
Fターム[5H303MM05]の内容
位置、方向の制御 (6,897) | 制御部、演算部の出力信号の種類 (175) | 連続信号であるもの (131)
Fターム[5H303MM05]に分類される特許
1 - 20 / 131
ギア加工機の制御装置
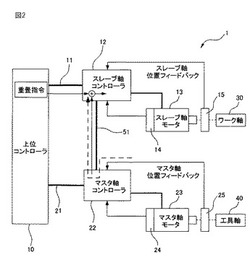
【課題】伝達遅れを抑え且つ分岐回路無しで、一つのマスタ軸に対して一つまたは複数のスレーブ軸を同期させる。
【解決手段】ギア加工機の制御装置(1)は、工具軸コントローラ(22)とワーク軸コントローラ(12)との間を直接的に接続して通信するバス(51)を具備し、工具軸位置検出センサ(25)により検出された工具軸(40)の位置はバスを通じてワーク軸コントローラに供給され、上位コントローラ(10)は所定の同期比と、ねじれ動作を加えるための重畳指令とをワーク軸コントローラに供給するようになっており、ワーク軸コントローラは、バスを通じて供給された工具軸の位置に同期比を乗算して作成された値と重畳指令とを加算して、ワーク軸(30)の移動指令を作成するようにした。
(もっと読む)
不感帯処理部を備えた電動機の制御装置

【課題】被駆動体を電動機によって同一動作パターンの繰り返し制御を行う場合において、被駆動体を停止させるために電動機の位置指令をゼロにしたときに発生し得る被駆動体の振動を抑制することができる電動機の制御装置を実現する。
【解決手段】電動機Mの制御装置1は、被駆動体2の位置を検出する位置検出部11と、電動機Mに与えられる位置指令と位置検出部11で検出した被駆動体2の位置との位置偏差をサンプリング周期毎に取得する位置偏差取得部12と、位置偏差取得部12により取得した位置偏差が所定の不感帯範囲内に含まれる場合は当該位置偏差をゼロに置き換えて出力する不感帯処理部13と、不感帯処理部13から出力された位置偏差がゼロになるような補正量を算出する繰り返し制御部14とを備え、位置偏差取得部12により取得した位置偏差と繰り返し制御部14により算出された補正量とに基づいて、電動機Mを制御する。
(もっと読む)
ステージ移動装置及び無接点充電器
【課題】可及的に安価で、モータ制御が簡単なステージ移動装置を提供する。
【解決手段】ステージ移動装置1を、1個の正・逆回転可能なモータ100と、互いに直角に交差して配置され、交差部分にステージ600を保持するX軸方向キャリッジ400X及びX軸方向キャリッジ400Xと、モータ100の回転力をX軸方向キャリッジ400XをX軸方向に移動させる経路に伝達するか、Y軸方向キャリッジ400YをY軸方向に移動させる経路に伝達するかをステージ600の移動目標に応じて切り替える動力伝達経路切替手段と、モータ100の回転軸の回転運動をX軸方向キャリッジ400Xの直線往復運動又はY軸方向キャリッジ400Yの直線往復運動に変換する運動方向変換手段と、X軸方向キャリッジ案内手段及びY軸方向キャリッジ案内手段と、ステージ600の移動目標に応じてモータ100の回転方向及び回転角度を制御するモータ制御装置とで構成した。
(もっと読む)
一つの被駆動体を二つの電動機で駆動させる制御装置
【課題】二つの電動機間の機動力が互いに干渉することによって生じうる振動を抑制するために、二つのプロセッサで二つの電動機を制御することができる制御装置を提供する。
【解決手段】DSP11aは、取得した回転サーボモータ3aの速度値をDSP11bに送信するとともに回転サーボモータ3bの速度値をDSP11bから受信し、回転サーボモータ3aへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。DSP11bは、取得した回転サーボモータ3bの速度値をDSP11aに送信するとともに回転サーボモータ3aの速度値をDSP11aから受信し、回転サーボモータ3bへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。
(もっと読む)
ステージ装置およびこれを用いた観察装置
