
Fターム[5H501LL01]の内容
Fターム[5H501LL01]の下位に属するFターム
アナログ値で検出するもの (71)
デジタル値で検出するもの (383)
センサレスで検出するもの (103)
Fターム[5H501LL01]に分類される特許
61 - 80 / 402
共振抑制装置及び共振抑制方法
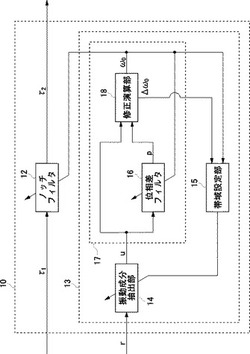
【課題】ノッチフィルタの中心周波数を良好に調整する。
【解決手段】共振抑制装置は、制御系の共振を抑制するために当該制御系に設けられているノッチフィルタ12と、ノッチフィルタ12の中心周波数を更新する中心周波数演算部17と、中心周波数演算部17への入力信号の帯域を制限するための振動成分抽出部14であって、その通過帯域が中心周波数に連動して設定される第1のフィルタを含む振動成分抽出部14と、を備える。通過帯域は中心周波数の修正量が基準を下回る場合に中心周波数に連動して設定されてもよい。
(もっと読む)
モータ駆動回路

【課題】モータを低速で起動可能としつつもソフトスタート機能を担保する。
【解決手段】
一方の論理レベルのデューティー比が第1デューティー比の第1パルス信号を生成するパルス生成回路と、モータの回転に応じた回転信号に基づいて、モータが停止している状態から回転を開始する際は第1デューティー比で駆動電流をモータコイルに供給し、モータが回転を開始した後は、モータの目標回転速度に応じて一方の論理レベルの第2デューティー比が高くなる第2パルス信号の第2デューティー比で駆動電流をモータコイルに供給する駆動制御回路と、を備え、パルス生成回路は、第2デューティー比と異なる第1デューティー比の第1パルス信号を生成すること、を特徴とする。
(もっと読む)
モータ駆動装置及び画像形成装置
【課題】モータの負荷のばらつきに関わりなく、モータを速やかに起動させることができるモータ駆動装置を提供する。
【解決手段】モータの回転速度を制御するモータ駆動装置は、モータ105の回転速度を検出する回転速度検出回路104と、モータ105に指令信号として加速指令信号及び減速指令信号を生成する速度制御回路101と、加速指令信号を受信して充電動作を行い、減速指令信号を受信して放電動作を行う積分回路102と、積分回路102からの出力電圧でモータ105を駆動する駆動回路103とを備え、速度制御回路101は、モータ105を起動する前にモータ105が回転していないことを回転速度検出回路104が検出する状態となるように積分回路102からの出力電圧を予め定められた基準電圧へ高めるように指令信号を生成する。
(もっと読む)
回転角度位置検出装置及びその誤差検出方法
【課題】簡易な構成でレゾルバから出力される多相出力信号に基づいて位置検出値を演算する位置信号演算部の検出誤差を求める。
【解決手段】ロータの回転角に応じて360°/N(Nは3以上の整数)毎の位相差を有するN相の位置信号を出力するレゾルバ30と、該レゾルバから出力されるN相位置信号が入力され、当該N相位置信号を信号処理して位置検出値を演算する位置信号演算部200と、前記レゾルバ及び前記位置信号演算部間と、当該位置信号演算部内との何れか一方に設けた前記N相位置信号の前記位置信号演算部のN相入力端子への入力を順次シフトさせたN段階に切換える信号切換回路61と、該信号切換回路で入力を切換える毎に、前記位置信号演算部から出力される位置検出値に基づいて検出誤差を計測し、計測した各検出誤差の平均値に基づいて前記位置信号演算部の検出誤差を算出する検出誤差算出部62とを備えている。
(もっと読む)
ロータ熱感受性の診断および予測
【課題】非常に早い段階で修正措置を取ることができ、修理費の著しい節約ならびに機械の利用可能性の増加につながるようなロータ熱感受性のオンライン診断を提供する。
