
Fターム[5J062HH04]の内容
Fターム[5J062HH04]に分類される特許
61 - 80 / 122
受信機の位置決定
開示される方法及びシステムを使用してユーザ装置の位置を決定する。ユーザ装置は、データ信号及び/又は搬送波信号を、周回している宇宙船から受信することができる。これらのデータ信号は、ユーザ装置の測位計算及び/又は追尾維持に使用することができる。開示される方法及びシステムは、ユーザ装置の時間バイアス及び周波数バイアスの問題を解決することができる。追尾維持を行なう場合、カルマンフィルタ状態推定器を拡張してユーザ装置の速度を推定することができる。 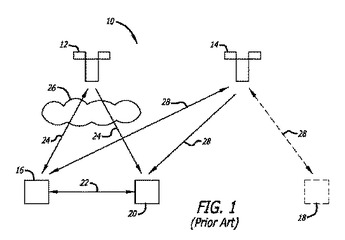 (もっと読む)
(もっと読む)
画像処理装置及び無線通信装置及び画像処理方法及び画像処理プログラム
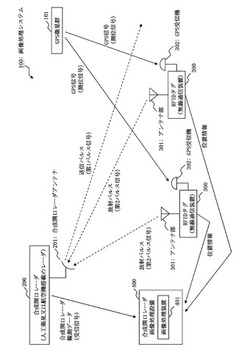
【課題】能動的に電波を放射する無線通信装置を利用しつつ、無線通信装置を利用しない場合と同様の地上のレーダ画像を得て、無線通信装置の位置に基づき、レーダ画像を高精度で補正する。
【解決手段】合成開口レーダ200はチャープ変調した送信パルスをパルス繰り返し間隔PRIごとに送信し、地上で反射した信号を受信信号として受信する。RFIDタグ300はチャープ変調した放射パルスを別のパルス繰り返し間隔PRI’ごとに送信し、受信信号の一部として合成開口レーダ200に受信させる。画像処理装置401は、受信信号をパルス繰り返し間隔PRIごとにレンジ圧縮する等により通常の地上のレーダ画像を再生する。また、受信信号をパルス繰り返し間隔PRI’ごとにレンジ圧縮する等によりRFIDタグ300が映った画像を再生し、この画像とRFIDタグ300の位置情報とに基づいて地上のレーダ画像を補正する。
(もっと読む)
移動位置検出装置

【課題】ジャイロセンサや加速度センサを用いることなく、安価且つ小型な装置で実際の方位に近い補間位置を特定することができる移動位置検出装置を提供する。
【解決手段】GPS測位位置を一定周期(T)毎に特定するGPS装置11と、車速パルス発生装置12と、前回のGPS測位位置を特定してから新たなGPS測位位置を特定するまでの一定周期(T)中における単位時間(Δt)毎の移動距離を求めて補間位置を特定する計算装置13と、を備え、計算装置13は、単位時間(Δt)毎に特定した補間位置のうち一定周期(T)よりも短い直近の過去一定時間(ΔT)でのGPS測位位置を含む複数の補間位置から平均補間位置を特定し、前回の平均補間位置から最新の平均補間位置への方位を前回の補間位置から最新の補間位置への推定方位とすると共に、その推定方位と前回の単位時間(Δt)での移動距離とを用いて最新の補間位置を特定する。
(もっと読む)
ナビゲーション装置、位置決定システム及び方法
ナビゲーション装置(200)は、識別できる基地局(282,286,290)によってサポートされた無線通信ネットワーク(280)を介してデータを通信する無線通信ユニット(228)を備える。装置(200)は、使用中に、作動環境(262)をサポートするように構成された処理リソース(202)をさらに備え、作動環境(262)は、無線通信ユニット(228)によって受信できる、識別できる基地局(282,286,290)のアイデンティティの少なくともいくつかを、現在位置において無線通信ユニット(228)から受信するように構成された位置決定モジュール(268)をサポートする。位置決定モジュール(268)は複数のデータ関連付けエントリを含むデータ記憶部(214,160)にアクセスすることがでる。データ関連付けエントリの各々は、識別できる基地局のいくつかの記憶されたアイデンティティと、いくつかの記憶されたアイデンティティが受信できる位置に関連付けられた位置識別子とを含む。位置決定モジュール(268)はさらに、複数のデータ関連付けエントリからいくつかの記憶されたアイデンティティに関連する現在位置を決定するように構成されている。 (もっと読む)
