
Fターム[5H501LL01]の内容
Fターム[5H501LL01]の下位に属するFターム
アナログ値で検出するもの (71)
デジタル値で検出するもの (383)
センサレスで検出するもの (103)
Fターム[5H501LL01]に分類される特許
101 - 120 / 402
モータドライブ制御装置、モータドライブ制御方法
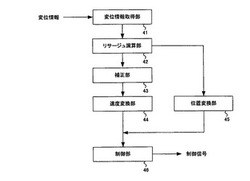
【課題】 モータドライブ装置の移動子の位置情報の再現性を維持しつつ、速度リップルを低減することができるモータドライブ制御装置、モータドライブ制御方法を提供する。
【解決手段】 モータドライブ装置における移動子より出力される位相のずれた2つの正弦波状信号に基づくリサージュ曲線に近似する楕円を示す楕円パラメータを算出する楕円算出部と、前記楕円パラメータにより示される楕円が真円となるように前記2つの正弦波状信号を補正する補正部と、前記補正された2つの正弦波状信号に基づくリサージュ曲線を前記移動子の移動速度を示す速度情報に変換する変換部と、前記速度情報とに基づいて、前記モータドライブ装置を制御する制御部とを有する。
(もっと読む)
エレベータ制御装置

【課題】ばね系の影響を単純にモデル化することによって任意のタイミングでイナーシャ同定を行い、即座に良い乗り心地を実現できるエレベータ制御装置を提供する。
【解決手段】制御対象であるエレベータ1に設けられた動力装置2に、速度指令入力器9aから速度指令値が入力されるエレベータ制御装置9において、エレベータ1のイナーシャの値を算出する際、力学的エネルギーからイナーシャを算出することによって、従来無視していたばね系の影響を考慮し、任意の時点で正確なイナーシャ値を算出するイナーシャ算出器9hを備えた。
(もっと読む)
モータ制御装置、電動パワーステアリング装置及び車両用操舵装置
【課題】簡素な構成にて、過電流の発生が回路に与える影響を有効に排除することが可能なモータ制御装置、電動パワーステアリング及び車両用操舵装置を提供すること。
【解決手段】プリドライバ22の給電線Lp2には、電源遮断手段としてのリレー回路40が設けられる。そして、同リレー回路40は、マイコン21の出力するリレー信号S_rlyにより、その作動が制御される。
(もっと読む)
電動機の制御装置
【課題】簡単な調整によって負荷機械に応じた適切な制御パラメータを得ることができ、多種多様な負荷機械を高精度かつ安定に運転可能とした電動機の制御装置を提供する。
【解決手段】電動機16により駆動される負荷機械20の位置が位置指令に一致するように電動機16を制御する制御装置であって、位置制御部12、速度制御部13及び電流制御部16を有する制御装置において、実現したい応答の速さを示す応答性設定信号と負荷機械種別判別信号とに基づいて、位置制御部12、速度制御部13及び電流制御部16にて使用する制御パラメータを自動的に演算する制御パラメータ設定手段23を備え、この制御パラメータ設定手段23における制御パラメータの演算アルゴリズムを、前記負荷機械種別判別信号に応じて変更する。
(もっと読む)
建設機械の旋回制御装置
【課題】旋回の速度指令に加速度制限を持たせることで起動時のショックを小さくするとともに該加速度制限を多段階に切換えることで作業効率の低下を抑えることが可能な建設機械の旋回制御装置を提供することを目的とする。
【解決手段】本発明は上記目的を達成するために、旋回体の旋回を電動モータで速度制御を行うようにした建設機械の旋回制御装置において、旋回の速度指令における加速度の制限を多段階に切換える制御手段11を有する建設機械の旋回制御装置を提供するものである。
(もっと読む)
電動車両用制御装置、並びに、これを備えた電動車両及びフォークリフト
【課題】高い振動減衰率を有すると共に、加速性能を維持した電動車両用制御装置、並びに、これを備えた電動車両及びフォークリフトを提供する。