【解決手段】第1のシステムは、電気機械のロータの熱感受性を評価するために提供され、ロータから振動データおよび界磁電流を得るためのならびに一組の動作パラメータを得るための入力システムと、振動と界磁電流との間の関係を計算するためのシステムと、関係が有意であるかどうかを決定するための評価システムと、有意な関係を決定したことに応答して熱感受性の通知を発行するためのシステム。第2のシステムは、ある期間にわたる振動と界磁電流との間の一連の関係を計算するためのシステムと、その期間にわたる一連の関係の変化が有意であるかどうかを決定するための評価システムと、一連の関係の有意な変化を決定したことに応答して熱感受性の通知を発行するためのシステム。
(もっと読む)
インクジェット記録装置及びキャリッジ制御方法
【課題】短距離の移動でも高精度にキャリッジ位置決めを行うことができる記録装置と制御方法を提供する。
【解決手段】記録ヘッドを搭載したキャリッジをキャリッジモータから供給される駆動力によってガイドレールに沿って往復移動させながら、記録ヘッドからインクを吐出して記録媒体に記録を行う際に、キャリッジの往復移動方向に沿ったキャリッジの位置を検出し、位置検出信号に基づいて、キャリッジ速度を算出し、次に、その位置検出信号とキャリッジ速度信号とをフィードバックしてキャリッジモータを駆動制御する。そのフィードバック制御において、キャリッジモータを駆動制御するために用いられるモータ指令値に対して、キャリッジとガイドレールとの間に生じる摩擦による損失を補償し、その補償は算出された速度信号に基づいて、その摩擦が静止摩擦或は動摩擦であるかを判断し、その判断に従って補償値を決定する。
(もっと読む)
電気駆動原動機を備えた作業機
【課題】利用者が効率のよい作業機の作業範囲を簡単に見つけ出してこれを維持できるように、電気駆動原動機を備えた作業機を構成する。
【解決手段】係合回転数(nE)よりも上の所定回転数帯域(Δn)を備えた作業範囲(A)において、電気駆動原動機(2)の入力電力(P)と回転数(n)との関係を表わす制御特性曲線(10)を制御ユニット(4)によって設定する。前記所定回転数帯域(Δn)で回転数(n)が低下した時に駆動原動機(2)のトルク(M)が上昇するように、制御特性曲線(10)に従って前記所定回転数帯域(Δn)で入力電力(P)がほぼ等しい平均電力(PR)に低減されている。
(もっと読む)
軸トルク制御装置
【課題】負荷側モータ(エンジン)の回転数制御と駆動モータ(動力計)の軸トルク制御の干渉を抑制した軸トルク制御ができる。
【解決手段】軸トルク制御器は、エンジンが速度制御されている場合に動力計に対するトルク外乱を外乱オブザーバ21により推定して動力計のトルク指令値にフィードバックすることにより動力計の加速度制御系を構成する。さらに、軸トルク検出値または軸トルク推定値を共振比制御理論に基づいて決定されるゲインKr(28)で動力計の加速度指令値にフィードバックし、さらにまた、動力計の速度検出値ω2を所定の共振抑制効果が得られるように決定したゲインKvで動力計の加速度指令値にフィ−ドバックし、及び、軸トルク指令値に軸トルク検出値が追従するように比例積分制御系23を構成する。
(もっと読む)
モータ制御システム
【課題】車両に搭載される同一定格出力の2つのモータを全領域で効率よく駆動させる。
【解決手段】モータ制御システム1のECU8は、記憶部9とCPU10とを有する。記憶部9には、第1及び第2モータ4a,4bの全体としての効率に基づいて予め設定された低トルク領域、中トルク領域及び高トルク領域の境界を示す境界トルクTx,Tyが記憶される。CPU10の判定部12は、要求トルクTnと境界トルクTx,Tyとを比較して、モータ回転数Nと要求トルクTnとが属する領域を判定する。CPU10の制御部13は、判定された領域が低トルク領域の場合には、第1モータ4aのみを駆動し、中トルク領域の場合には、第1モータ4aが最大トルクを出力する状態で第1及び第2モータを駆動し、高トルク領域の場合には、第1及び第2モータを同等に駆動する。
(もっと読む)
モータ制御装置およびこれを備える電動パワーステアリング装置
【課題】モータの回転中においてモータの温度を正確に推定することのできるモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、モータの回転速度ωmが基準回転速度以上のとき、モータの逆起電力定数に基づいてモータの温度を推定する。また、モータの回転速度ωmが基準回転速度未満のとき、モータの抵抗に基づいてモータの温度を推定する。また、モータの温度の推定値が基準温度以上のとき、モータの温度の上昇を抑制するための制御として、モータの電流指令値Iaを制限する処理を行う。
