
Fターム[5H572GG02]の内容
Fターム[5H572GG02]の下位に属するFターム
Fターム[5H572GG02]に分類される特許
1 - 20 / 160
ハイブリッド車
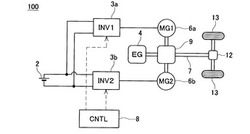
【課題】走行中にモータのインバータの出力の1相が制御不能になった場合であっても長時間走行することのできるハイブリッド車を提供する。
【解決手段】ハイブリッド車100の第1モータ6aは、ギアセットを介してエンジン4と連動するとともに、セルモータと発電機を兼ねている。第2モータ6bは、ギアセットを介してエンジンと連動するとともに、車輪にトルクを伝達するギアセット出力軸に係合している。コントローラ8は、HVモードで走行中に、第1インバータの3相出力のうちの1相が制御不能の場合、第1インバータの3相出力を用いたモータ制御を停止するとともにエンジンを停止して第2モータだけで走行するEVモードへ移行する。次いでコントローラ8は、2相出力で第1モータを駆動するための駆動信号を第1インバータの制御可能な2相のスイッチング回路に与えて第1モータを駆動してエンジンを始動して再びHVモードに移行する。
(もっと読む)
サーボドライブシステム

【課題】 サーボ制御の制御応答性を高め、制御装置の各軸の特性に応じて、制御演算部をサーボアンプ又はサーボコントローラに分配可能なサーボドライブシステムを提供する。
【解決手段】 本発明のサーボドライブシステムは、軸毎にサーボモータを制御するサーボ制御部が、サーボモータの指令を生成するプロファイル生成部と、サーボモータの位置を制御する位置制御部と、サーボモータの速度を制御する速度制御部と、サーボモータのモータ電流を制御する電流制御部と、を有し、プロファイル生成部、位置制御部、速度制御部及び電流制御部は、軸毎にサーボアンプ又はサーボコントローラにそれぞれ分配されている。
(もっと読む)
モータ制御装置
【課題】同時に加速または減速する場合が高い頻度で発生する複数のモータを、共通電源の電源容量を増加させずに、サイクルタイムを減少させるような適切な加減速条件で動作させることができるモータ制御装置を得ること。
【解決手段】加減速パラメータ設定部3aは、電源供給部2から全モータに供給できる電力である供給可能電力の制限値または電源供給部2が全モータからの回生電力を処理できる電力である回生可能電力の制限値の範囲内で、動作指令8に含まれる指令移動量及び指令速度に基づき、2以上のモータのそれぞれに対する加減速パラメータ9を算出し、加減速処理部4aに設定する。
(もっと読む)
シート搬送装置、画像形成装置、駆動制御プログラム及びシート搬送モータ制御システム
【課題】各回転体の回転を適切に制御し、3つ以上の互いに干渉し合う回転体の干渉を低減させることが可能とする。
【解決手段】第1の回転体と第2の回転体と第3の回転体とを有し、前記第1の回転体ないし第3の回転体のうち少なくとも何れか一つの回転体によりシート状媒体の搬送を行うシート搬送装置であって、前記第1の回転体を回転させる第1のモータの駆動を制御する第1制御要素を検出する第1検出手段と、前記第2の回転体を回転させる第2のモータの駆動を制御する第2制御要素を検出する第2検出手段と、前記第3の回転体を回転させる第3のモータの回転速度を制御するモータ制御手段と、前記第1制御要素と前記第2制御要素との和に基づき前記モータ制御手段に前記第3のモータの回転速度の変更を指示する速度制御手段と、を有する。
(もっと読む)
一つの被駆動体を二つの電動機で駆動させる制御装置
【課題】二つの電動機間の機動力が互いに干渉することによって生じうる振動を抑制するために、二つのプロセッサで二つの電動機を制御することができる制御装置を提供する。