【解決手段】駆動タイヤ及び車軸を有する車体と前記駆動タイヤにトルクを付与する駆動モータMとを備える電動車両F1に用いられ、駆動モータMに対してモータ制御指令T*を供給する電動車両用制御装置1であって、前記車軸を中心とした前記電動車両F1の上下振動を示す振動パラメータによって駆動モータMをフィードバック制御することを特徴とする。
(もっと読む)
イナーシャと摩擦を同時に推定する機能を有する電動機の制御装置
【課題】イナーシャと摩擦とを同時に推定し、イナーシャの推定精度を向上する機能を有する電動機の制御装置を提供すること。
【解決手段】速度フィードバックサンプリング部32から出力される速度フィードバック値ω(n)FBは、逆関数モデル33および逆関数推定部34に入力する。逆関数モデル33は、逆関数推定部34で推定された推定イナーシャJmと推定摩擦Cfとを同時に加味した関数式である。逆関数モデル33では、推定摩擦Cfは、推定粘性摩擦と推定クーロン摩擦とを区別して計算する。逆関数モデル33からは電流値を推定した推定電流値x(n)が出力される。そして、推定電流値x(n)と電流フィードバック値i(n)FBとの差である推定誤差e(n)を求める。逆関数推定部34は、推定誤差e(n)が小さくなるように、逆関数モデル33の係数を計算により推定する。
(もっと読む)
モータ速度制御装置
【課題】簡単な構成でさまざまな形式で複雑な目標速度指令を生成することができ、マイクロプロセッサの負担を小さくして多様なシステムに対応する。
【解決手段】モータ115の速度をフィードバック制御するモータ速度制御装置において、モータ制御装置モータ115の速度に対応するモータ速度パルス(fg_pulse)と、目標速度に対応する目標速度パルス(ref_pulse)とを入力して、モータ速度が目標速度に近づくようにモータ115を駆動するモータ速度制御手段108と、目標速度パルスを発生するモータ目標速度発生手段101とを備え、モータ目標速度発生手段101は、入力指令に比例した周波数のパルスを前記目標速度パルスとして出力する可変周波数発振器106と、可変周波数発振器106の入力指令として、外部入力パルスと可変周波数発振手段の出力位相差に応じた値及び直接周波数指令値の一方を選択するセレクタ105とを備える。
(もっと読む)
負荷試験装置
【課題】負荷トルクの変動に対して、回転数がどの程度一定で保持することができるのかを検証することができる簡易な構成の負荷試験装置を提供することにある。
【解決手段】予め定めた回転数で回転駆動する試験対象となる被試験駆動装置に負荷トルクを作用させる負荷作用部と、前記被試験駆動装置に作用している実際の負荷を検出する負荷検出部と、を備えた負荷試験機であって、前記負荷作用部は、被試験駆動装置の駆動軸に連結固定される測定子と、該測定子を把持する把持機構と、該把持機構の把持力を調整可能とする把持力可変手段と、を備え、前記把持機構の把持部と測定子との接触面間のすべり摩擦トルクを負荷トルクとして載荷することを特徴とする。
(もっと読む)
電気自動車のモータ位置及びクリープ制御装置とその制御方法
【課題】電気自動車のモータ位置及びクリープ制御装置とその制御方法を提供する。
【解決手段】電気自動車のモータ位置及びクリープ制御装置において、車両停止からブレーキ解除後の一定時間までモータ位置制御を維持する時間を決定するモータ位置制御決定部と、モータ位置を維持するためのモータトルクを計算して、モータの位置を維持させるモータ位置制御部と、モータのクリープトルクを時間遅延を通して発生させると同時に、モータ速度を一定にする水準で制御するクリープトルク制御部とを含めて構成されることを特徴とする。
(もっと読む)
車両の駆動制御装置
【課題】電動機の回転数を目標回転数に同期させる際、蓄電器に高い負荷をかけずに電動機を制御する車両の駆動制御装置を提供すること。
