
Fターム[5H540AA10]の内容
Fターム[5H540AA10]に分類される特許
1 - 20 / 124
リニアコンベア
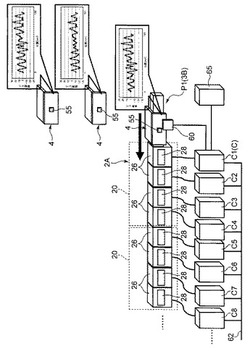
【課題】位置補正用データの管理負担を伴うことなく搬送台車を高い精度で位置決めする。
【解決手段】リニアコンベアは、複数の電磁石ユニット26を含み、電磁石ユニット26毎に個別に通電制御が可能なリニアモータ固定子7と、永久磁石44からなるリニアモータ可動子8及び位置補正用データが記憶されたRFタグ55をそれぞれ備える複数のスライダ4と、各電磁石ユニット26の通電制御を個別に行う複数のモータコントローラCと、RFタグ55の情報を読み取るリーダライタ60と、を備える。各モータコントローラCはそれぞれ、リーダライタ60が読み取った各スライダ4の位置補正用データを記憶しておき、スライダ4を目標位置で停止させる際には、対象となるスライダ4の位置補正用データを用いて目標停止位置を補正し、この補正後の目標停止位置に基づいて電磁石ユニット26への通電制御を行う。
(もっと読む)
線形運動デバイスの制御装置、線形運動デバイスの制御方法

【課題】検出磁場がコイル磁場の干渉を受ける場合にも、制御可能な範囲が変化しない線形運動デバイスの制御装置を提供する。
【解決手段】線形運動デバイス12の磁石10が発生する磁場から出力信号SDを出力する磁場センサ13、線形運動デバイス12を移動すべき目標位置を指示する目標位置信号SHに基づくデバイス位置指令信号SEを補正して出力するデバイス位置指令信号生成回路19、出力信号SD、デバイス位置指令信号SEの偏差を示す操作量信号SFを出力する差動増幅器14、操作量信号SFに応じて線形運動デバイス12を駆動する出力ドライバ17、18によって制御装置を構成する。デバイス位置指令信号生成回路19は、デバイス位置指令信号SEをコイル電流によって発生する磁場に対応する補正値によって補正する。
(もっと読む)
線形運動デバイスの制御装置、線形運動デバイスの制御方法
【課題】 線形運動デバイスが端点間の移動の際に発生する衝突音を抑制する。
【解決手段】磁石10が発生する磁場から出力信号SDを出力する磁場センサ13、線形運動デバイス12が目標位置にある場合に出力されるデバイス位置指令信号SEを出力するデバイス位置指令信号生成回路22と出力信号SDとデバイス位置指令信号SEとの偏差を示す操作量信号SFを出力する差動増幅器14、線形運動デバイス12に、XBOTに向かう力とXTOPに向かう力とを交互に加えながら、XBOT、XTOP間を移動させるドライバ制御信号SGを出力する端点移動制御回路19、ドライバ制御信号SG、操作量信号SFのいずれか一方を選択するスイッチ20、ドライバ制御信号SGまたは操作量信号SFに応じて線形運動デバイス12を駆動する出力ドライバ17、18によって線形運動デバイスを制御する。
(もっと読む)
リニアモータ装置とリニアモータ装置を駆動する方法
【課題】スイッチングリップルによる他の駆動回路への影響を低減したリニアモータ装置とリニアモータ装置を駆動する方法とを提供することを目的とする。
【解決手段】ライン状に整列され、順次電流駆動される複数のリニアモータと、複数のリニアモータコイルの各々に隣接して配置される複数のリップル相殺用リニアモータと、を備えリップル相殺用リニアモータは、隣接するリニアモータが電流駆動される場合に、リニアモータにより生成される磁界を低減させるように、リップル相殺用リニアモータのコイルにリップル成分のみを供給するリニアモータ装置とする。
(もっと読む)
リニア振動モータの駆動制御装置、リニア振動モータの駆動制御方法および小型電気機器
【課題】電源電圧の低下に起因する動作と、特定の制御モードへの切り換えに起因する動作との混同を抑制することができるリニア振動モータの駆動制御装置、リニア振動モータの駆動制御方法および小型電気機器を提供する。
