
Fターム[5H560DA00]の内容
無整流子電動機の制御 (40,007) | 位置検出(回転子) (3,428)
Fターム[5H560DA00]の下位に属するFターム
磁気的手段(エンコーダは除く) (911)
光学的手段(エンコーダは除く) (22)
エンコーダ、パルスジェネレータ (247)
レゾルバ (380)
近接スイッチ (3)
位置検出器を用いずに位置検出するもの (1,239)
その他の検出手段 (8)
検出系が複数組あるもの (25)
位置検出器の個数が1であるもの (99)
位置検出器の個数が2であるもの (39)
位置検出器の個数が3であるもの (119)
位置検出器の個数が4以上であるもの (13)
Fターム[5H560DA00]に分類される特許
61 - 80 / 323
モータ制御

【課題】出力信号における何らかのドリフトをモータ運動中に補償できる、ブラシレス・モータを監視する方法を提供する。
【解決手段】電流測定手段30を使用してモータ10の巻線1、2、3へ流入または流出する電流を監視して電流を表示する出力信号を生成し、電流測定手段を通して流れる瞬時電流が実質的にゼロと知られる時に電流測定手段の出力を測定し、実測定出力信号値と理想出力信号値の間の何らかの差を補償する修正出力信号を生成する各ステップを含む。
(もっと読む)
モータ制御装置、モータ制御システム、画像形成装置

【課題】制御用ICには変更を加えないか変更を最小限にして、ステッピングモータの制御信号をDCモータの制御信号に変換できるモータ制御装置等を提供すること。
【解決手段】STMの励磁方式、回転位置検出手段の分解能を励磁方式に応じて補正する分解能情報、及び、DCモータ89と被回転体のギヤ比情報、に応じて生成された前記前記回転速度指示情報に基づき、前記コントローラが生成したSTMの補正後制御信号を取得し、DCモータ89の目標位置を決定する目標値決定手段81と、回転位置検出手段の分解能に応じた単位回転量を前記被回転体の回転に応じてカウントして、DCモータの回転位置を決定する状態決定手段82と、目標位置と回転位置、又は、目標速度と回転速度、の少なくとも一方に基づき決定したDCモータの制御量に応じて、DCモータの回転速度を制御するPWM信号を生成するPWM信号制御手段83〜87とを有することを特徴とする。
(もっと読む)
電動機の制御装置
【課題】騒音の低下および制御性の安定を維持しつつ2相PWM制御を導入した電動機の制御装置を提供する。
【解決手段】電動機の制御装置は、パルス幅変調部245と、キャリア発生部270とを備える。パルス幅変調部245は、3相パルス幅変調と3相のうちの一相を固定し他の2相に対してパルス幅変調を行なう2相パルス幅変調とを切替えて実行する。キャリア発生部270は、パルス幅変調部245が2相パルス幅変調を実行する際のパルス信号に基づくスイッチング素子のスイッチング回数が、パルス幅変調部245が3相パルス幅変調を実行する際のスイッチング素子のスイッチング回数に近づくように、2相パルス幅変調実行時のキャリア信号Vcの周波数fcを調整する。
(もっと読む)
ブラシレスDCモーター駆動回路並びにブラシレスDCモーター並びに機器
【課題】インバーターの直流電圧の瞬時値に重畳される高圧のインバーターのスイッチングと低圧の制御回路のスイッチングに起因するノイズを直接除去し、モーターのトルクリップルを低減するブラシレスDCモーター駆動回路並びにこのブラシレスDCモーター駆動回路を内蔵し誘導電動機と同等の騒音性能と形状及びサイズを実現する。
【解決手段】PWM信号生成部10電源電圧変動の高次の周波数成分に対して有効な補正を行う。また、モーター構造体(筐体)29は整流回路2、インバーター主回路5、分圧回路、直流電圧検出部8、磁極位置センサー4、ローター位置検出部7、出力電圧演算部9、およびPWM信号生成部10を内蔵する。モーター構造体29の形状及びサイズは、同一出力の誘導電動機のそれとほぼ同じであるので、駆動回路を備えたブラシレスDCモーター並びにそれを搭載する機器の騒音の低減と小型化を図ることができる。
(もっと読む)
モーター駆動装置
【課題】振動又は騒音のような物理量とモーター(インバーター含む)の消費電力とを共に低減する、又は、いずれか一方が閾値以下という条件下でもう一方を最小化するモーター駆動装置を得る。
