
Fターム[5J062BB02]の内容
Fターム[5J062BB02]に分類される特許
21 - 40 / 131
測位支援装置
【課題】本発明は、衛星航法に基づく測位系において、航行衛星の位置、速度、加速度の何れかに生じる欠落を補完する測位支援装置に関し、地形や地物の分布に柔軟に適応し、かつ精度よく安定にリアルタイムによる測位を可能とすることを目的とする。
【解決手段】軌道データで時系列tの順に定まる航行衛星の速度Vt を蓄積するログ手段と、前記航行衛星の速度vt0と、前記速度vt0に対する誤差が所定の範囲内にある速度vt1〜vtnとを得る候補取得手段と、前記速度vt0、vt1〜vtnの内、前記時系列tの順に前記航行衛星に作用する外力Ftと前記航行衛星の質量mとの比の前記時系列tの逆順における積分の結果との和の前記ログ手段に先行して蓄積された所定の数Nの速度Vtに対する偏差が規定の範囲内にあり、あるいは最小である特定の速度で前記航行衛星の速度を補完する補完手段とを備える。
(もっと読む)
航法支援装置

【課題】本発明は、複数のフィルタを併用することにより目標の位置、距離、速度、方位の何れかを得る航法支援装置に関し、構成が大幅に複雑化することなく、精度を高めることを目的とする。
【解決手段】目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う複数N個のフィルタと、前記目標の特徴を得る特徴識別手段と、前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する重み設定手段と、前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る重み付け手段とを備える。
(もっと読む)
監視局、制御方法、広域補強システム、および制御プログラム
【課題】 広域補強システムを構成する監視局を、移動する物体に設置することが可能な監視局、制御方法、広域補強システム、および制御プログラムを提供する。
【解決手段】 広域補強システムの監視局は、自監視局の位置を検出し、位置情報として出力する検出手段と、入力された前記位置情報を送信する送信手段とを備える。
(もっと読む)
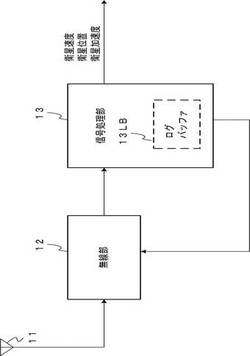
船舶識別装置
【課題】大規模な処理装置等を実装することなく、他の船舶に成りすましている不審船を検出することができるとともに、精度よく船舶の個体識別を行うことができるようにする。
【解決手段】信号特性照合部17により信号特性が合致していると判定された場合、AIS受信機14により受信されたAIS信号を発信しているAIS装置が搭載されている船舶については利用者IDに係る船舶であると判別し、信号特性照合部17により信号特性が合致していないと判定された場合、あるいは、その利用者IDがデータベース15に登録されていない場合、上記AIS装置が搭載されている船舶については不審船であると判別する。
(もっと読む)
GNSS受信機、航法装置、信号処理装置、GNSS速度補正プログラム及びGNSS速度補正方法
【課題】アンテナの動揺による速度測定値の誤差を遅延無く除去することが可能であり、しかも特別な設定作業等を行う必要が無いGNSS受信機を提供する。
【解決手段】本実施形態のGPS受信機2は、GPSアンテナ4と、GNSS位置・速度算出部11と、磁気方位センサ5と、傾斜センサ6と、動揺速度除去部15と、を備えている。GPSアンテナ4は、船舶に取り付けられ、GPS衛星からの測位用信号を受信する。GPS位置・速度算出部11は、測位用信号に基づいて、GPS速度を算出する。磁気方位センサ5は、船舶の船首方向の絶対方位を検出する。傾斜センサ6は、GPSアンテナ4の傾斜角を検出する。動揺速度除去部15は、絶対方位及び傾斜角に基づいて、GPSアンテナ4の動揺による誤差を算出してGPS速度から除去する。