無人ボート自動観測システムおよび無人ボート自動観測方法
【課題】観測航路を自動的に生成しその観測航路下の水中または水底の様子を自動的に観測できるようにする。
【解決手段】観測航路を生成するために基準観測線を入力し(S1)、前記基準観測線を一定の距離平行移動させることによって複数の観測航路を生成し(S2)、生成された複数の観測航路の距離を確定させると同時に確定させた観測航路の航行順序を指示し(S3)、指示された航行順序にしたがって無人ボートを航行させ(S4)、航行中に少なくとも水中または水底の様子のいずれかを観測し(S5)、観測されている少なくとも水中または水底の様子を表示するとともに記憶させる(S6)。
(もっと読む)
追跡システム
アセットの規定された地理的境界への進入および/またはそこからの退出を地理的に追跡し、それらを報告するための装置、方法およびシステム。進入および退出テストは、アセットが地理的境界に進入したかまたは退出したかを判断するために、位置フィックスを様々なしきい値およびパラメータと比較する。テストは、より低い複雑さレベル(より低い次数)を有するテストが、より高い複雑さレベル(より高い次数)を有するテストの前に実行されるように、順序付けられる。このようにして、たいていの位置フィックスは、従来どおり実装されるよりも低い次数の数学的複雑さを有する計算を使用して処理される。 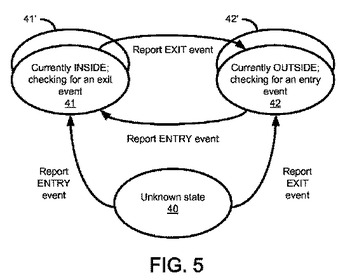 (もっと読む)
(もっと読む)
GPSによる位置計測装置および位置計測方法
【課題】RTK法によるフィックス解が異常値になっている場合には、その異常値を除去し得るGPSによる位置計測方法を提供する。
【解決手段】基準局1及び観測局2で得られた測距データをそれぞれ4個の解演算部12に入力するとともに、これら各解演算部12にて、RTK法を用いて、観測局におけるフィックス解などのRTK解を演算し、これらのRTK解を解取得部13に入力し、ここでフィックス解の個数が複数であるか否かを判断するとともに、フィックス解が複数であると判断された場合にこれら各フィックス解同士の偏差を求め、そして全ての偏差が許容値以下であるか否かを判断するとともに、許容値以下であると判断された場合にこれらのフィックス解に所定の演算処理を施して正常なフィックス解を取得し、且つ上記各解演算部を所定時間おきにずらせて順次再起動させる方法である。
(もっと読む)
広域測位システム
受信機の位置を決定するためのシステム及び方法が記載される。測位システムは、測位信号をブロードキャストする送信機を含む送信機ネットワークを含む。測位システムは、測位信号及び/又は衛星信号を取得して追跡するリモート受信機を含む。衛星信号は衛星ベースの測位システムの信号である。リモート受信機の第1のモードは、リモート受信機が測位信号及び/又は衛星信号を使用して位置を計算する、端末ベースの測位を使用する。測位システムはリモート受信機に結合されたサーバーを含む。リモート受信機の第2の動作モードは、サーバーが測位信号及び/又は衛星信号からリモート受信機の位置を計算する、ネットワークベースの測位を含み、リモート受信機は測位信号及び/又は衛星信号を受信してサーバーに転送する。  (もっと読む)
