
Fターム[5H560DA00]の内容
無整流子電動機の制御 (40,007) | 位置検出(回転子) (3,428)
Fターム[5H560DA00]の下位に属するFターム
磁気的手段(エンコーダは除く) (911)
光学的手段(エンコーダは除く) (22)
エンコーダ、パルスジェネレータ (247)
レゾルバ (380)
近接スイッチ (3)
位置検出器を用いずに位置検出するもの (1,239)
その他の検出手段 (8)
検出系が複数組あるもの (25)
位置検出器の個数が1であるもの (99)
位置検出器の個数が2であるもの (39)
位置検出器の個数が3であるもの (119)
位置検出器の個数が4以上であるもの (13)
Fターム[5H560DA00]に分類される特許
21 - 40 / 323
回転機の制御装置およびその製造方法
【課題】電動機10の相電流を基本波とすべくインバータINVの出力電圧をフィードフォワード補正したのでは、電動機10のステータの巻線を鎖交する磁束が基本波からずれる場合には、トルク脈動を低減できないこと。
【解決手段】相殺電磁力出力部44は、鎖交磁束の基本波からのずれに起因した電磁力の歪を相殺する相殺電磁力についての、接線方向の相殺電磁力Fnθと、法線方向の相殺電磁力FnRと、軸線方向の相殺電磁力FnTとを各別に出力する。歪補正部36,38,40のそれぞれでは、これら相殺電磁力に応じた電圧を、制御量の制御のための操作量(指令電圧vur,vvr,vwr)に重畳する。
(もっと読む)
回転機の制御装置

【課題】半波整流を行なう際に中性点の電位を操作したのでは、各相の巻線が有効利用されているとはいい難いこと。
【解決手段】スイッチング素子Sup、Svp,Swnがオンとなる場合、スイッチング素子Snnがオン且つスイッチング素子Snpがオフとされる。ここで、スイッチング素子Snp,Snnの操作がなされないなら、スイッチング素子Sup、Svp,Swnがオンとなることで、固定子巻線の接続点の電位(中性点電位)は、「VDC/2」よりも高くなる。これに対し、スイッチング素子Snnをオンとすると、中性点電位は、「0」となる。このため、スイッチング素子Sup,Svpに流れる電流が増大し、ひいてはモータジェネレータ10に流れる電流が増大することで、スイッチング素子Snnによって中性点電位を操作しない場合と比較して、モータジェネレータのトルクが大きくなる。
(もっと読む)
自動扉制御装置、自動扉システム、自動扉制御方法及び自動扉調整方法
【課題】自動扉が傾いた場所に設置された場合であっても、扉の開動作及び閉動作を所定の時間で行うことができる自動扉制御装置、自動扉システム、自動扉制御方法及び自動扉調整方法を提供する。
【解決手段】モータ駆動装置29の駆動制御部41は、カウンタ部44の記憶部Cnt2A、Cnt2B、Cnt4に予め設定された切替条件に従って、移動速度を切り替えながら自動扉の開又は閉動作を行い、自動扉の移動開始位置から移動停止位置までの移動時間をタイマ部45にて測定する。測定した移動時間が仕様などに規定された所定時間より短い/長い場合、減速開始点補正部46にて自動扉の高速移動から減速移動への切り替えを早める/遅らせるよう、切替条件の変更を行う。
(もっと読む)
電動機の制御装置
【課題】電動機の制御装置のブートストラップ回路への充電に対して、回路損失を抑えようとすると充電時間がかかり、充電時間を早めようとすると回路損失を増やす、もしくは電源容量が大きなものとなるという課題を有していた。
【解決手段】ブートストラップ回路106への充電に対して、各相への充電を所定時間ずらして段階的に充電を行なうことにより、第1相充電時に電動機101を制限抵抗として介した他相への充電を利用し、突入電流を抑制することができる。その結果、回路の小型化が可能となり、また、回路損失を抑えつつ、充電時間を早めることができる。
(もっと読む)
ブラシレスモータ及びその制御方法
【課題】簡単な回路構成にして、インバータの一部が故障して多相の巻線のうちの1相が損傷したり、多相の巻線のうちの1相が故障したりした場合でも、電流欠損分を補うことのできるブラシレスモータを提供する。