【解決手段】主駆動軸に駆動力を出力可能な駆動源と、従駆動軸に駆動力を出力可能な電動機と、電動機に電力を供給する蓄電器と、従駆動軸と電動機の間の経路上に設けられ、電動機からの駆動力を従駆動軸に伝達する動力伝達部とを備えた車両の駆動制御装置は、従駆動軸の回転数に基づいて電動機の目標回転数を決定する目標回転数決定部と、蓄電器の状態に応じた当該蓄電器の最大出力を導出する最大出力導出部と、駆動源からの駆動力によって車両が走行している状態で電動機の駆動を開始するとき、電動機の回転数が目標回転数に同期するよう電動機を制御する制御部とを備える。制御部は、最大出力導出部が導出した蓄電器の最大出力に応じて、電動機の回転数を目標回転数に同期させる際の制御ゲインを決定する。
(もっと読む)
電動機械の制御装置
【課題】 検出出力にリップル成分が含まれていてもその影響を受けることなく適応ノッチフィルタ手段のノッチ中心周波数修正をより高精度に行うことのできる制御装置を提供する。
【解決手段】 本発明の制御装置においては、電動機械を構成している電動機1の速度を制御する速度制御手段4と電動機1との間に適応ノッチフィルタ手段が挿入される。適応ノッチフィルタ手段は、電動機1に設置された速度検出手段3の出力からリップル成分を除去した信号を生成し、生成した信号に基づいてノッチ中心周波数推定動作を行なう。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】 被駆動体を駆動するDCモータの角速度を目標角速度までフィードフォワード制御で立ち上げた後の角速度の大きな変動を防止する。被駆動体が交換された直後も、角速度の大きな変動を防止する。
【解決手段】 DCモータの起動時に、DCモータへ指示する制御値を、目標角速度より小さい角速度に対応する第1の制御値NSTAから目標角速度より大きい角速度に対応する第2の制御値NENDまで増加させ、DCモータが目標角速度になったことに応じて、目標角速度に対応した第3の制御値に切り替え、その後、DCモータの角速度に応じた第4の制御値をDCモータへ指示する。被駆動体が新品でない場合、過去の第4の制御値を第3の制御値とし、新品の場合、予め決められた制御値を第3の制御値とする。
(もっと読む)
アクチュエータの制御装置
【課題】位置指令や速度指令が急激に変化しても大きな躍度が発生することなく位置や速度を高応答に制御可能なアクチュエータの制御装置を得ることを目的とする。
【解決手段】アクチュエータ1の位置検出値θと位置指令θ*との位置偏差Δθが零になるように位置偏差Δθを増幅して速度指令ω*を出力する位置偏差増幅手段4、および速度指令ω*に一致するようにアクチュエータ1の速度を制御するアクチュエータ速度制御手段5を備え、この位置偏差増幅手段4は、位置偏差Δθの絶対値が所定の位置偏差境界値以下の第1の範囲では位置偏差Δθに比例させて速度指令ω*を出力し、位置偏差Δθの絶対値が所定の位置偏差境界値以上の第2の範囲では第1の範囲での出力と連続するとともに位置偏差Δθの(1/2)乗に比例させて速度指令ω*を出力する。
(もっと読む)
機械装置の制御装置及び機械装置の特性同定方法
【課題】 モータに動力伝達部を介して被駆動部を機械的に結合したものを制御対象とするような機械装置への適用に適し、機械装置における摩擦や装置の自重のような外乱が存在しても精度良く装置特性を同定して駆動制御を実行することのできる制御装置を提供する。
【解決手段】 制御装置は、トルク指令値τMを受けるモータ10と被駆動部11との間を動力伝達部12で連結した慣性共振系を制御対象とし、該制御対象の状態量としてモータ軸角速度ωMを計測する計測手段と、前記モータ、動力伝達部、被駆動部に起因する外乱トルクを推定する外乱オブザーバ17と、推定された外乱トルクを前記トルク指令値から減算する減算部18と、前記減算部の出力及び前記モータ軸角速度ωMに基づいて前記制御対象のパラメータを同定する制御対象特性同定器15を含み、同定されたパラメータに基づいて前記トルク指令値を調整する。
(もっと読む)
サーボ制御装置