(もっと読む)
移動体監視装置、移動体監視方法、移動体監視システムおよびコンピュータプログラム
【課題】複数の移動通信端末が同一の局所領域に位置しているときは通報を回避する移動体監視装置を提供する。
【解決手段】移動体監視装置30は、第1移動通信端末の位置情報(第1位置情報)が予め登録した監視エリア情報に含まれるか否か判定する現在位置判定部33と、第1位置情報と第2移動通信端末の位置情報(第2位置情報)とを照合することにより第1移動通信端末および第2移動通信端末が同一の局所領域に位置しているか否か判定する同位置判定部34と、第1位置情報が監視エリア情報に含まれないとき、かつ第1移動通信端末および第2移動通信端末が同一の局所領域に位置していないとき、第2移動通信端末および予め設定された他の端末のうち少なくとも一つにアラームを送出する通報部35と、を備えている。
(もっと読む)
宇宙船の位置を推定するシステムおよび方法
宇宙船(6)の位置を推定するためのシステムが開示される。このシステムは、宇宙船(6)から送信された信号を受信するための受信局(4)および受信局(4)からのデータを受信するための処理局(2)を含む。各受信局(4)は、宇宙船(6)から送信される信号を記録ウィンドウ(8)の期間中に記録して、記録ウィンドウ(8)の期間中に記録された信号を表すデータを処理局(2)へ送信する。受信局(4)のそれぞれに関連した記録ウィンドウ(8)は、互いにオフセットされ、かつ/または別々のサイズである。処理局(2)は、宇宙船(6)と複数の受信局のそれぞれとの距離間の差を推定して宇宙船(6)の位置を推定するために、記録された信号の相関をとる。方法、受信局(4)、処理局(2)およびコンピュータプログラムも開示される。 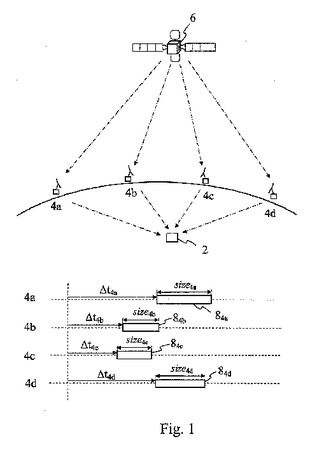 (もっと読む)
(もっと読む)
GPS受信機とGPS信号を処理する方法
【課題】 GPS受信機中の局部発振器を較正すること。
【解決手段】受信機は高精度搬送波周波数信号に自動的にロックし、基準信号を発生し、この基準信号で局部発振器を較正する。
(もっと読む)
ワイヤレス・デバイス上で発生したイベントにサービス品質を有するロケーション・フィックスを関連付けるための装置および方法
ワイヤレス通信ネットワーク中で通信しているワイヤレス・デバイスの動作に関連するイベントに対応する地理的位置を推定するための装置および方法。イベントの発生と、それぞれイベントの前および後に測定される第1のロケーション・フィックスおよび第2のロケーション・フィックスのうちの少なくとも1つのワイヤレス・デバイスの関連する時間および速度との間の時間および距離を分析する。得られるフィックスが地上ワイヤレス通信測定に少なくとも部分的に基づくように調整されたサービス品質(QoS)を有する第1および第2のロケーション・フィックス。これらの分析は、地理的位置を検証し、いくつかの例では、イベントに関連付けるべき好適な地理的位置を判断するために、それらのメトリクスを所定の時間しきい値と比較することを含む。 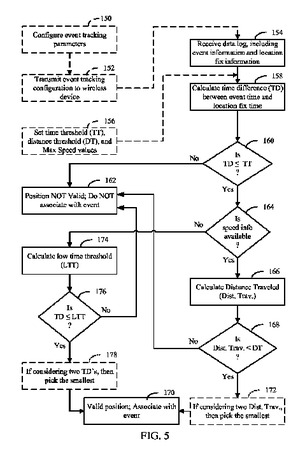 (もっと読む)
(もっと読む)
移動体位置推定方法及び移動体位置推定システム
【課題】設置センサ、移動体の位置情報を自動でキャリブレーションするだけでなく移動体のトラッキングも同時に行う。