【解決手段】電源の中性点(6a)と巻線における星型結線の中性点(2a)とを接続する中性線(8)と、複数相の巻線のうち、いずれかの相の故障を検出する故障検出手段(9)と、故障検出手段でいずれかの相の故障が検出された場合に、演算処理装置に入力された故障検出情報から相毎に故障の有無を判別する故障相判別手段と、故障相判別手段で故障なしと判別された各相の電流をX軸及びY軸直交成分に分解して合成した合成電流の電流ベクトルの軌跡が略円となるように、各相の電流の位相を変化させる位相制御手段とを備える。
(もっと読む)
同期モータの磁極位置を検出する検出装置およびこれを備える制御装置
【課題】d相電流指令およびq相電流指令に基づいて回転が制御される磁極位置センサを有しない同期モータに対して、磁極補正値を高精度かつ短時間に検出することができる検出装置およびこれを備える制御装置を実現する。
【解決手段】d相電流指令およびq相電流指令に基づいて制御される同期モータ2の磁極位置を検出する検出装置1は、同期モータ2の電源投入時における磁極初期位置の検出後に、所定のd相電流指令を与えて同期モータ2を正転および逆転させたときにそれぞれ生成される同期モータ2を回転させるための正転時d相電圧指令と逆転時d相電圧指令との差に基づいて磁極補正値を生成する生成手段11と、磁極補正値と同期モータ2のセンサの基準位置であるセンサ基準位置とに基づいて、磁極初期位置を補正する補正手段12と、を備え、制御装置100は、この検出装置1を備え、補正後の磁極初期位置に基づいて同期モータ2の回転を制御する。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】目標停止位置に精度良く、短時間で停止させることができるモータ制御装置及びモータ制御方法を提供すること。
【解決手段】モータ制御装置は、回転センサ11で検出した検出回転速度と検出回転量とに基づいて目標停止位置でモータMを停止させるための制御部12を備える。制御部12は、そのときの検出回転速度に基づいて最大制動状態としたときの最大制動回転量を算出し、その最大制動回転量が、目標停止位置とそのときの検出回転量とに基づいた目標停止位置までの残り回転量と一致すると最大制動状態とする電力をモータMに供給し最大制動制御を行い、その後、目標停止位置とそのときの検出回転量とに基づいた目標停止位置までの残り回転量とそのときの検出回転速度とに基づいて目標停止位置でモータMが停止する回転速度を算出しその算出した回転速度となるように制動力を生じさせる電力をモータMに供給する動作を繰り返す速度制御を行う。
(もっと読む)
モータの駆動制御装置
【課題】構成が比較的に簡素であって、演算処理における回路構成および処理プロセスを簡素化でき、モータの高精度な駆動制御を行うことができるモータの駆動制御装置を提供する。
【解決手段】モータの駆動制御装置1は、進角指令情報5及び速度指令情報6などの2つの動作指令情報が入力される信号合成部4と、指令情報復元処理部8と、駆動信号生成部9と、出力部10とを有し、出力部10からモータ2に電力を供給する。信号合成部4は、パルス信号の周波数情報とデューティ情報とを合成した複合指令信号S1を出力する。複合指令信号S1は、1つの伝送経路7を介して指令情報復元処理部8に入力される。指令情報復元処理部8は、複合指令信号S1の周波数情報及びデューティ情報に基づいて2つの動作指令情報を復元する。復元された情報に基づいて、駆動信号生成部9から出力部10に駆動信号S6が出力され、駆動信号S6に応じて、出力部10がモータ2を駆動する。
(もっと読む)
電動工具
【課題】 力率改善回路を備えずに力率を改善することのできる電動工具を提供する。
【解決手段】 電動工具1は、複数の固定子巻線U、V、Wを有し、電圧が印加された場合に所定の誘起起電圧が発生するブラシレスモータ5と、交流電圧を整流する整流回路10と、整流された交流電圧を、誘起起電圧よりも小さな最小値を有する脈動電圧に平滑する平滑コンデンサ11と、スイッチング動作を行うことにより脈動電圧を固定子巻線U、V、Wに順次出力するインバータ回路8と、を備えたことを特徴としている。
(もっと読む)
電気機械装置、移動体、ロボット及び電気機械装置の温度測定法
【課題】電磁コイルの近傍に別個の温度取得手段を取り付けることなく、電気機械装置や電磁コイルの温度を測定する。