(もっと読む)
船舶用衛星通信装置のGPS信号受信手段
【課題】
GPS受信機のアンテナの指向方向に船舶搭載物などの構造物が存在した時に、これが遮蔽物となってGPS衛星からの信号を受信出来ないブロッキング状態になってしまう課題があった。
【解決手段】
通信用アンテナとGPSアンテナが回転装置に固定され、それぞれの位置関係が一定である設置をする場合において、前記船舶用衛星通信船上装置を装備する際に、該船上の構造物の遮蔽によって、GPS衛星からの信号をGPSアンテナが受信できなくなる通信用アンテナの方位角をデータベース化して記憶装置に格納しておく手段と、GPSアンテナがGPS衛星からの信号を受信する際に、通信用アンテナの方位角が前記データベースによって記載された範囲内であった場合には、通信用アンテナとGPSアンテナを水平面で回転させることによって、GPSアンテナから見たGPS衛星が見晴らし角内にする手段から成る事を特徴とする。
(もっと読む)
目標運動解析方法及び目標運動解析装置
【課題】目標運動解析の解の収束を早め、解の精度を向上させること。
【解決手段】本発明の目標運動解析方法は、センサにて前記目標を探知する探知ステップと、前記センサにて探知された前記目標の探知方位及び探知周波数、該探知された探知時刻、及び、該探知時刻における前記センサの位置情報を含む目標探知情報を生成する生成ステップと、前記センサにて信号を受信可能な探知領域を計算する計算ステップと、前記センサの目標探知情報及び探知領域を使用し、前記センサの探知領域と前記目標の探知方位とが重なる領域を前記目標の存在圏と限定した上で、前記目標の位置を推定する第1の推定ステップと、を有する。
(もっと読む)
衛星測位システム受信機測位信頼度評価装置
【課題】衛星測位システムの受信機の測位の信頼度の評価の精度を向上させた衛星測位システム受信機測位信頼度評価装置の提供。
【解決手段】移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置であって、受信機の出力に基づいて受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出部と、衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出部と、少なくとも第1評価パラメータおよび第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出部と、マハラノビス距離に基づいて受信機の測位信頼度を評価する信頼度評価部と、を有する、測位信頼度評価装置。
(もっと読む)
移動体用測位装置
【課題】より正確に移動体の位置を算出すること。
【解決手段】衛星電波を用いて衛星と移動体との疑似距離を算出する疑似距離算出手段と、衛星電波から把握される衛星の位置と、位置演算手段又は他の手段により算出された移動体の位置と、を結ぶ視線ベクトルを算出する視線ベクトル算出手段と、道路が複数のリンクで表現された地図データを記憶した記憶手段と、地図データを用いたマップマッチングを行なって移動体の位置を算出するマップマッチング手段とを備え、視線ベクトル算出手段により算出された視線ベクトルとマップマッチング手段により移動体が存すると推定されたリンクとのなす角度に関する条件を含む所定条件を満たす場合にはマップマッチング手段により算出された移動体の位置に基づいて誤差情報を更新し、満たさない場合にはマップマッチング手段により算出された移動体の位置以外の情報を用いて誤差情報を更新する移動体用測位装置。
(もっと読む)
慣性測定ユニット(IMU)のための空間整合判断
本明細書で開示する主題は、慣性測定ユニット(IMU)の空間整合を判断するためのシステムおよび方法に関する。例として、第1のビークルベース方向を識別し、第1のビークルベース方向を地球ベース座標フレームに変換可能な第1の方向に関連付ける方法について説明する。第1の方向に少なくとも部分的に基づいてIMUの空間整合を判断する。 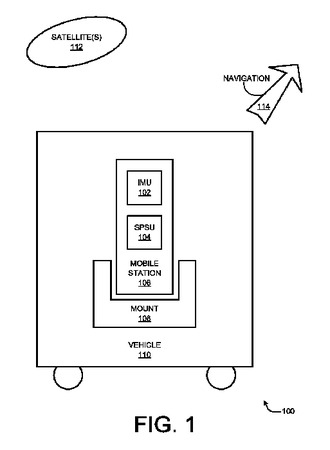 (もっと読む)
