
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
61 - 80 / 2,931
衝突予測装置
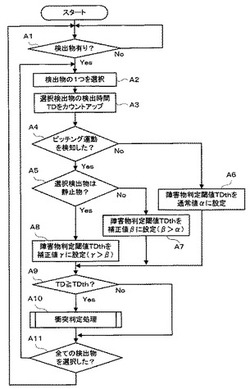
【課題】従来に比して衝突の誤判定を低減した衝突予測装置を提供する。
【解決手段】車両に搭載され、当該車両と障害物との衝突を予測する衝突予測装置であって、車両の周囲に電磁波を送信し、物体から反射された当該電磁波の反射波を受信することによって当該物体を検出する物体検出手段と、物体検出手段によって検出された物体が車両に衝突する可能性のある障害物であるか否か判定する障害物判定手段と、物体が障害物であると判定された場合、車両と当該障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、車両の車体が上下方向に振動しているか否かを判定する振動判定手段と、車両の車体が上下方向に振動していると判定された場合、衝突判定手段による衝突の危険性が高いとする判定を車両の車体が上下方向に振動していないと判定された場合に比べて抑制する判定抑制手段とを備える、衝突予測装置である。
(もっと読む)
車両の報知装置

【課題】カーナビゲーションシステムを搭載していない車両であっても方向指示器の出し忘れを予防することができる車両の報知装置を提供する。
【解決手段】車両の方向指示器の作動を検出する作動検出手段11と、車両の速度を検出する車速検出手段12と、車両のステアリングの操舵角を検出する操舵角検出手段13と、少なくとも速度検出手段12及び操舵角検出手段13の検出結果に基づいて車両の走行状態を判別すると共にその判別結果と作動検出手段11による検出結果とに基づいて方向指示器が車両の走行状態に応じて適切に作動しているか否かの判定を行う適切作動判定手段21と、適切作動判定手段21によって方向指示器が車両の走行状態に適切に作動していないと判定された場合に、運転者に対して方向指示器の適切な作動を促す報知を行う報知手段22と、を備える構成とする。
(もっと読む)
安全運転サポート装置
【課題】ドライバの種類に応じた安全運転を簡易、正確、且つ十分にサポートすることが
できる安全運転サポート装置を提供すること。
【解決手段】安全運転サポート装置1は、1日の時刻毎の眠気度のパターンをドライバの
長期間にわたる勤務時間帯別に区分して設定しているので、現ドライバに合致したエンジ
ンスタート時や走行時における眠気度を判別することができ、該眠気度の判別結果に該当
する的確な安全サポートを実行することができる。よって、運転前や運転中において安全
サポートに応じた行動を現ドライバにとらせることが可能となり、安全運転を簡易、正確
、且つ十分にサポートすることができる。
(もっと読む)
運転支援装置
【課題】自車両の前方を走行する車両の挙動に応じて車間距離を自動的に延長できる機能性を向上させた運転支援装置を提供すること。
【解決手段】自車両が交差点に近づくと、交差点位置判断部11は先行車両の速度と加速度とをレーダ装置1により検出する。さらに先行車両と先先行車両との間の車間距離に応じた補正係数を読み出す。また交差点から自車両までの距離を算出し、先行車両の速度、交差点から自車両までの距離、先行車両の加速度をもとに延長車間距離特性データを参照し、自車両が交差点に接近したときの延長車間距離を読み出し補正係数により補正する。この結果、補正された延長車間距離は先行車両の加速度、先行車両と先先行車両との間の車間距離、交差点からの距離などの先行車両、先先行車両の挙動に応じて延長されたものとなる。
(もっと読む)
運転シーン判定装置、運転シーン判定方法およびプログラム、ならびに、ワークロード推定装置、ワークロード推定方法およびプログラム
【課題】 運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることのできる運転シーン判定装置を提供する。