【解決手段】DSP11aは、取得した回転サーボモータ3aの速度値をDSP11bに送信するとともに回転サーボモータ3bの速度値をDSP11bから受信し、回転サーボモータ3aへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。DSP11bは、取得した回転サーボモータ3bの速度値をDSP11aに送信するとともに回転サーボモータ3aの速度値をDSP11aから受信し、回転サーボモータ3bへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。
(もっと読む)
モータ制御システム、制御装置、並びにモータ内蔵ローラと制御装置の組み合わせ
【課題】2以上のモータが強制的に同期させられる場合において、各モータへの供給電流のアンバランスを抑制可能なモータ制御システム、制御装置、並びにモータ内蔵ローラと制御装置の組み合わせを提供することである。
【解決手段】モータ制御システム1は、モータ内蔵ローラ2と、コントローラ(制御装置)6,7の組み合わせからなるものである。モータ内蔵ローラ2は、ローラ本体3とモータ4,5を有している。モータ4,5は、出力軸同士がローラ本体3で一体的に連結されており、モータ4,5は、強制的に同期運転するものである。モータ4,5の回転数に応じてコントローラ6,7から供給する電流パルスに下限が設定されている。
(もっと読む)
制御装置、制御方法、及びプログラム
【課題】モータの高効率なトルク制御を可能にして、エネルギーの無駄を小さく抑えることの可能な制御装置を提供する。
【解決手段】制御装置4は、第1条件判断器16と、第2条件判断器17と、第1加算器20と、第2加算器21とを有する。第1,第2条件判断器16,17は、それぞれ、速度指令が示す角速度を条件として、第1,第2モータ5,6の出力トルクを設定するための第1,第2補正乗数を求める。第1加算器20は、前記角速度に第1補正乗数を乗じた値と、第1のトルク値とを加算することで第1モータ5の出力トルクを求めて、出力トルクを示す第1モータ5の駆動信号を出力する。第2加算器21は、前記角速度に第2補正乗数を乗じた値と、第1のトルク値と正負が反対である第2のトルク値とを加算することで、第2モータ6の出力トルクを求めて、該出力トルクを示す第2モータ6の駆動信号を出力する。
(もっと読む)
電気車制御装置
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更が不要で、加速度センサを用いることなく車体の振動乗り心地を改善する。
【解決手段】台車6に装荷された2台の電動機61がそれぞれ歯車を内蔵した駆動装置を介して2組の車輪を駆動することにより走行する電気車両であり、2台の電動機に逆方向のトルク変動を重畳することにより台車の上下振動を抑制し間接的に車体の振動抑制制御を行う電気車制御装置において、電気車制御装置の振動抑制制御は2台の電動機に逆方向の振動トルクを加えた際の台車の上下振動特性と2台の電動機に逆方向の振動トルクを加えた際の2台の電動機の回転速度差の振動特性をもとに構築され、2台の電動機の回転速度差情報を用いて台車振動を抑制する。
(もっと読む)
送風装置及び電子機器
【課題】冷却能力を高めるために複数のファンを用いて筐体を冷却する送風装置において、ファンから発せられるノイズを抑制することができる送風装置及び電子機器を提供する。
【解決手段】送風装置は、第1のファン11と、第2のファン12とを含む複数のファンを具備し、前記第1のファン11、及び第2のファン12は互いに異なる複数のフィン13a,14aを有し、少なくとも、前記一方のファンのフィン数は素数であり、前記第1のファン11と第2のファン12とは異なる回転数で駆動する。
(もっと読む)
モータ制御装置
【課題】電力計等の専用の測定機器を用いることなしに、正確に消費電力の計測を可能にする抵抗回生方式のモータ制御装置を得ること。
【解決手段】抵抗回生方式のモータ制御装置において、モータに流れる電流に基づき該モータに発生するトルクもしくは推力を算出するトルク・推力算出部と、前記モータに流れる電流とモータ速度との一方または両方に基づき損失Lを算出し、前記モータ速度と前記トルク・推力算出部が算出したトルクもしくは推力との積から出力Wを算出し、瞬時電力Pを、損失Lと出力Wとの和L+Wが、L+W≧0のときはP=L+Wと算出し、L+W<0のときはP=0と算出する電力算出部とを備えた。