【解決手段】位相補正手段33は、残った位相補正パターンの中から電流値[A]が最小である位相補正パターンを選択し、その位相補正パターンにおける位相補正量[度]を、電流位相18に加算する位相補正量として設定する。
(もっと読む)
車両のモータ制御装置
【課題】車両に搭載された交流モータに流れる電流を検出する電流センサのゲイン誤差の影響を補正して、電流センサの出力に基づくモータ制御精度を向上させる。
【解決手段】交流モータ13の停止中に無効電流指令を行ったときのV相及びW相の電流指令値Iv ,Iw と電流センサ58,59の出力iv ,iw とに基づいて、電流センサ58,59のゲイン誤差の比(kv /kw )を算出するが、交流モータ13のロータ回転停止位置がIv 又はIw =0となる回転位置の場合には、交流モータ13の停止中でロック機構がロック状態のときにトルク発生電流指令を行い、このトルク発生電流指令を行ったときの電流指令値Iv ,Iw と電流センサ58,59の出力iv ,iw とに基づいて、電流センサ58,59のゲイン誤差の比(kv /kw )を算出する。このゲイン誤差の比を用いて電流センサ58,59の一方の出力を補正してゲイン誤差の不均衡を補正する。
(もっと読む)
電動パワーステアリング装置
【課題】ブラシレスモータの相間短絡を迅速に判定し、かつ、相間短絡が発生しても継続して操舵アシスト制御が可能な技術を提供する。
【解決手段】電動パワーステアリング装置は、相電流が、所定の短絡による過電流の状態と所定の回生による過電流の状態とを、交互に繰り返す発振状態に至ったと判定したときに、制御部51内に、前記短絡が発生したと判定する相間短絡判定部と、相間短絡判定部で判定された結果に基づき相間短絡発生相を検出し、この相間短絡発生相に接続されるスイッチング素子のデューティを制限してスイッチング素子の過電流発生を抑制し、操舵アシスト制御を継続して行う操舵アシスト制御部とを有する。
(もっと読む)
自動車のモータ制御装置
【課題】交流モータに流れる電流を検出する電流センサのゲイン誤差による電流検出値のずれを補正できるようにする。
【解決手段】交流モータ17の制御開始前の交流モータ17の停止中に、交流モータ17のトルク発生に寄与しない無効電流を交流モータ17に流すように指令する無効電流指令を行い、この無効電流指令を行ったときの指令電流ベクトル(Id ,Iq)からV相及びW相の電流指令値Iv ,Iw を求め、こられらのV相及びW相の電流指令値Iv ,Iw (実電流の代用情報)とV相及びW相の電流センサ38,39の出力(電流検出値iv ,iw )とからV相及びW相の電流センサ38,39のゲイン誤差kv ,kw を算出する。これらのゲイン誤差kv ,kw を用いて電流センサ38,39の出力を補正することで、電流センサ38,39のゲイン誤差による電流検出値iv ,iw のずれを補正する。
(もっと読む)
交流モータの制御装置
【課題】交流モータへの通電電流を電気角60度毎に転流させるために矩形波電圧を電気角60度毎にスイッチングする矩形波制御を精度良く行うことができるようにする。
【解決手段】回転位置センサ12の検出信号θr をデジタル化した標本電気角θesに基づいて電気角を判定して、交流モータ11に印加する矩形波電圧を電気角60度毎に転流させる矩形波制御を行う際に、電気角360度を3×2n で除算した値を量子化単位LSB[LSB=360/(3×2n )]とする分解能で回転位置センサ12の検出信号θr をデジタル化した標本電気角θesを用いる。これにより、電気角60度を量子化単位LSBの整数倍にすることができ、回転位置センサ12の検出信号θr をデジタル化した標本電気角θesの誤差の影響を受けずに、電気角60度を精度良く判定することができ、矩形波電圧を電気角60度毎にスイッチングする矩形波制御を精度良く行うことができる。
(もっと読む)
電動パワーステアリング装置
【課題】3相ブラシレスモータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続することができる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて電動モータ12を駆動する。その際、電気角θeが加速領域内にあるときには、3相ブラシレスモータ12の回転を操舵方向へ加速するべく異常時相電流指令値を増加減する補正を行う。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】ステアリングが高速回転等された場合であれ、好適な操舵感触を得ることができる電動パワーステアリング装置の制御装置を提供する。