【解決手段】 運転シーン判定装置1は、車両情報と道路情報に運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーンDB11と、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶する遷移可否DB12と、運転シーン対応情報および遷移可否情報に基づいて現在の車両情報および現在の道路情報から現在の運転シーンを判定する運転シーン判定部10を備えている。この運転シーン判定部10は、現在の車両情報および現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、現在の運転シーンであると判定する。
(もっと読む)
車両の自動ブレーキ制御装置
【課題】本発明は、交差点内或いは交差点付近において誤作動を低減することのできる車両の自動ブレーキ制御装置を提供する。
【解決手段】ミリ波レーダで検出された障害物の位置情報及びGPSで検出された自車の位置情報から障害物位置判定部にて障害物の位置が交差点内或いは交差点付近であるか否かを判定し(S16〜S22)、判定結果をブレーキ制御部へ供給し、ブレーキ制御部では、障害物が静止物である場合には静止物用ブレーキ制御、障害物が移動物で且つ自車或いは障害物の位置が交差点内或いは交差点付近である場合には静止物用ブレーキ制御を行い(S26)、障害物が移動物で且つ自車或いは障害物の位置が前述以外の場合には移動物用ブレーキ制御を行い(S28)、警告灯、スピーカ及びブレーキ装置の作動タイミングを制御する。
(もっと読む)
物体検出装置および物体検出方法
【課題】画像における検出対象の検出の精度を向上させることを課題とする。
【解決手段】画像センサー31によって撮像された画像情報に含まれる検出対象を検出する物体検出装置1に、画像情報に含まれる特徴点毎の実際のオプティカルフローを取得するオプティカルフロー取得部27と、ミリ波レーダー32によって測定された、ミリ波レーダー32と検出対象との間の距離および相対速度に係る情報を取得する距離・速度取得部21と、検出対象が画像センサー31によって撮像されたと仮定した場合のオプティカルフローの理論値を、距離および相対速度に係る情報に基づいて算出する理論値算出部26と、特徴点毎の実際のオプティカルフローと理論値とを比較し、実際のオプティカルフローが理論値に一致または近似する特徴点を、端点候補として抽出する検出対象抽出部28と、を備えた。
(もっと読む)
走行制御システム、制御プログラム、記録媒体
【課題】先行車両への追突を回避可能である安全な走行制御と、自車両に急激な速度変化が生じることのない乗り心地の良好な走行制御とを両立して実現できる走行制御システムを提供する。
【解決手段】走行制御システムは、自車両が現時刻の先行車両の位置に到達するまでの到達時間を分割することで複数の予測区間を設定して(ステップS105)、到達時間の経過時点における自車両の目標加速度を各予測区間毎に算出する(ステップS107)。そして、各予測区間における自車両の予測加速度や、連続する2つの予測区間における操作変化量を入力値とする評価関数を作成して(ステップS108)、評価関数の出力値が最小となる入力値を求める一般化予測制御に基づき、各予測区間における自車両の加速度を取得して(ステップS109)、取得値に現時刻以降の自車両の加速度を制御する(ステップS110)。
(もっと読む)
交差点衝突防止警告装置
【課題】十字路、Y字路及びT字路等の種々の形態の交差点の路面中央に埋め込んで、一式の検知用センサによって交差点への全進入路における車両や歩行者の進入及び位置を検知し、交差点に進入する夫々の車両や歩行者に対して他の進入路における車両や歩行者の進入及び位置情報を発信することが可能な交差点衝突防止警告装置を提供することにある。
【解決手段】本体2に回転自在に設けられた回転台4に取り付けられ該回転台4の回転により交差点の全進入路に対して車両や歩行者を検出する1つの検出用センサ7と、回転台4に取り付けられ反射部と非反射部が回転台の周方向に交互に周期的に設けられた光学スケール9と本体2に設けられた回転角検出器10とにより構成されて回転台4の回転量を検出するエンコーダと、本体2に設けられ交差点に進入する車両や歩行者の存在を警告する警告灯3を備えるようにした。
(もっと読む)
停止線認識装置
【課題】過大な演算負荷を発生させることなく、自車両の制御に必要な停止線を精度良く認識することができる停止線認識装置を提供する。