(もっと読む)
ドラム式洗濯機
【課題】インバータ回路に供給する直流電圧を、ドラムモータの目標回転数Ntと現在回転数Npの差に応じた適切な条件で昇圧制御することが可能なモータ駆動装置を備える。
【解決手段】ドラムモータ7を駆動制御する第1インバータ回路25には、整流回路36から平滑用コンデンサ37、38を介して出力される直流電圧Vdが印加される。第1インバータ回路を駆動する制御部30は、少なくとも脱水工程の一部期間において、短絡制御素子を導通させる短絡信号を交流電源電圧のゼロクロス検出点を起点として生成し、短絡信号のパルス幅Twを、ドラムモータの目標回転数Ntと現在回転数Npの差に応じて設定された直流電圧Vdの目標電圧Vt、及び直流電圧Vdの検出値に基づいて設定する。
(もっと読む)
同期制御装置と同期制御方法
【課題】
複数の駆動系を同期制御する汎用性のある手法を提供する。
【構成】
複数の駆動系を目標指令に従って動作させるため、第1の駆動系に対し第1の操作量を発生させ、第2の駆動系に対し第2の操作量を発生させる。第1の駆動系での目標指令からの誤差と、第2の駆動系での目標指令からの誤差との偏差に比例する同期制御用の操作量を発生させ、第1の操作量に同期制御用の操作量を加算し、第1の駆動系を制御する。また第2の操作量に同期制御用の操作量を加算し、第2の駆動系を制御する。
(もっと読む)
モーター停止用の制御装置
【課題】複数のモーターが使用されているプロセスラインにおいて、連続材の破断を防止し、緊急時に、ラインの停止を早期に実現することができるモーター停止用の制御装置を提供する。
【解決手段】本制御装置は、ペイオフリール及びテンションリールの各コイル径情報と各モーターの回転数情報とが入力される入力部17と、各モーターの定格と各機械部の慣性モーメントとが予め記録された記録部18とを備える。停止時間演算部19は、各モーターについて、その時点におけるトルクで回生制動を実施した場合の停止時間を演算する。また、トルク制限値演算部20は、最大停止時間に合わせて停止させるためのトルク制限値を、各モーターについて演算する。そして、非常停止指令が入力されると、出力部21は、上記各トルク制限値を出力し、そのトルク制限値でトルク制限した回生制動を行わせる。
(もっと読む)
モータ制御装置
【課題】応答性がよく、安定したタンデム制御によるモータ制御を行なうことができるモータ制御装置を提供する。
【解決手段】マスタ軸モータと少なくとも一つのスレーブ軸モータとを用いて、一つの軸を駆動するタンデム方式のモータ制御装置であって、モータ毎に位置制御部1と速度制御部2と電流制御部3とを具備し、さらにスレーブ軸にはマスタ軸のトルク指令値Tm*とスレーブ軸のトルク指令値とからスレーブ軸の調停トルク指令値Ts1*を算出するトルク調停部5と、スレーブ軸には上位制御装置からの指令の反転を検出する指令反転検出部23と、を備え、指令反転検出部23は、上位制御装置からの指令の反転を検出した場合、指令反転直前の調停トルク指令値Ts1*をスレーブ軸の速度制御部2の積分成分に設定することにより達成される。
(もっと読む)
印刷装置
【課題】本発明はDCブラシレスモータを使用する印刷装置に関し、特に転写ベルトへのスジ状のトナーの付着を防止し、用紙にバンド状の画像障害を生じさせることのない印刷装置、及び印刷装置の駆動制御方法を提供するものである。
【解決手段】回転駆動部を駆動するDCブラシレスモータを使用した印刷装置であって、上記DCブラシレスモータの回転磁界を検出する磁気検出手段と、この磁気検出手段の検出信号に基づいて、上記DCブラシレスモータの駆動を制御し、上記回転駆動部の駆動及び停止制御を行う制御手段とを有することを特徴とする。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】エンジンおよび、エンジンと動力分割機構を介して接続されたモータを備えるハイブリッド車両において、モータ異常発生時に、エンジン始動に伴なう反力による駆動力の変動を抑制してエンジンを用いた退避走行を可能とする。