【解決手段】電気機械装置10であって、永久磁石200と、電磁コイル100Aと、前記永久磁石の電気角を検知するためのセンサー300と、前記センサーからの信号に基づいて前記電磁コイルをPWM駆動する制御部(240、400)と、前記電気機械装置の温度測定時に前記電磁コイルと直列に接続される抵抗器715と、を備え、前記制御部は、前記駆動部が前記PWM駆動において前記電磁コイルに駆動電圧を印加しない期間において、前記電気抵抗の両端の電圧を測定し、前記電圧を用いて前記電磁コイルの電気抵抗を取得し、前記電磁コイルの電気抵抗を用いて前記電磁コイルの温度を取得する。
(もっと読む)
電力変換装置
【課題】トルク制御動作において、モータ電流の上昇を確実に検出できる電力変換装置を提案する。
【解決手段】交流電源(6)側からの電力を複数のスイッチング素子(Sr,Ss,St,Su,Sv,Sw,Sx,Sy,Sz)のスイッチング動作によって所定の周波数の交流電力に変換し、該交流電力をモータ(5)に出力する変換部(20)を設ける。モータ(5)の出力トルクが、交流電源(6)の出力電圧の周波数の整数倍の脈動成分である電源脈動成分を含み、且つモータ(5)の負荷トルク変動に応じて変動するようにトルク制御動作を行うとともに、電源脈動成分のピークと負荷トルク変動成分のピークとのタイミングが一致もしくは略一致したときのピーク電流値を求め、該ピーク電流値が所定の上限値を超えないように、出力トルクの変動幅を低減させる制御部(40)を設ける。
(もっと読む)
電動パワーステアリング装置
【課題】モータ駆動回路のMOS−FETの保護手段が異常となっても、モータ駆動回路のMOS−FETの動作を確実に停止できる電動パワーステアリング装置を提供する。
【解決手段】モータ駆動中にトランジスタ31の出力の短絡故障が検出されると、マイコン5はイネーブル信号ENBをオフし、FET20がオフ状態となることによって、モータ駆動回路7のMOS−FET(U2)のゲートがプリドライバ6のモータ駆動信号から遮断される。同時に、MOS−FET(U2)のゲート電荷は抵抗32,30,トランジスタ31のコレクタ−エミッタを通して放電されることによってゲート電圧が低下し、MOS−FET(U2)を短時間でオフできる
(もっと読む)
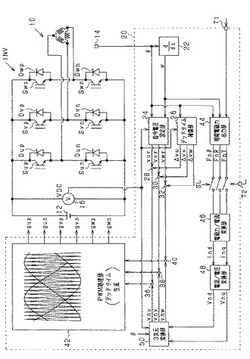
ブラシレスDCモーター、及び機器
【課題】ほぼ同一の出力を持つ誘導電動機と同等の騒音性能と形状及びサイズを実現するブラシレスDCモーター、及びこのブラシレスDCモーターを搭載する機器を得る。
【解決手段】PWM信号生成部10電源電圧変動の高次の周波数成分に対して有効な補正を行う。また、モーター構造体(筐体)29は整流回路2、インバーター主回路5、分圧回路、直流電圧検出部8、磁極位置センサー4、ローター位置検出部7、出力電圧演算部9、およびPWM信号生成部10を内蔵する。モーター構造体29の形状及びサイズは、同一出力の誘導電動機のそれとほぼ同じであるので、駆動回路を備えたブラシレスDCモーター並びにそれを搭載する機器の騒音の低減と小型化を図ることができる。
(もっと読む)
車両のモータ制御装置
【課題】交流モータを駆動する3相電圧型のインバータの1つのスイッチング素子の短絡故障が発生した場合でも、交流モータのトルクを制御できるようにする。
【解決手段】インバータ19の各相のスイッチング素子35〜40のうちの1つのスイッチング素子の短絡故障が発生したときに、短絡故障の発生時に使用可能な有効電圧ベクトルに対応する電気角区間(2相変調可能な電気角区間)では、短絡故障が発生した相以外の残りの2相のスイッチング素子のオン/オフを制御する2相変調で電圧制御して交流モータ12のトルクを制御するようにインバータ19を制御し、2相変調可能な電気角区間以外の電気角区間(1相変調可能な電気角区間)では、短絡故障が発生した相以外の残りの2相のうちのいずれか1相のスイッチング素子のオン/オフを制御する1相変調で電圧制御するようにインバータ19を制御する「2相及び1相変調制御」を実行する。
(もっと読む)
駆動装置の制御装置
【課題】可変磁束型回転電機を備えた駆動装置を制御する制御装置の規模を増大させることなく、誘起電圧をインバータの耐圧の限度内に収めることができる技術を提供する。