【課題】観察サンプルを載置する可動テーブルをウォーキング形ピエゾモータにより駆動するピエゾステージと、前記ピエゾステージの移動を制御するステージ制御装置を有するステージ装置において、ピエゾステージの周期的な速度変動を抑制して、観察者がサンプルの移動を行う際の操作性と位置決め精度を向上する。
【解決手段】ピエゾステージ1のウォーキング形ピエゾモータ102を駆動する指令電圧標準データ304と、前記ウォーキング形ピエゾモータ102の出力に一定速度を与える様に予め測定した指令電圧出力タイミング補正データ305と、少なくとも前記指令電圧標準データ304および前記指令電圧出力タイミング補正データ305から前記ウォーキング形ピエゾモータ102を駆動する指令電圧を生成する指令電圧生成部302を有するステージ装置3が提供される。
(もっと読む)
位置補正装置およびレーザ加工機
【課題】移動装置の位置決め制御の精度の向上と加工速度の向上とを両立できる位置決め装置およびレーザ加工機を提供すること。
【解決手段】座標平面におけるレーザビームBの加工予定軌跡と目標軌跡との間で距離の最も近い2点の組が探索され、その2点間の各々の距離が算出される。算出された各々の距離に基づいて加工予定軌跡を作るための指令が補正されるので、加工予定軌跡を目標軌跡に近づけることができる。これらの処理は被加工物WにレーザビームBを照射する前に実行されるので、レーザ加工時における移動装置の位置決め速度(移動速度)を低下させることなく移動装置の位置決め制御の精度を向上できる。また、変位にヒステリシスをもつピエゾアクチュエータ等の移動装置であっても、ヒステリシスを考慮した補正ができる。
(もっと読む)
位置決め装置、露光装置およびデバイス製造方法
【課題】位置決め精度の向上に有利な技術を提供する。
【解決手段】位置決め装置は、ステージと、ベースと、前記ステージと前記ベースとの間に配置されていて、ばね性を有する支持部で前記ステージを支持する支持機構と、前記ステージを駆動するように前記ステージと前記ベースとの間に配置されたアクチュエータと、前記アクチュエータを制御する制御部とを備える。前記制御部は、目標位置に対する前記ステージの位置偏差と、前記ステージと前記ベースとの相対位置の変動量とに基づいて、前記位置偏差が低減され、かつ、前記支持部の前記ばね性によって前記ステージに作用する力の少なくとも一部が打ち消されるように前記アクチュエータを制御する。
(もっと読む)
線形運動デバイスの制御装置
【課題】検出磁場と線形運動デバイスの位置とにずれがある場合でも、線形運動デバイスを正確に位置決めすることができる線形運動デバイスの制御装置を提供する。
【解決手段】デバイス11の磁石19が発生する磁場を検出し、検出された磁場の値に応答する出力信号VMOを出力する磁場センサ113、制御信号VCM[2:0]と出力信号VMOの振幅とを関連付けた電圧指令信号VCOを生成する電圧信号生成回路114、出力信号VMOと電圧指令信号VCOとの偏差を増幅して出力信号VEOを生成する差動増幅器115、出力信号VEOの値に応じて線形運動デバイス11を駆動する出力ドライバ112と、出力信号VEOを、磁場センサ113から出力される出力信号VMOの振幅に応じて補正し、出力ドライバ112への入力信号を生成するゲイン補正回路116によって制御装置を構成する。
(もっと読む)
指令生成装置
【課題】基準軸の位置に同期させたセンサフィードバック制御を可能にするモータ駆動制御システムを実現するための指令生成装置を得る。
【解決手段】機械装置の状態をセンサ5で検出して機械装置を駆動するモータ4をセンサフィードバック制御するモータ制御装置3に対して、基準軸の位置とセンサフィードバック制御の指令値の対応関係を示す指令プロファイルに基づいて、基準軸の位置に対応したセンサフィードバック制御の指令値の詳細を演算して出力する。
(もっと読む)
指令生成装置
【課題】目標位置が変更された場合であっても、可動軸に発生する衝撃や励起する振動を可及的に抑制しながら前記変更された目標位置までの補間動作を実行すること。