(もっと読む)
操舵装置
【課題】 不揮発性メモリに推定温度データを書き込むことができなかった場合でも、過熱防止機能を維持しつつ、電動モータによる操舵機能が十分得られるようにする。
【解決手段】 マイコンは、EEPROMのデータが異常である場合には、予め高温設定された仮基板温度Tbmaxから温度センサにより検出された基板温度Tbを減算した基板温度変化値ΔT(Tbmax−Tb)を使って、モータ推定温度を計算するための各仮温度値SUM1max,SUM2max,SUM3maxを補正する(S61,S62)。従って、基板温度Tbに応じた初期値SUM1(n-1),SUM2(n-1),SUM3(n-1)を設定することができる。この場合、温度センサが異常である場合には、基板温度変化値ΔT(Tbmax−Tb)を使った補正を行わない(S63)。
(もっと読む)
モータ駆動制御装置
【課題】ステータコイルおよび界磁コイルを備えたリラクタンスモータの駆動制御により、回転に伴う界磁コイル電流やステータコイル電流の変化(変動)を抑制して所望のトルクおよび出力が得られるようにする。
【解決手段】回転角度検出器18によりリラクタンスモータ2の回転を検出し、電流指令値演算器20によりリラクタンスモータ2のトルク指令値およびステータコイル電流、界磁コイル電流の電流指令値を出力し、ステータコイル電流の電流指令値に基づく主インバータ装置27の電圧操作でステータコイル電流を制御し、界磁コイル電流の電流指令値に基づく界磁用インバータ装置30の電圧操作で界磁コイル電流を制御し、変動補償部32aにより、リラクタンスモータ2の回転に伴う界磁コイル電流の変動を低減する補償値を形成し、界磁コイル電流の電圧操作量を前記補償値により補正してリラクタンスモータの回転に伴う界磁コイル電流やステータコイル電流の変化(変動)を抑制する。
(もっと読む)
電動機の速度制御装置及び速度制御方法
【課題】目標値応答と外乱応答を個別に最適化可能な電動機の速度制御装置を提供する。
【解決手段】速度制御手段を、速度指令と速度帰還の偏差に積分ゲインGIを乗算して積分する積分増幅器221と、速度指令を共通の入力とし、比例ゲインGF1を有する不完全微分器の出力及び比例ゲインGF2を有する1次遅れ演算器の出力を加算して出力するフィードフォワード補償器224と、積分増幅器221の出力から速度帰還を減算すると共に、フィードフォワード補償器224の出力を加算する加減算器222と、この出力にゲイン調整パラメータGPを乗算してトルク指令を得る比例増幅器223とで構成する。速度指令応答時定数をτr、トルク外乱応答時定数をτd、電動機を含む負荷慣性モーメントをJとしたとき、G1=1/τd、GP=σr×J、GF1=1/(σr×τr)、GF2=1−τr/τdを満たすようにする。
(もっと読む)
車両の故障診断装置
【課題】モータ装置を作動させる必要が生じる前に、前記モータ装置の故障を検出することができる車両の故障診断装置を得ること。
【解決手段】本発明の車両の故障診断装置は、モータ装置に供給される駆動信号とモータ装置の回転数に基づいてモータ装置の故障診断を行う。例えば、駆動信号がONの場合にモータ装置の回転数が所定値以下のときは、モータ装置の故障ありと判定し、駆動信号がOFFの場合にモータ装置の回転数が所定値よりも高いときは、モータ装置の故障ありと判定する。これにより、自動停止・始動システムによって内燃機関を自動停止させる前に、スタータ100又はPSM112の故障の有無を判定することができる。
(もっと読む)
適応ノッチフィルタ、及びノッチフィルタのパラメタ調整方法
【課題】制御帯域を広げたときに生じる振動周波数成分を抑制するよう自動的にノッチフィルタを調整する。
【解決手段】適応ノッチフィルタは、共振が生じ得る制御対象への制御入力を生成するための信号に含まれる当該制御対象の固有振動数成分を抑制するためのノッチフィルタと、ノッチフィルタの中心周波数及びノッチ幅を含むパラメタを調整するためのパラメタ調整部と、を備える。パラメタ調整部は、制御対象の制御帯域を広げたときに生じた振動周波数成分とノッチフィルタの中心周波数との関係に応じて、調整されるべきノッチフィルタのパラメタを選択する。