【解決手段】弱め界磁制御の実行中において、弱め界磁条件(飽和率S>飽和率判定閾値Sh)が非成立である旨判断される場合であれ、ωI制御の実行中である旨判断されるときには、弱め界磁制御の実行を解除することなく継続して行う。このため、弱め界磁制御及びωI制御が交互に動作と実行を繰り返す、いわゆる制御の振動の発生が回避される。したがって、ステアリングの円滑な操舵が維持される。
(もっと読む)
ロータ位置予測および補間の機能を有する電子整流モータおよび方法
本発明はステータと特に永久磁石式のロータとを備えた電子整流モータに関する。この電気モータは制御ユニットを有し、制御ユニットはステータと作用結合しており、ステータがロータを回転させる回転磁界を発生させることができるように、ステータを整流する制御信号を生成する。電気モータはさらにロータの位置、特に角度位置を検出し、ロータ位置を表すロータ位置信号を生成する少なくとも1つのロータ位置センサを有する。制御ユニットはロータ位置信号に依存して制御信号を生成する。本発明によれば、制御ユニットはロータ位置信号をサンプリングおよび量子化し、サンプリングされ量子化されたロータ位置信号に対応する時間的なデータストリームを形成するデジタルロータ位置信号を生成する。制御ユニットは時間的に連続する2つのロータ位置値の間にある少なくとも1つの中間値をデジタルロータ位置信号内に形成する補間器を有する。 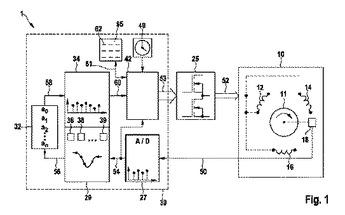 (もっと読む)
(もっと読む)
電動パワーステアリング装置
【課題】構成簡素且つ信頼性の高い異常判定を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】ECU11は、各マイコン18u,18v,18wが、それぞれ独立に、その対応相について相電流フィードバック制御を実行することにより、非結線モータであるモータ12の各相に対し、それぞれ独立に正弦波通電を行なう。また、これら各マイコン18u,18v,18wは、その対応相以外の二相について、それぞれ相電流指令値と実際の電流値との偏差を監視し、その偏差が所定の閾値を超える場合には、当該相に異常が生じたものと判定する。そして、ECU11は、各マイコン18u,18v,18wのうちの二つが、共に、残る一相に異常が発生したものと判定した場合には、当該相が異常である旨の判定を確定する。
(もっと読む)
三相ブラシレスDCモータ制御装置
【課題】ブラシ付DCモータと同じ制御装置を用いて可変速制御することを可能とする三相ブラシレスDCモータ制御装置を得る。
【解決手段】三相ブリッジ回路21aの出力を制御することにより三相ブラシレスDCモータ22を駆動制御する制御回路21bを備えた三相ブラシレスDCモータ制御装置であって、三相ブリッジ回路21aに用いる直流電圧を供給する単相ブリッジ回路12をさらに備え、制御回路21bは、外部から受信した回転方向信号52に基づいて、三相ブラシレスDCモータ22を駆動制御する。
(もっと読む)
ブラシレスモータ制御装置及びブラシレスモータ制御装置を搭載した電動パワーステアリング装置
【課題】ブラシレスモータの相間短絡を迅速に判定すること。
【解決手段】ブラシレスモータ制御装置50は、多相のブラシレスモータ43の各相に駆動電流を供給する各相のスイッチング素子TUU,TUL,TVU,TVL,TWU,TWLと、この各相のスイッチング素子をデューティ駆動する制御部51と、ブラシレスモータと各相のスイッチング素子との間を個別に接続した、各相の配線57a,57b,57cに流れる相電流を検出するための相電流検出部54を備える。制御部は、各相の配線同士に短絡が発生したことを判定する相間短絡判定部を備える。