(もっと読む)
航空機または船舶のリコーダーからのデータ遠隔収集方法及び装置
本発明は、沈没するときに放出させることが可能であり、かつフライトあるいは航海に関する情報だけでなく、漂流中のブイの位置をも記憶するメモリを二重に備えたブイ(3)を用いる、航空機または船舶のリコーダーからのデータ遠隔収集方法及び装置に関する。送受信両用無線通信手段により、ブイにメモリの内容を偵察航空機等の遠隔収集手段へ転送させることが可能である。 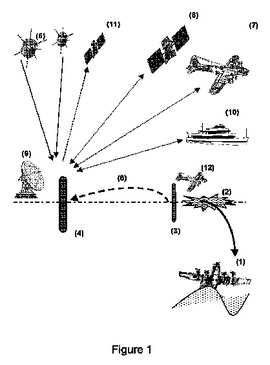 (もっと読む)
(もっと読む)
移動体表示装置
【課題】移動体の特定の挙動を検出することで、その挙動を示した位置を自動的に記憶することができる移動体表示装置を提供する。
【解決手段】移動体表示装置としてのプロッタ装置は、GPS受信機と、メモリと、CPUと、を備える。GPS受信機は、測位信号を取得して、当該自船の位置を算出する。また、GPS受信機は、測位信号に基づいて、自船の速度又は向きを算出する。メモリは、GPS受信機で算出した前記速度が所定時間内に所定の変化量以上変化したこと、又は、GPS受信機で算出した向きが所定時間内に所定角度以上変化したことを検出した場合に、前記変化が生じた位置を記憶する。CPUは、前記変化が生じた位置に対応するマークをディスプレイに表示するための処理を行う。
(もっと読む)
海難事故防止システム
【課題】GPS受信機、無線通信機を紛失した場合や、サーフボード及びカヤックから離れてしまった場合の緊急事態でも緊急信号の発信と遭難者の位置特定を可能とする。
【解決手段】海難事故防止システムは、地図情報表示処理部と、通信受信部と、位置情報解析処理部と、解析結果表示部とを備える監視装置と、海上に出る人が装着する位置情報通信装置1号機と、海上スポーツ用具に装着される位置情報通信装置2号機とからなる。これら二つの位置情報通信装置は、GPS受信機を双方とも備え、互いの装置が正常機能しているか、通信可能範囲にあるかの検知を可能として、他方の装置が通信可能範囲外にある場合、異常事態として通信手段部から監視装置側の通信受信部へ危険信号を発信する。
(もっと読む)
擬似乱数出力装置、送信装置及び探知機
【課題】他の装置との間で類似することが少ない擬似乱数列を出力し得る擬似乱数出力装置を提供する。
【解決手段】船舶に搭載される擬似乱数出力装置20は、GPS受信機21と、擬似乱数発生部22と、を備える。GPS受信機21は、GPS衛星から測位信号を受信し、自船の位置等のデータを取得する。擬似乱数発生部22は、GPS受信機21が出力する緯度及び経度の情報を加工したものをシードとして用いることにより、擬似乱数を発生させる。擬似乱数発生部22から得られた擬似乱数は、船舶に搭載されるレーダ装置1において、レーダアンテナ14からパルス信号を送信する時間間隔を決定するために用いられる。
(もっと読む)
電波発射源標定装置
【課題】電波発射源が静止していれば、電波発射源の位置を推定して表示し、電波発射源が移動していれば、電波発射源の移動経路を推定して表示することができるようにする。
【解決手段】静止/移動判定部3により電波発射源ESが静止していると判定された場合、静止位置推定部4がヒストグラムの中で最も密度の高い座標が示す位置が、電波発射源ESが静止している位置であると推定し、静止/移動判定部3により電波発射源ESが移動していると判定された場合、移動経路推定部5が方位測定部1から出力された複数の方位線の情報と予め設定された電波発射源ESの推定位置及び推定移動速度から、電波発射源ESの移動経路を推定する。
(もっと読む)
移動体用測位装置