【解決手段】画像処理ユニット4は、自車走行路前方の信号機の認識を行い、自車走行路上の直前の信号機が設定距離L2以内の位置に存在し且つその信号機が赤信号であることを認識したとき、停止線認識モードへと移行して停止線の認識処理を実行する。これにより、不要な場面での停止線認識処理の実行を的確に排除することができる。従って、過大な演算負荷を発生させることなく、自車両1の制御に必要な停止線を精度良く認識することができる。
(もっと読む)
運転支援装置、運転支援方法及びコンピュータプログラム
【課題】車線毎の規制の内容が不規則或いは頻繁に変動する道路区間においても、車両が現在走行する車線から他の車線へと進入する場合に、車線毎の規制の内容に応じて警告することが可能な運転支援装置、運転支援方法及びコンピュータプログラムを提供する。
【解決手段】車両の周囲の道路上に設置された車線区分構造物を検出し(S3)、検出された車線区分構造物が車両の進入可能な間隔を隔てて連続して設置されている場合に、該間隔を形成する各車線区分構造物の座標に基づいて、各車線区分構造物の間を結ぶ仮想線を設定するとともに(S7)、設定された仮想線を自車両が越えると判定された場合に警告を行う(S11)ように構成する。
(もっと読む)
車両前方監視装置
【課題】車両前方の監視体制の継続性、連続性を維持することが可能な車両前方監視装置を提供する。
【解決手段】車両前方監視装置は、狭角カメラ、広角カメラ、物体相対距離Dfwに応じて狭角画像情報Dn及び広角画像情報Dwの何れか一方を処理用画像情報として選択する画像情報選択部、処理用画像情報を用いて画像処理を行い自車両前方に存在する前方物体を検出する画像処理部、自車両の進行予定方向Dcpに対する狭画角中心線方向Dclのずれを検知する方向ずれ検知部を備える。画像情報選択部は、方向ずれ検知部により進行予定方向Dcp及び狭画角中心線方向Dclのずれが検知された場合、物体相対距離Dfwに応じて選択すべき処理用画像情報が狭角画像情報Dnである場合においても広角画像情報Dwを選択する。
(もっと読む)
運転支援装置
【課題】右折事故防止運転支援等の運転支援を適切に実施する。
【解決手段】運転支援装置は、対向車線820における交差点の手前に設定された検知エリアA1における対向車両の存在状況を示す検知エリア内情報及び交差点に設置された信号機400の信号サイクル情報を路側送信機220から受信する受信手段と、対向車線における検知エリアよりも交差点側に停止している対向車両である検知エリア外車両が存在するか否かを、検知エリア内情報及び信号サイクル情報に基づいて判定する判定手段と、判定手段によって検知エリア外車両が存在すると判定された場合には、自車両が交差点に進入する際に運転支援を所定時間継続して実施する実施手段とを備える。
(もっと読む)
安全運転診断装置
【課題】交差点において安全確認をしていないにもかかわらず安全確認をしたと誤判定すること、及び安全確認をしたにもかかわらず安全確認をしていないと誤判定することを低減することができる安全運転診断装置を提供すること。
【解決手段】自車両Cが交差点の進入位置から2[m]より長く進入した時点以前の5[s]間の水平角信号をサンプリングする(S10〜S16)。また、その5[s]前の前後における水平角の平均の絶対値を算出して、その絶対値が所定値以上である場合は、サンプリング部13aにてサンプリングした水平角信号を加工する(S17、S18)。そして、サンプリングした水平角信号からパワースペクトルを計算すると共に、0.2〜1.5Hzにおけるパワーの極大値の総和を計算して、この総和と判定値を比較して、ドライバによる安全確認がなされたか否かを判定する(S19〜21)。
(もっと読む)
車両前方監視装置
【課題】車両のフロントガラスを払拭するワイパーの払拭動作に伴い、前方物体が未検出となる頻度を低減可能な車両前方監視装置を提供する。
【解決手段】車両前方監視装置は、狭角カメラと、広角カメラと、狭角画像情報Dn及び広角画像情報Dwの何れか一方を用いて画像処理を行い前方物体を検出する物体検出部と、物体相対距離Dfwに応じて狭角画像情報Dn及び広角画像情報Dwの何れか一方を物体検出部が用いる画像情報として選択する画像情報選択部と、処理用カメラの視野内にワイパーが含まれているか否かを判別するワイパー取り込み判別部とを備える。物体検出部は、ワイパー取り込み判別部が処理用カメラの視野内にワイパーが含まれていると判別している場合、非選択画像情報を用いて前方物体を検出する。