【解決手段】測定領域内を移動する移動体Mの位置を推定する場合に、測定領域内のn箇所以上の地点の送信機T1〜Tnから移動体M(受信機R)までの距離を互いに時刻同期した状態で測定し、各測定地点から移動体Mまでの任意の測定時刻の距離データを受信機Rで取得し、位置推定装置Pにおいて、取得された任意の測定時刻の距離データから個々の測定地点及び移動体それぞれの位置を推定する。その際、移動体Mの移動前後の位置それぞれの3箇所以上の測定地点から得られる距離データを用いて、各測定地点の位置のキャリブレーション及び移動体Mの移動位置の推定を同時に行う。
(もっと読む)
低周波電磁信号に応答した衛星ナビゲーション受信機制御
いくつかの実施形態に従った、可搬型電子デバイスの中の衛星ナビゲーションシステム(SNS)受信機を動作させる方法は、電線路に関連する低周波信号が存在しているか存在していないかを判定するステップと、電線路に関連する低周波信号の検出に応答してSNS受信機をディスエーブルするステップとを含む。本方法は、衛星ナビゲーション信号の低下を検出するステップをさらに含むことができ、電線路に関連する低周波信号が存在しているか存在していないかの判定は、検出した衛星ナビゲーション信号の低下に応答して実行してもよい。関係したデバイスもまた開示される。 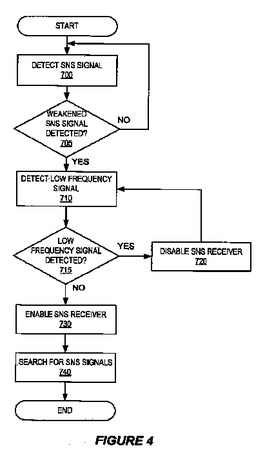 (もっと読む)
(もっと読む)
位置通知システム
【課題】GPSを用いた技術では正確な測位ができないような場所にいる場合であっても、その位置を特定する。
【解決手段】携帯電話機10−2は、位置通知のリクエスト信号を受信すると、収音を行なって(S6)、収音した音を表す音信号に重畳された領域IDを抽出する(S7)。そして、携帯電話機10−2は、GPS信号に基づいて所在地を測位して(S8)、これらを測位装置20に送信する(S9)。測位装置20は、受信した領域IDに対応付けて領域特定テーブルに記憶されている領域名称を特定し(S10)、所在地と領域名称とを地図上に示して表示出力させる(S11〜S13)。これにより、地図上にその所在地に対応するマーキングと共に、領域名称「○○デパート2階」のように、その所在地におけるさらに詳細な位置も表示される。
(もっと読む)
ロケーションネットワークを時系列的に同期化するための方法及び装置
【課題】既知の場所で位置判定ユニット装置によって生成される固有の位置判定信号を、別の既知の場所で基準位置判定信号を生成している基準送信器に時系列的に同期化させる。
【解決手段】a)基準位置判定信号を受信し解釈して、基準送信器と位置判定ユニット装置の間の基準位置判定信号の伝播遅延を求め、b)固有の位置判定信号を生成、送信、受信し、c)受信した基準位置判定信号を解釈して、i)基準位置判定信号の送信マイナス受信時間と、ii)固有の位置判定信号の送信マイナス受信時と、を推論し、d)段階ci)とcii)を比較して、時系列的な送信差を推論し、e)基準信号伝播遅延によってオフセットされた、推論された時系列的な送信差によって固有の位置判定信号を時系列的に調整し、f)固有の位置判定を送信し、固有の位置判定信号は基準送信器に時系列的に同期化される。
(もっと読む)
位置決定データを処理する方法