【課題】連続性の低下による制御への影響を低減しつつ誤差を小さくするように、速度ベクトルを算出すること。
【解決手段】移動体に搭載される移動体用測位装置であって、複数の衛星から送信される電波を受信する受信手段と、前記受信手段により受信された電波を用いて移動体の速度ベクトルを算出する速度ベクトル算出手段と、前記移動体の停止状態を検出するための停止状態検出手段と、を備え、前記速度ベクトル算出手段は、前記停止状態検出手段により前記移動体の停止状態が検出された状態で、前記速度ベクトル算出手段が速度ベクトルの算出に用いている衛星が切り替わったときに、前記速度ベクトルの大きさを零にリセットする処理を行なうことを特徴とする、移動体用測位装置。
(もっと読む)
姿勢計測装置
【課題】アンテナ間の距離が短くなっても姿勢の測定精度を向上させることができるようにする。
【解決手段】データテーブル14には、予め求めておいた各アンテナについて各衛星からの信号の移動体座標系における到来方向ごとのカップリング誤差のデータが格納されている。誤差取得部15は、この到来方向に対応したカップリング誤差のデータをデータテーブル14から取得する。姿勢算出部17は、このカップリング誤差を除いた一重位相差又は二重位相差を用いて船舶の姿勢を算出する。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測定精度を向上させること。
【解決手段】GNSS衛星から送信される測位信号に基づいて測位演算を行うGNSS受信装置は、当該GNSS受信装置が同一のGNSS衛星からの測位信号を捕捉した状態において、直接波と反射波との間で位相差が生じるように配置される複数のアンテナと、同一のGNSS衛星からの測位信号に含まれるコードを用いて、該GNSS衛星と当該GNSS受信装置との間の擬似距離を求める擬似距離計算部と、各擬似距離の差分を求める擬似距離差分計算部と、該差分に基づいて、前記GNSS衛星からの測位信号がマルチパスの影響を受けていることを判定する判定部と、GNSS衛星からの測位信号以外の情報に基づいて、当該GNSS受信装置の位置を推定する位置推定部と、マルチパスの影響を受けていると判定された場合に、前記位置推定部により推定された位置情報を出力する位置情報出力部とを有する。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測位精度を向上させること。
【解決手段】GNSS受信装置は、測位信号に含まれるコードを用いて、該コードと該コードのレプリカ信号との相関をとり、相関値が最大とされる位相と、該位相に対して進んだ位相及び遅れた位相を求め、GNSS衛星と当該GNSS受信装置との間の擬似距離を求める擬似距離演算部と、複数の異なる時定数により、擬似距離を搬送波の位相変化量でフィルタリングするノイズ除去部と、進んだ位相及び遅れた位相に基づいて、所定の時間間隔における進んだ位相に対応する相関値と遅れた位相に対応する相関値との間の大小関係の評価値を求める評価値算出部と、評価値に基づいて、フィルタリングされた擬似距離のうちの一つを出力する選択部とを有する。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測位精度を向上させること。
【解決手段】GNSS衛星から送信される測位信号に基づいて測位演算を行うGNSS受信装置は、GNSS衛星からの測位信号に基づいて、測位演算を行う測位演算部と、GNSS衛星からの測位信号以外の情報に基づいて、当該GNSS受信装置の位置を推定する位置推定部と、直接波と反射波との間の経路差の変化率を推定する経路差変化率推定部と、経路差の変化率に基づいて、測位演算結果と位置推定結果との間の重み付けを設定する重み付け設定部と、設定された重み付けに従って、当該GNSS受信装置の位置を求める位置演算部とを有する。
(もっと読む)
21 - 40 / 131
[ Back to top ]