【解決手段】永久磁石を備えたロータとコイルを備えたステータとを有する回転電機と、ロータから供給される界磁束を変化させる界磁調整機構と、コイルに接続されたインバータとを備えた駆動装置を制御する駆動装置の制御装置は、コイルに誘起される誘起電圧がインバータの耐圧Vmaxを越えない範囲内でロータの回転速度に応じて設定された界磁制限値Blmtを上限として、少なくとも回転速度に基づいて界磁調整機構により調整される界磁束の目標となる界磁指令値を決定する。
(もっと読む)
電動パワーステアリング装置
【課題】
モータを駆動する各相電流指令値のゼロクロス時においても、モータからの異音の発生することがなく、且つ操舵フィーリングの良い電動パワーステアリング装置を提供すること。
【解決手段】
回転角補正演算手段は、モータの回転角が所定範囲内にあり、モータの回転角が所定範囲内で増加している場合には、モータの回転角を、モータの回転角の所定範囲内の最大値に固定し、モータの回転角が所定範囲内で減少している場合には、モータの回転角を、モータの回転角の所定範囲内の最小値に固定する。
(もっと読む)
車両用回転電機の駆動制御装置
【課題】車両が停車又は低速走行しているときにおいて、特に過変調電流制御のキャリアに起因する騒音を十分に低減することが可能な車両用回転電機の駆動制御装置を提供することである。
【解決手段】駆動制御装置20は、キャリアに起因する騒音を低減する騒音抑制制御部30として、車速が予め定められた所定速度以下であるか否かを判定する車速判定モジュール31と、動作点が過変調電流制御領域内および特定実施領域内であるか否かを判定する動作点判定モジュール32と、車速が所定速度以下であり且つ動作点が過変調電流制御領域内および特定実施領域内であると判定されたときに、弱め界磁電流を流して動作点を特定実施領域外の正弦波電流制御領域にシフトさせる弱め界磁制御モジュール33と、キャリア周波数変更モジュール34とを有する。
(もっと読む)
電動パワーステアリング装置
【課題】モータを駆動する各相電流指令値のゼロクロス時においても、モータからの振動及び異音が発生することがなく、操舵フィーリングの良い電動パワーステアリング装置を提供すること。
【解決手段】デッドタイム補償演算手段は、各相電流指令値がゼロ近傍の所定範囲内にある場合には、モータの回転角速度に応じて各相のデッドタイム補償量を変え、回転角速度の絶対値が所定値より小さい場合には、回転角速度の絶対値が小さくなるに従い、各相のデッドタイム補償量を漸減させる。
(もっと読む)
可変磁束ドライブシステム
【課題】可変磁束モータを駆動する可変磁束ドライブシステムにあって、可変磁石の磁束の繰り返し精度を改善し、トルク精度を向上する。
【解決手段】永久磁石を用いた永久磁石電動機1と、永久磁石電動機を駆動するインバータ4と、永久磁石の磁束を制御するための磁化電流を流す磁化手段とを備え、永久磁石はその磁束密度がインバータ4からの磁化電流によって可変できる可変磁石であり、磁化手段は、可変磁石の磁性体の磁化飽和領域以上の磁化電流を流すことを特徴とする可変磁束ドライブシステム。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】多相モータの各相の電流の位相遅れをそれぞれ補正するモータ制御装置を提供することである。
【解決手段】多相モータに接続され、直流電力を交流電力に変換する電力変換手段と、多相モータの少なくとも2相の相電流をそれぞれ検出する複数の電流検出手段と、多相モータの各相の相電流の位相遅れ量をそれぞれ設定する位相遅れ量設定手段と、複数の電流検出手段により検出された2相の相電流を含む、前記各相の固定座標系の相電流を回転座標系の電流に変換する座標変換手段と、座標変換手段により変換された回転座標系の電流と、外部から入力される多相モータの出力目標値に基づいて、電力変換手段を制御する制御手段とを備え、座標変換手段は、位相遅れ量設定手段により設定された各相の位相遅れ量に基づき各相に対応する複数の補正値を設定し、複数の補正値を用いて固定座標系の相電流を回転座標系の電流に変換する。
(もっと読む)
21 - 40 / 323
[ Back to top ]