【解決手段】目標位置Xと可動軸の現在位置Cとの間を補間するように速度指令計算値vrを可動軸毎に算出する指令速度演算部と、直前に出力された速度指令出力値voと速度指令計算値vrとの差分である速度変更量Δvを可動軸毎に算出する速度変更量演算部と、可動軸毎の速度変更量Δvの全てが許容速度変更量Vmを越えない値となるように速度変更量Δvを制限する1つの補正ゲインRを算出する補正ゲイン演算部と、速度変更量Δvを補正ゲインRで制限した値と直前に出力された速度指令出力値voとを加算して次に出力する速度指令出力値voを可動軸毎に算出する指令速度出力部を備える。
(もっと読む)
弁開度制御システム
【課題】開又は閉指令を、開度に対応した時間、出力することで、弁を目標開度に操作する場合、目標開度近くで開/閉方向の反転動作を頻繁に繰り返すことなく、目標開度とすることが可能な弁開度制御システムを提供する
【解決手段】弁11を所望の開度に開閉制御する弁開度制御システムであって、弁11の開閉速度に基づき、設定された所望の目標開度に達するまでの開又は閉指令の出力時間を出力時間演算手段17で求め、 この出力時間の間、出力手段と18により弁11に開又は閉指令を出力する。この際、弁11の実測開度を開度制御手段19に入力し、この実測開度と目標開度との差が、予め設定した不感帯の範囲に入ると、弁11に対する開又は閉指令の出力を停止させる。
(もっと読む)
ピッチ駆動装置
【課題】ピッチ駆動による装着ヘッド等の可動体の振動を低減する機能を、ピッチ駆動の高速化とコントローラの演算負荷軽減の要求を満たしながら実現する。
【解決手段】部品実装機の装着ヘッド22に、複数本の吸着ノズル21を所定ピッチで配列し、部品吸着動作時や部品実装動作時に、装着ヘッド22を回転方向に吸着ノズル21の配列ピッチ分だけピッチ駆動する。ピッチ駆動の速度指令プロファイルとして、速度上昇を性能限界より低い速度で制限した台形波状の速度指令プロファイルを用いて装着ヘッド22をピッチ駆動することで、ピッチ駆動による装着ヘッド22のX軸方向の振動エネルギを減衰させる。振動エネルギを減衰させる周波数帯は、台形波状の速度指令プロファイルの最高速度指令によって変化させることができ、減衰させる周波数が装着ヘッド22の支持部分の固有振動数と一致するように最高速度指令を設定すれば良い。
(もっと読む)
位置制御装置
【課題】簡素な構成で可動部材の位置を高精度に検出するとともに、高精度に停止位置の制御ができる位置制御装置を提供する。
【解決手段】直流電気モータ39〜42と、電気モータによって可動部材を移動させる移動手段2と、ブラシとコミュテータとの間の断続によって電気モータへの供給電流に発生するリップル成分を抽出してパルス化したリップルパルスを出力するパルス検出部38と、可動部材が移動されるときの現在位置を示す現在位置情報をリップルパルスに基づいて演算し記憶する現在位置情報記憶部44と、電気モータ39〜42に供給される電流が0となる前に可動部材が停止するように電流を低下させる電流制御装置45と、を備える。
(もっと読む)
露光装置及びデバイス製造方法
【課題】 パターンの重ね合わせ精度の低下及び露光量の均一性の低下を抑制した走査露光装置を提供する。
【解決手段】 原版9と基板8とを走査しながら前記基板の複数のショット領域を露光する走査露光装置は、前記基板を保持して移動するステージ10と、前記ステージの移動を規定する駆動プロファイルに基づいて前記ステージの移動を制御する制御部15と、を備える。前記駆動プロファイルのうち少なくとも1つのショット領域の露光中の前記ステージの移動を規定する部分は、前記ステージの制御系における共振周波数よりも低い周波数の正弦波から構成されている。
(もっと読む)
アクチュエータ用駆動制御装置及びアクチュエータの駆動制御方法
【課題】アクチュエータが備える変位部材の移動距離及び移動時間を設定するだけで、変位部材の詳細な動作を決定し、該変位部材を精度よく変位させる。
【解決手段】アクチュエータ用駆動制御装置10は、変位部材16の移動距離を設定する移動距離領域30と、移動時間を設定する移動時間領域32と、移動距離及び移動時間に基づいて任意のタイミングにおける変位部材16の変位量又は変位速度の目標値を演算する目標値演算部40と、変位部材16の変位量又は変位速度の目標値に基づいて駆動電力Pを生成して、該駆動電力Pをアクチュエータ12に送る駆動制御部26と、を備える。