(もっと読む)
方向転換支援装置及び方法
【課題】車両の方向転換が可能か否かを運転者が精度良く判断可能なように支援する技術を提供する。
【解決手段】自車両の周囲を撮影した画像を取得し、前記画像を変換して俯瞰画像を生成し、自車両が最小回転半径で走行した場合の最小軌道を求め、自車の舵角を検出した舵角情報を取得し、前記舵角情報が示す舵角で自車が走行した場合の予想軌道を求め、前記最小軌道と前記予想軌道を前記俯瞰画像情報と重畳して表示装置に表示させる。
(もっと読む)
車両用走行案内装置、車両用走行案内方法及びコンピュータプログラム
【課題】案内情報を適切に案内対象地点に重畳させて表示することが可能となるとともに運転者に案内情報を視認させ易く表示することを可能とした車両用走行案内装置、車両用走行案内方法及びコンピュータプログラムを提供する。
【解決手段】ナビゲーション装置1に係る案内情報をHUD50により表示する場合に、車両に関する車両情報と車両の周辺環境をそれぞれ取得し、取得した車両情報と車両周辺環境とに基づいて、車両に所定値以上の制動力が継続的に発生することが予測される区間を、車両姿勢が基準姿勢に対して変位している状態が継続することが予測される区間として補正対象区間に設定し、設定された補正対象区間を車両が走行する間において、案内情報を表示する表示位置を、車両の制動力の発生に基づく車両姿勢の変位を考慮して補正するように構成する。
(もっと読む)
電気自動車
【課題】 前方車両が後退して自車両に接近してくるような場合に衝突を回避することができる電気自動車を提供する。
【解決手段】 自車両の停止状態が検出され、かつ前方障害物との距離LFRが第1所定距離L1以下で、かつ後方障害物との距離LRRが第2所定距離L2以上であり、かつステアリングホイールの操舵角θSTRの絶対値が所定舵角θS以下であるときに、自車両を低速で後退させるように制御する。前方車両が後退して自車両に接近してくるような場合に、運転者の意図しない方向へ自車両が後退することなく、後方障害物との衝突を回避しつつ前方車両との衝突を確実に回避することができる。
(もっと読む)
車両の衝突を回避するための装置
【課題】交差点の見通し範囲を把握し、的確なタイミングで他車両との衝突回避動作を発動する。
【解決手段】車両の周辺の障害物の位置に基づいて、車両から前方を見通せる見通し範囲を算出する。見通し範囲外から車両に向けて接近してくる移動物体と衝突することなく、交差点を該車両が通過することが可能な通過可能速度VTを、見通し範囲に基づいて算出する。通過可能速度VTよりも車両の現在の速度VNが小さいとき、衝突回避のための制御を発動する。また、車両が交差点に進入するまでに停止可能な最大速度VSを算出し、車両の現在の速度VNが該停止可能速度VSより小さいときには、該現在の速度が通過可能速度VTより小さくても、衝突回避のための制御の発動を抑制する。見通し範囲の大きさに応じた通過可能速度VTを算出するので、見通し範囲に応じて運転者が取り得る速度を考慮しつつ、衝突回避の制御を適切なタイミングで発動させる。
(もっと読む)
衝突防止装置、衝突防止方法、衝突防止プログラム、および衝突防止システム
【課題】通信範囲内に多数の車両が存在しても円滑な通信を行うことができる衝突防止装置、衝突防止方法、衝突防止プログラム、および衝突防止システムの提供。
【解決手段】車両が所定の範囲に進入した場合に車両の走行状況を示す走行情報を受信し、または車両が他車両と衝突の可能性がある旨の判定結果を所定の範囲に進入した他車両に送信する路側通信部と、交差点情報と、車両が交差点に進入した場合に車両同士が衝突の可能性を判定する衝突可能性判定条件とを記憶する路側記憶部と、路側通信部が車両から走行情報を受信した場合に、受信した走行情報と、道路情報と、交差点情報とに基づいて車両が進入した交差点を特定し、受信した走行情報と衝突可能性判定条件とに基づいて、特定した交差点において車両が他車両と衝突の可能性があるか否かを判定し、車両が他車両と衝突の可能性があると判定した場合にのみ判定結果を出力する衝突可能性判定部とを備える。
(もっと読む)
61 - 80 / 2,931
[ Back to top ]