【解決手段】リニア振動モータの停止制御の開始前後における振動振幅の時間的変化の度合いを、通常の制御モードから他の制御モードへの遷移の前後における度合いよりも小さくする。そのようにすることで、リニア振動モータの停止制御の開始前後における作動音の変化の度合いを、制御モードの遷移前後における作動音の変化の度合いよりも小さくすることができる。すなわち、作動音の変化の度合いの違いによって、電池残容量の低下に伴う停止制御に起因する作動音の変化なのか、制御モードの遷移に起因する作動音の変化なのかを、ユーザは聴覚を通じて識別することが可能となる。
(もっと読む)
リニアアクチュエータの駆動方法
【課題】異常を早期に検出することのできるリニアアクチュエータの駆動方法を提供する。
【解決手段】振幅制御部40は、固定子11に対して往復動される可動子12の振幅を検出し、その検出した振幅の時間的変化に応じて負荷の経時的な変動を検出し、その変動から異常を検出する。また、振幅制御部40は、検出した振幅を制御出力部50に出力する。この制御出力部50は、制御出力部50からの振幅情報に基づいて、可動子12を往復動させるための駆動電流Idを制御する。
(もっと読む)
振動発生装置
【課題】機械振動子の固有周波数にバラツキがあっても歩留りが高く低コストで振動触覚ハプティクス効果を発揮できる振動発生装置の提供。
【解決手段】振動発生装置は、減衰比ζ<1で減衰系の機械振動子3をバネ要素Sを介して固定部Bに対し支持し、機械振動子3を非接触で振動させる動磁界を生成する電磁コイルLを備え、このコイルLに印加される駆動電圧V(t)の周波数fを機械振動子3の減衰系固有周波数fdから外れた非共振周波数として機械振動子3がうなり振動を起す。うなり振動の振幅を規定するうなり波のうち駆動開始側の1番谷部から1番山部を超えた2番谷部において駆動電圧V(t)の印加を停止する強制振動制御部20を有する。
(もっと読む)
リニアソレノイドの電流制御装置
【課題】温度や電圧に変化が生じた場合でも所望の電流応答を実現できるリニアソレノイドの電流制御装置を提供することにある。
【解決手段】マイクロコンピュータ22によって目標電流値が変化したと判断された場合には、目標電流値に相当するデューティ値と目標電流前回値に相当するデューティ値との差分を算出する。算出したデューティ値の差分に対して、温度センサSE1の出力値によって温度補正を行う。温度センサSE1の出力値によって補正したデューティ値の差分に対し、さらに電源電圧によって電圧補正を行う。マイクロコンピュータ22は温度と電圧で補正したデューティ値の差分を基に補正後指示電流を算出し、電流制御IC23に出力する。
(もっと読む)
リニアモーター
【課題】リニアモーターの制御性を向上させる技術を提供する。
【解決手段】リニアモーター10は、スライダー20と、ステーター30とを備える。スライダー20は、複数の永久磁石21が、同じ極同士が互いに対向するように直列に配列された磁石列21lを有し、電磁力によって磁石列21lの配列方向に沿って移動する。ステーター30は、スライダー20の移動方向に沿って配列された2相の電磁コイル31a,31bを備える。また、リニアモーター10は、スライダー20の移動を制御するために、磁石列21lの移動に伴う磁束の変化を検出する位置検出センサー40を備える。位置検出センサー40は、電磁コイル31の各相に対応して設けられ、電磁コイル31の外周に配列され、永久磁石21同士の境界における磁束を検出し、各相の電磁コイル31に生じる逆起電圧と等しい位相の波形信号を出力する。
(もっと読む)
制御装置、及び制御方法
【課題】位置フィードバック機構を用いたモータの制御において、整定時間を短縮することができる制御装置を提供する。
【解決手段】制御装置は、外部より一定間隔ごとに入力される位置指令値から位置指令値の変化量を算出し、算出した変化量に基づいて、モータにおいて生じる位置指令値に対する動作の遅れを補正する補正値を算出する位置指令補正部と、補正値により位置指令値を補正した補正位置指令値に応じた電力をモータに供給する駆動部とを具備する。
(もっと読む)
リニアモータの制御装置、及びリニアモータ装置
【課題】リニアスケールを用いずにリニアモータの位置決め精度を改善することができるリニアモータの制御装置を提供する。