【解決手段】第2の電動機の異常発生時には、第2の電動機の運転を停止させるとともに、エンジンおよび第1の電動機を用いた退避走行を実行させる。制御装置は、第2の電動機の異常発生が検知された場合に、第1の電動機からの動力により動力分割機構を介してエンジンを回転駆動することにより、エンジンを始動させる。また、制御装置は、第2の電動機に接続されるインバータのスイッチング素子を所定のスイッチングパターンに従ってオン・オフさせることによって運転停止中の第2の電動機から電磁気的な作用に基づく引きずりトルクを発生させることによりエンジン始動時に出力部材に生じる反力を相殺する。
(もっと読む)
ハイブリッド式作業機械
【課題】複数の電動モータの負荷が同時に変動しても、電動モータの出力の変化を防ぐことができるハイブリッド式作業機械を提供する。
【解決手段】ハイブリッド式作業機械は、第1,第2,第3電動モータ5A,5B,5Cの電動モータ出力の変化量の総和が予め設定された設定値以下となるように、電動モータ5A,5B,5Cの電動モータ出力の変化量を制限する電動モータ出力指令変化量リミット部,電流制御部を備えている。これにより、第1,第2,第3電動モータ5A,5B,5Cの負荷が同時に変動しても、第1,第2,第3インバータ4A,4B,4Cに供給される直流電流の総和の変化量を低く抑えることができる。その結果、バスライン8の電圧の変動を低減できる。
(もっと読む)
プリンタの制御装置
【課題】複数のモータが駆動源として存在する駆動制御系において、コギングトルクリップルの影響を抑制し、速度変動等の影響を受け難いプリンタの制御装置を提供することを目的とする。
【解決手段】第1のモータ、第2のモータのそれぞれのコギングトルクリップルを抑制する補正値を加算した第1のフィードフォワード制御系と第2のフィードフォワード制御系とを設け、フィードバック制御系と上記第1のフィードフォワード制御系と上記第2のフィードフォワード制御系との組み合わせと、上記フィードバック制御系と第1のフィードフォワード制御系との組み合わせと、上記フィードバック制御系と上記第2のフィードフォワード制御系との組み合わせとのいずれかを選択する。
(もっと読む)
延伸装置の制御方法
【課題】延伸装置において、手動介入後の自動運転復帰で、各セクションの速度到達時刻がバラツキ、製品の延伸率にバラツキがでるため、製品むらが大きくなっていた。
【解決手段】延伸装置において、複数の延伸ロールは各々が増減速機を介して電動機によって駆動され、前記各電動機は駆動電流を検出する電流検出器と回転速度を検出する回転速度検出器を備え、前記電流検出器および前記回転速度検出器の検出信号はそれぞれ前記各電動機の駆動制御を行う駆動制御器に入力され、前記駆動制御器には延伸制御器から各延伸ロールの回転速度制御信号が入力されており、前記駆動制御器は前記回転速度制御信号に基づいて電動機の回転制御を行い、手動介入後の自動運転復帰時には、各延伸ロールの回転速度および加減速度は再計算され、設定速度到達時間の最も遅いものの設定速度到達時刻に、各延伸ロールが同時に設定速度に達するように設定されていることを特徴とする。
(もっと読む)
モーター駆動装置、モーター駆動方法およびプログラム
【課題】複数のモーターにより一連の作業を実行する機器における最大駆動電流を制限することのできるモーター駆動装置、モーター駆動方法およびプログラムを提供する。
【解決手段】複数のモーター(13−1,13−2,13−3,…)と、これらのモーターにそれぞれ駆動電流を供給する電流源(11)と、電流源(11)から複数のモーターに供給される電流値の制限値を設定する電流制限部(13−1,13−2,13−3,…)および駆動制御部(16)とを備え、駆動制御部は、複数のモーターの各々に対して、そのモーターが行おうとする作業ごとに、その作業に必要なトルクに対応して、そのモーターに供給される電流値の制限値を電流制限部に設定する。
(もっと読む)
1 - 20 / 160
[ Back to top ]