(もっと読む)
目標追跡装置及び目標追跡方法
【課題】外乱の影響によって、撮像器の指向方向にずれが発生することを抑制する。
【解決手段】実施形態によれば、撮像部11にて撮像視野内の目標に関する画像情報を得て、この画像情報を画像処理部にて画像処理することで撮像部の指向方向と目標の方向との差異となる目標方向情報を得て、駆動部12、14にて目標方向情報及び当該駆動部の駆動に関するセンサ情報に基づいて撮像部11の視軸方向を目標の方向に指向させて追跡する目標追跡装置において、センサ情報に基づいて、駆動部自体に内在する外乱の量を算出する外乱量演算手段143と、この外乱量演算手段で得られた外乱の量に基づいて、当該外乱が印加された場合に発生する撮像部の指向方向のずれ量を算出するずれ量算出手段144と、画像処理部から出力される目標方向情報をずれ量で補正する補正手段とを備えた目標追跡装置を提供する。
(もっと読む)
加工を高精度化するサーボ制御システム
【課題】角度同期方式の長所を生かしつつ、基準角度が与えられない場合でも角度同期方式の学習制御の適用を可能にするサーボ制御システムの提供。
【解決手段】サーボ制御システム10は、各軸を駆動するX軸サーボモータ12、Y軸サーボモータ14及びZ軸サーボモータ16をそれぞれ制御するX軸サーボ制御装置18、Y軸サーボ制御装置20及びZ軸サーボ制御装置22を有する。またX軸サーボ制御装置18及びY軸サーボ制御装置20は、上位制御装置24から送られる各軸指令に基づいて、単調増加又は一方向に変化する基準信号θを作成する基準信号生成部28及び32をそれぞれ有し、学習制御器26及び30は該基準信号に基づいて学習制御を行う。
(もっと読む)
産業機械
【課題】 制御装置の機種の増加を抑えることができてコスト増を防止できる産業機械を提供する。
【解決手段】 三次元測定機1は、複数の軸方向へ制御対象物を移動させる移動機構2と、移動機構2に接続されて移動機構2を各軸方向に制御する各軸の制御信号を送受信する第1ポート321と第2ポート322と第3ポート323とを有し、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、各軸の制御信号を生成する制御信号生成部324と、各ポート321〜323で送受信する各軸の制御信号をそれぞれ設定させる設定部325とを備える。
(もっと読む)
位置決め制御装置
【課題】 上位コントローラと、該上位コントローラからの起動信号に基づいて被搬送物を搬送するサーボモータと、該サーボモータを可変速駆動するサーボアンプとを用いて形成される位置決め制御装置の省配線を図る。
【解決手段】 フィルム1をローラ2で一定量だけ定寸送りしつつ、カッター4で裁断するときに、ローラ2を駆動するサーボモータ11を可変速制御するサーボアンプ40を位置指令生成部41、移動量メモリ部42、位置・速度・電流制御部43、位置ラッチ部44、状態監視フラグ部45、位置決め完了判定部46で形成することにより、フィルム1上に印刷されたマーク1a,1b,・・・をその都度通過したタイミングで発生する信号がオンされると状態監視フラグ部45の状態監視フラグをセットし、この状態監視フラグの状態を上位コントローラ31に出力する。
(もっと読む)
同期制御装置
【課題】 複数のモータで同一方向の座標軸を駆動する機械に対して、汎用的な電機品を用いて各軸間相互に加わる無効反力を抑制すると共に、作業位置に対する同期制御を高精度に行なう同期制御装置を提供する。
【解決手段】 位置指令121を生成する位置指令生成部21と、2台の位置情報131,141に基づいてXY軸座標系である作業位置122を演算し、位置指令121と作業位置の一方の軸座標系位置122との差に基づいて新たな位置指令125を演算する第1の位置制御系を有する指令装置2と、新たな位置指令125と位置情報131,141との差に基づいてモータを駆動する指令を演算する第2の位置制御系をそれぞれ有する2台のモータ制御装置3,4と、を備える。
(もっと読む)
1 - 20 / 131
[ Back to top ]