【解決手段】リニアモータの制御装置は、リニアモータの電機子が有している磁気センサであってリニアモータの駆動用磁石より生じる磁界の方向に応じた信号を出力する磁気センサから出力される信号の変化に基づいてリニアモータの可動子の位置を検出する位置検出部と、位置検出部が検出した可動子の位置と外部より入力される位置指令値とに基づいて速度指令値を算出する位置制御部と、リニアモータに備えられている複数のコイルに流れる電流値から可動子が移動する速度を推定する推定部と、位置制御部が算出する速度指令値と推定部により推定する可動子の推定移動速度とに基づいて電流指令値を算出する速度制御部と、速度制御部が算出した電流指令値に応じて複数のコイルに電力を供給する電力変換器とを備えている。
(もっと読む)
電気負荷装置の診断装置
【課題】 電気負荷装置(ソレノイド)の地絡等の故障を確実に診断する。
【解決手段】 制御装置(マイコン)から駆動回路への駆動信号と、駆動回路の出力状態に応じたステータス信号とを比較する。具体的には、ステータス信号の立ち上がり時に、駆動信号のレベルを判定し、例えばHレベルで整合性があれば、ステータス信号は有効と判断し、ステータス信号のカウントにより正常と診断する。ソレノイドの地絡故障を生じた場合は、駆動回路の出力が固定され、ステータス信号は発生しなくなる。また、仮に擬似的信号を発生したとしても、その立ち上がり時の駆動信号のレベルを判定し、Hレベルでなければ、ステータス信号は無効と判定する。それゆえ、誤診断を防止できる。
(もっと読む)
ボイスコイルモータの制御方法及びレンズフォーカスシステム
【課題】ボイスコイルモータの制御方法及びレンズフォーカスシステムの提供。
【解決手段】本発明によると、ボイスコイルモータの制御方法は、該ボイスコイルモータのコイル電流の総変動量を分割して多次変動とし、毎次変動する時間を該ボイスコイルモータのスプリング共振周期の2分の1とし、これにより大幅にスプリングの共振程度を低減し、これによりボイスコイルモータをスピーディーに安定させ、ひいてはフォーカス時間を短縮する。
(もっと読む)
検知方法、露光方法、及びデバイス製造方法
【課題】固定子と可動子との間の距離の変化を検知可能な検知方法、この検知方法による検知結果に基づいて基板にパターンを転写露光する露光方法、及びこの露光方法を利用してデバイスを製造するデバイス製造方法を提供すること。
【解決手段】検知方法は、第1方向に沿って配列された複数の固定子に対して可動子を第1方向に沿って第1の速度で等速移動させ、等速移動させたときの可動子の第1方向における第1の推力の大きさを検出し、複数の固定子に対して可動子を第1方向に沿って第1の速度とは異なる第2の速度で等速移動させ、等速移動させたときの可動子の第1方向における第2の推力の大きさを検出し、第1及び第2の速度と、第1及び第2の推力の大きさとを用いて、固定子と可動子との間に作用するコギング力の大きさを算出し、算出ステップによって算出されたコギング力の大きさに基づいて、固定子と可動子との間の距離の変化を検知する。
(もっと読む)
スプリングリターン機構付きボイスコイルモータの駆動回路および駆動方法ならびにそれらを用いたレンズモジュールおよび電子機器
【課題】スプリングリターン機構付きVCMの振動を抑制可能な制御技術を提供する。
【解決手段】駆動回路100は、スプリングリターン機構付きボイスコイルモータ110を駆動する。駆動電流生成部10は、ボイスコイルモータ110のコイルL1に、アナログ制御信号V2に応じた駆動電流Idrvを供給する。波形メモリ40は、ボイスコイルモータ110の駆動電流Idrvの時間波形を記述するデジタルの波形データWDを格納する。波形データWDは、その周波数成分から所定の周波数成分が取り除かれている。制御部30は、ボイスコイルモータ110の共振周波数f0に応じたレートで、波形メモリ40から波形データWDを読み出し、デジタルコードS2として出力する。D/Aコンバータ16は、デジタルコードS2をアナログ制御信号V2に変換し、駆動電流生成部10へと出力する。
(もっと読む)
