度DAが低い、或いは、漫然度DLが高い場合ほど、自車両が目標進行路を走行する操舵制御の整定時間が短くなる方向(Gl、Gyが、それぞれ大きな値)に設定される。
(もっと読む)
運転支援装置
【課題】車両の運転者が提供された情報に過剰な期待をすることを抑制する。
【解決手段】運転支援装置(10)は、車両(1)に搭載され、路上に設置された路側器(201、202)から所定範囲内で通信可能な第1通信手段(104)と、前記車両とは異なる他の車両に搭載された車載器と通信可能な第2通信手段(104)と、第1通信手段又は第2通信手段により取得された情報を前記車両の運転者に報知可能な報知手段(106、114)と、第1通信手段により情報が取得された時点より前の所定期間内に、第2通信手段により情報が取得されたことを条件に、運転者に対する報知方法を変更するように報知手段を制御する制御手段(109)とを備える。
(もっと読む)
車両用運転特性検出装置、車両用運転特性検出方法および自動車
【課題】運転者の特性をより高精度に検出すること。
【解決手段】自動車1Aは、車両用運転特性検出装置1を備え、車両走行状態の分布を取得する。そして、取得した分布について複数の統計指標を算出し、これらの組み合わせを基に、車両走行状態の分布に歪みがあるか否かを判定する。自動車1Aは、車両走行状態の分布に歪みがあると判定した場合、その分布を基に、運転者の限界値を検出する。このとき検出した運転者の限界値は、そのときの走行状況において、運転者が積極的な運転操作を行い、適正であると考える範囲からの逸脱を回避したことに依拠した値である。したがって、運転者の特性をより高精度に検出することができる。
(もっと読む)
121 - 140 / 2,931
[ Back to top ]