相間短絡判定部は、相電流が、所定の短絡による過電流の状態と所定の回生による過電流の状態とを、交互に繰り返す発振状態に至ったと判定したときに、短絡が発生したと判定する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】円滑なモータ回転及び高精度の電流検出を担保しつつ電圧利用率の改善を図ることのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、駆動回路において各相に対応する低電位側の各FETの何れかのオン時間が相電流値の検出時間よりも短くなる場合には、当該FETに対応する電流検出不能相以外の二相の相電流値に基づいて、その電流検出不能相の相電流値を推定する(ブラインド補正)。そして、そのブラインド補正による電流検出を実行する場合には、電流検出不能相に対応したスイッチングアームのスイッチング状態を保持するとともに、電流検出不能相以外の二相において各FETの作動により生ずる電力損失を補償するようなモータ制御信号を出力する。
(もっと読む)
電動機制御装置
【課題】 電動機のトルクリップル、振動・騒音の低減性能を向上し、また偏心量が経年変化した場合でもトルクリップル、振動・騒音低減性能を劣化させない電動機制御装置を提供する。
【解決手段】 電動機11は、各相の巻線をm線とし、各巻線をn分割としたp相m線n分割式の電動機である。電流指令部7は、目標設定部が設定した目標値からd/q軸電流指令値を演算する。電流指令補正部8は、前記電動機の複数の円環振動モードにおける複数次の高調波リップル成分を除去するように、回転角検出部2が検出した回転角に応じて、前記電流指令部7が算出したd/q軸電流指令値を補正し、p相m線n分割分の補正後d/q軸電流指令値を出力する。電流制御部9は、電流検出部4及び3相/2相変換部5から得られるm線n分割分の検出されたd/q軸電流が、前記補正後d/q軸電流指令値となるような駆動指令値を演算する。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】電源平滑用コンデンサの特性を考慮してモータ制御を高い精度で行う。
【解決手段】オープンループ制御部22は、dq軸上の指令電流id* 、iq* とモータの角速度ωe に基づき、モータの回路方程式に従いdq軸上の指令電圧vd 、vq を求める。dq軸/3相変換部23は、指令電圧vd 、vq を3相の指令電圧Vu 、Vv 、Vw に変換する。抵抗値算出部27は、温度センサ16で検出された電解コンデンサ15の周囲温度Tに基づき、電解コンデンサ15の等価抵抗の値RC を求める。3相電圧補正部24は、等価抵抗値RC に基づき、3相の指令電圧Vu 、Vv 、Vw を補正する。温度センサ16で検出された温度Tを積算し、温度積算値に基づき電解コンデンサ15の等価抵抗の値RC を求めてもよい。
(もっと読む)
モータドライバ制御装置、モータ制御装置、及び画像形成装置
【課題】 論理回路に安定したクロックを供給することが可能なモータドライバ制御装置、モータ制御装置、及び画像形成装置を提供することを課題とする。
【解決手段】 モータを駆動する複数のスイッチング素子の制御を行うモータドライバ制御装置であって、所定の周期の発振信号とパルス生成用信号とを比較することで生成された第1のパルス幅変調信号のデューティを制限し、第2のパルス幅変調信号を生成するデューティ制限手段と、前記第2のパルス幅変調信号をクロックとして動作する論理回路を含んで構成され、前記複数のスイッチング素子を制御する信号を生成するスイッチング素子制御信号生成手段と、を有することを要件とする。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】電源平滑用コンデンサを含む経路の抵抗値を検出してモータ制御を高い精度で行う。
【解決手段】オープンループ制御部22は、dq軸上の指令電流id* 、iq* とモータの角速度ωe に基づき、モータの回路方程式に従いdq軸上の指令電圧vd 、vq を求める。dq軸/3相変換部23は、指令電圧vd 、vq を3相の指令電圧Vu 、Vv 、Vw に変換する。3相電圧補正部24は、電圧センサ15で検出されたインバータ電圧値VI 、バッテリ電圧VB 、配線部のインダクタンスLに基づき、電解コンデンサ16を含む経路の抵抗値RC を求め、求めた抵抗値RC に基づき3相の指令電圧Vu 、Vv 、Vw を補正する。
(もっと読む)
61 - 80 / 323
[ Back to top ]