マップに含まれる領域内のナビゲーションできる経路の区域を表すナビゲーションできる、夫々関連付けられた速度データを持つ、複数の区域を含むマップデータを位置決定データから生成する方法であり、(i)1つ以上のナビゲーション装置を用いて位置決定データを生成する工程と、(ii)位置決定データを処理して、位置決定データから速度データを生成する工程と、(iii)ナビゲーション装置による使用に適切なマップデータの生成が起こった、ナビゲーションできる区域に速度データを関連付けるために、マップデータを速度データでアップデートする工程と、を含み、生成された速度データは、速度データを生成する位置決定データが発生したナビゲーションできる区域と関連付けられている、ことを特徴とする方法。 (もっと読む)
ロケーションデバイス
ロケーションデバイス(10)は、好ましくは、衛星信号を受信するグローバルポジショニングデバイスである、ロケーション検出および処理モジュール(12)を具備する。モジュールは、デジタルでエンコードされた信号の形態で、ポジションデータを、起動デバイス(16)に結合されている制御プロセッサ(14)に出力する。プロセッサ(14)は、プロセッサ(12)から受け取った信号をさらに処理して、シンセサイザーが認識して、緯度および経度に関してデバイス(10)のポジションを表す音声データ信号に変換できる形態で、信号を音声シンセサイザー(20)に提供する。シンセサイザーはその信号を送信機(22)に送り、送信機は無線音声信号としてその信号を送信する。制御プロセッサは、中央機関への直接送信のために、デジタルでエンコードされた音声データを送信機(22)または送信機(23)に送ってもよい。 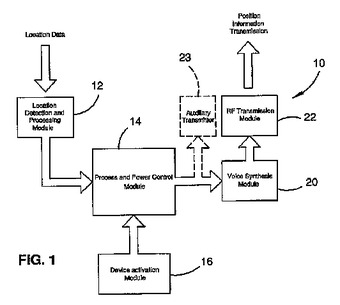 (もっと読む)
(もっと読む)
位置決定データを処理する方法
マップに含まれる領域内のナビゲーションできる経路の区域を表すナビゲーションできる、夫々関連付けられた速度データを持つ、複数の区域を含むマップデータを生成するために位置決定データを処理する方法であり、少なくとも1つのナビゲーションできる区域に、一般的には各ナビゲーションできる区域に、関連付けられた速度データを、該速度データが該速度データと関連付けられたナビゲーションできる区域のパラメータに従って分類され得る複数の分類を持つクラシフィケーションの1つの分類に分類する工程と、クラシフィケーションの各分類ごとの分類平均を生成する工程と、関連付けられた速度データが存在するかを確認するために、少なくともいくつかのナビゲーションできる区域を、一般的には各ナビゲーションできる区域を、評価する工程と、あるナビゲーションできる区域に関連付けられた速度データが存在しない場合、処理中のナビゲーションできる区域のパラメータに従って、前記分類平均を該処理中のナビゲーションできる区域の速度データとして用いる工程と、を含むことを特徴とする方法。 (もっと読む)
無線周波追跡・通信装置、およびその動作方法
【解決手段】集積回路チップ上に、無線機がプロセッサと電気的に通信するよう規定される。無線機は、国際周波数で動作するよう規定されており、プロセッサによって送信される制御信号に従って電源オン/オフされるよう規定される。位置決定部が、プロセッサと電気的に通信するよう規定される。位置決定部は、さらに、プロセッサによって送信される制御信号に従って、電源をオン/オフされるよう規定される。電源が、プロセッサ、無線機、および、位置決定部に電力を供給するよう規定される。プロセッサ、無線機、位置決定部、および、電源は、移動可能な資産に取り付け可能なポータブルデバイスに組み込まれる。電源を交換することなしに、ポータブルデバイスの長期の配備を可能にするために、電源管理プログラムが実装される。 (もっと読む)
61 - 80 / 122
[ Back to top ]