(もっと読む)
モータ及び揺動コンベヤ
【課題】揺動コンベヤを駆動し、揺動コンベヤのトレーの前進速度、後退速度及び加速度を簡単に変更することができるモータの提供。
【解決手段】所定角度回転する都度パルス信号を出力する手段24を有し、その出力したパルス信号に基づき、回転速度を制御するモータ23。モータ軸又はモータ軸に連動する回転軸に設けられた基準点を検出する基準点検出器43と、基準点検出器43が基準点を検出してから、パルス信号又はパルス信号に基づく信号を計数する計数手段22aと、回転速度を、基準点検出器43が基準点を検出したときにN2とし、計数手段22aの計数値がC1に到達したときに加速してN1(>N2)とし、計数手段22aの計数値がC2(>C1)に到達したときに減速してN2とし、基準点検出器43が基準点を再度検出したときに、計数手段22aをリセットする速度制御手段22とを備えている。
(もっと読む)
モータ制御装置、画像形成装置およびモータ制御方法
【課題】 モータが劣化する場合であっても安定した回転速度で回転させること。
【解決手段】 プリンタは、モータの回転速度を検出する検出部61と、目標回転速度に対するモータの回転速度の偏差に応じてモータの回転速度を目標回転速度に一致させるように、少なくとも偏差および偏差の積分値に応じた利得をフィードバックするフィードバック制御部63と、を備え、フィードバック制御部63は、偏差に応じて、少なくとも偏差の積分値に対応するゲイン定数をより大きな利得が得られるゲイン定数に変更する変更部71を含む。
(もっと読む)
回転機の制御装置
【課題】モデル予測制御を行なうものにあって、モデル誤差によって制御量の制御性が低下することを抑制する。
【解決手段】電気角速度ωが閾値速度ωF以上であることを条件に(ステップS32:YES)、q軸の予測電流と実際の電流との誤差(予測誤差Δiq)をゼロにフィードバック制御すべくd軸インダクタンスLdを操作する(ステップS34)。また、d軸の予測電流と実際の電流との誤差(予測誤差Δid)をゼロにフィードバック制御すべくq軸インダクタンスLqを操作する(ステップS36)。そして、予測誤差Δid,iqがゼロとなった際のd軸インダクタンスLdやq軸インダクタンスLqを学習値として記憶する(ステップS38)。
(もっと読む)
モータ制御装置を含む制御機器
【課題】発振時の安定化等で制御パラメータが変更された時、機器の安定動作と稼働率低下抑制を両立させることを目的とする。
【解決手段】モータ制御装置は、速度指令あるいは位置指令を入力して、それに追従するようにモータの回転速度あるいは回転位置を検出してフィードバック制御を行うフィードバックループを有するものである。このモータ制御装置は、第1の制御性能判断部11と、制御パラメータ変更部10と、モータ1の位置を検出する位置検出器3からの出力信号を受ける速度演算器4と、位置制御器5と、速度算出器の出力信号を受ける発振検知部9と、発振検知部9からの出力信号を受ける速度制御器6と、トルク制御器7と、を備える。
(もっと読む)
電気推進船の駆動装置及び駆動方法
【課題】船内電源の電源母線の電圧を急変動させることなく、簡単な方法で停止制御を行うことが可能な電気推進船の駆動装置及び駆動方法を提供する。
【解決手段】船舶の推進用プロペラPの軸に接続した電動機1と、船内電源3から給電され、電動機1を駆動する電力変換装置2と、電力変換装置2を制御する制御装置4とで構成する。制御装置4は、外部からの速度指令に基づいて速度制御してトルク基準を出力する速度制御部41と、外部からの運転指令に基づいて電動機1の運転停止を制御する運転シーケンス制御部46を備える。運転シーケンス制御部46は、外部からの運転指令がオフとなったとき、一旦速度基準を所定の減速率で減速し、トルク基準が所定値以下となるか、または力行から回生に変化したときに電力変換装置2を停止して電流を遮断する。
(もっと読む)
61 - 80 / 402
[ Back to top ]