リニアアクチュエータ駆動装置
【課題】可動子の自重により生じるオフセットズレを補正するリニアアクチュエータ駆動装置を提供する。
【解決手段】駆動装置1は、駆動指令Irefに応じて可動子23を往復させる電磁駆動部10と、通電がなされていない時、可動子23が自重により所定の移動可能範囲Dの中心Dcからズレて可動範囲W1が移動可能範囲Dよりも狭くなる場合に、可動子23の往復動中心Wcと移動可能範囲Dの中心Dcとの偏差を無くする方向へ可動子23の往復動中心Wcを移動させるオフセット通電をなすように駆動指令Irefを補正するオフセット補正部11とを有している。オフセット補正部11は、駆動指令Irefに応じた可動子23の振幅値Lpに対応する振幅情報を取得し、振幅情報に対応する振幅値Lpに対して可動振幅(W1/2)が可動域不足状態となる場合に駆動指令Irefの補正する一方、可動域不足状態でない場合に駆動指令Irefの補正を解除する。
(もっと読む)
駆動制御回路およびフォーカス制御回路
【課題】PWM駆動電流に起因するノイズを低減する。
【解決手段】イコライザ30は、対象物の状態に係る目標値とその実測値との差分をもとに、対象物の状態を目標値に合わせるための制御信号を生成する。PWM変調部40は、イコライザ30により生成される制御信号に応じたPWM信号を生成する。Hブリッジ駆動部50は、PWM変調部40により生成されたPWM信号に応じて、対象物の状態を変化させる駆動素子12を駆動するための駆動電流を生成する。スルーレート制御部60は、制御信号に応じて、Hブリッジ駆動部50の電流駆動能力を変化させる。
(もっと読む)
リニア振動モータの駆動制御回路
【課題】リニア振動モータの駆動終了時において、最適な停止制御を実現する。
【解決手段】リニア振動モータ200の駆動制御回路100において、駆動信号生成部10は、リニア振動モータ200の駆動終了後、その駆動時に生成していた駆動信号の位相に対して逆位相の駆動信号であって、駆動部20がハイインピーダンス状態に制御されるハイインピーダンス期間を含む駆動信号を生成する。誘起電圧検出部30は、ハイインピーダンス期間にコイルL1に発生する誘起電圧を検出する。コンパレータ41は、所定の不感帯では出力レベルが変化しないヒステリシスコンパレータとしての機能を備え、ハイインピーダンス期間に、ハイレベル信号またはローレベル信号を出力する。駆動信号生成部10は、コンパレータ41から、連続する前記ハイインピーダンス期間に、連続して同相信号が出力されたとき、リニア振動モータ200が停止したと判定する。
(もっと読む)
電動アクチュエータ駆動装置及びこれを備えた制振装置
【課題】駆動指令信号が過大になることに対する対策を適正化した電動アクチュエータ駆動装置を提供する。
【解決手段】周期的信号たる電流指令I41の振幅及び位相に対応する振幅情報及び位相情報を有する指令ベクトルに基づいて電流指令I41を生成するものであり、指令ベクトルは互いに交わる複数のベクトルで表現され、指令ベクトルを表現する各ベクトルの大きさを示す適応フィルタ係数(Re、Im)をそれぞれ算出する係数算出手段44と、係数算出手段44により算出される各々の適応フィルタ係数(Re、Im)に基づいて電流指令I41を生成する指令信号生成手段45と、所定の条件が成立している場合に電流上限超過信号S41を生成して係数算出手段44に入力する電流超過検出手段4cとを有し、係数算出手段44は、電流上限超過信号S41が入力されている間、全ての適応フィルタ係数を電流指令I41が制限される方向に修正し、各適応フィルタ係数に対する修正の割合が全ての適応フィルタ係数で同一となるように抜き係数kを用いた。
(もっと読む)
モータ駆動装置
【課題】磁極位置検出手段の情報を簡単に確認する方法を提供する。
【解決手段】磁極位置情報を出力する磁極位置検出手段と、磁極位置情報から磁極位置表示データ情報を出力する表示データ作成手段と、前記磁極位置表示データ情報を表示するデータ表示手段とを有することを特徴としたモータ駆動装置とする。
(もっと読む)
1 - 20 / 124
[ Back to top ]