【課題】位置制御の精度向上を実現すること。
【解決手段】モータの回転運動を直線運動に変換するねじ送り部と、ねじ送り部によって直線移動させられる被駆動部と、ねじ送り部及び被駆動部が支持される支持体とを備える数値制御機器に適用され、被駆動部の位置を位置指令に一致させるようにモータを制御するサーボ制御装置であって、支持体の振動反力による被駆動部の振動を補償する支持体反力補償部311を備え、支持体反力補償部311が備える伝達関数には、被駆動部の剛性項が含まれているサーボ制御装置を提供する。
(もっと読む)
電動機の安全装置
【課題】 単純な構造で電動機の停止状態を含む低回転状態を検出できること。
【解決手段】 回転速度センサに、予め設定された値に基づいて所定の周期のトグル信号を発生する信号発生手段と、回転速度信号とトグル信号とに基づいて電動機が低回転状態か否かを判定し、低回転状態を検出した場合は、トグル信号よりも長い予め定められた周期の交流信号を低回転速度信号として出力する低回転速度信号生成手段とを設け、信号伝送回線を介して接続される異常検出手段は、この低回転速度信号を入力して、低回転速度信号が予め定められた周期であった場合のみ、電動機が低回転状態であるとして低回転状態検出信号を出力する。
(もっと読む)
電動車両の制御装置
【課題】制振効果を図りつつ、トルク振動の発生を抑止する。
【解決手段】制御ブロック7hは、減算器7gの出力値、すなわち、第2のトルク目標値の第1項Tm*2_1から第2のトルク目標値の第2項Tm*2_2を減算した値に対してフィルタ処理を施すことにより第2のトルク目標値Tm*2を出力する。ここで、制御ブロック7hにおける伝達特性Gz(s)は、車両同定モデル(Gp(s))の分子2次式を分子とするとともに、前記車両同定モデルの分子から演算される減衰係数(第1の減衰係数)ζzよりも大きく、かつ、1以下に設定された減衰係数(第2の減衰係数)ζc(ζz<ζx≦1)を有する2次式を分母としている。
(もっと読む)
位置決め装置の同期防振制御装置
【課題】モータ軸と負荷間をボールねじやタイミングベルト等の負荷位置によりバネ定数が大きく変化する機構で接続した位置決め装置に負荷側外乱オブザーバを適用した場合においても、バネ定数の変化の影響を受けない精度の高い負荷側外乱の推定を可能とし、外乱に対する高いロバスト性を持たせて、振動抑制と同期制御を実現可能する。
【解決手段】モータ軸と負荷間を弾性体で接続した、負荷位置によりバネ定数Kfが大きく変化する位置決め装置において、負荷側の軸ねじれ角を測定し、軸ねじれ角と負荷の加速度に基づいて構成した負荷側外乱オブザーバ40にて推定した負荷側の外乱を、負荷側外乱から位置指令値までの逆システム50を通してフィードバックする際に、負荷側外乱オブザーバ内のバネ定数ノミナル値Kfnを負荷位置により変える。
(もっと読む)
モータを電磁的に制動するための方法及び装置
【課題】ブレーキアセンブリの性能を最適化し、全体効率を増加させる。
【解決手段】電磁石、永久磁石、ロータアセンブリ、及びブレーキパッドを有する電磁ブレーキを使用してモータを選択的に制動するための電磁的ブレーキシステム及び方法が提供される。ブレーキアセンブリは、電磁石が非励磁化されたときに利き、電磁石が励起されたときに解放する。利いているとき、永久磁石は、ブレーキパッドをハウジングと摩擦係合させ、解放されたとき、電磁石は、永久磁石の磁束を相殺して、板ばねがブレーキパッドを移動させてハウジングから離れるようにする。コントローラは、ある種のパラメータに基づいて主バス電圧VMをより低い制動電圧に変換するためのDC/DC変換器を有する。その変換器は、パルス幅変調(PWM)を利用して制動電圧を調整する。ブレーキアセンブリが解放されたときに、ブレーキパッドと永久磁石の間に調整空隙が画定され、それはコントローラにより動的に変更される。
(もっと読む)
101 - 120 / 402
[ Back to top ]