
Fターム[5J070AA04]の内容
レーダ方式及びその細部 (42,132) | 一般 (555) | データ伝送(レーダリレー) (180)
Fターム[5J070AA04]の下位に属するFターム
Fターム[5J070AA04]に分類される特許
61 - 80 / 147
無線タグ通信装置
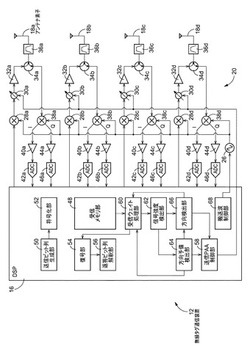
【課題】マルチパスの発生し得る環境において好適に無線タグの方向を検出する無線タグ通信装置を提供する。
【解決手段】送信アレイアンテナの指向性を制御する送信PAA制御部58と、受信アレイアンテナの指向性を制御する受信ウェイト処理部60と、送信アレイアンテナの指向性及び/又は受信アレイアンテナの指向性を変化させて無線タグとの通信感度が極大となる方向に基づいて無線タグの方向を予備検出する方向予備検出部64と、送信アレイアンテナの指向性の中心方向が方向予備検出部64により予備検出された方向となるように制御すると共に、受信アレイアンテナの指向性を変化させて無線タグとの通信感度が極小となる方向に基づいて無線タグの方向を本検出する方向検出部66とを、備えたものであることから、対象となる無線タグとの間で確実な通信を実現しつつその方向を好適に検出することができる。
(もっと読む)
レーダシステム及びそれに用いる送信機並びに受信機

【課題】 相対速度及び相対距離を計測するレーダシステムにおいて、通信品質の劣化を抑えかつ小型化する。
【解決手段】 制御部7からの制御信号に従い、周波数変調パルス信号発生器9は相対距離及び相対速度計測用信号(以下、測距用信号)を生成するための周期的なパルス信号を生成し電圧制御発振器10へ出力する。電圧制御発振器10はパルス信号により周期的に変化する測距用信号をミキサ11へ出力する。ミキサ11は送信信号生成部8によって生成された送信信号を測距用信号で無線周波数帯へアップコンバートし無線通信用信号を生成する。ミキサ11は無線通信用信号と測距用信号とを同時に送信増幅器12へ出力する。測距用信号と無線通信用信号は送信増幅器12で送信電力まで増幅され送信アンテナ13から同時に放射される。受信機は受信した測距用信号と無線通信用信号から自乗検波によって送信信号を検出する。
(もっと読む)
RFIDタグ検出装置、RFIDタグ検出システムおよびRFIDタグ検出方法
【課題】検出対象領域に所在し識別対象物に付した複数のRFIDタグからの無線信号を受けるアンテナを適切に設置することを可能にするRFIDタグ検出装置、RFIDタグ検出システムおよびRFIDタグ検出方法を提供する。
【解決手段】RFIDタグ検出装置では、アンテナ10は、RFIDタグからの識別信号を受け、タグリーダ32は、アンテナ10で受けた識別信号を基に識別子を識別する。表示処理装置33は、複数のRFIDタグ2の識別子とこれら複数のRFIDタグ2の所在を示す位置情報と関連づけたRFIDタグデータベース記憶部33cにアクセスし、タグリーダ32で識別された識別子に対応する位置情報を検索しRFIDタグ2の検出対象領域での検出状態を示す3次元グラフを表示する。
(もっと読む)
位置検出システム。
【課題】 対象物と受信器の間又はあらかじめ位置確認がなされた複数の位置と受信器の間に同一の障害物が介在する場合でも、精度良く対象物の位置検出が可能な位置検出システムを提供すること。
【解決手段】 位置検出すべき対象物2が付帯するタグRFtからの第1の信号と、あらかじめ位置確認がなされた複数の位置のリファレンスタグRFa〜RFeからの第2の信号と、第1の信号と第2の信号を受信する3台の受信器RSa〜RSc(タグリーダー)と、受信器RSa〜RScが受信した第1の信号と第2の信号を用いて対象物2の位置を検出する位置検出システムで、第1の信号と第2の信号の夫々の電界強度の状態と、電界強度の状態の変化の時期と、から対象物2の位置を検出する。
(もっと読む)
ICタグリーダーとGPSを併用したICタグ位置情報取得システム
【課題】 野外の広範囲に及ぶエリア内にあって、検索対象者の動向を把握する事が出来る安価な位置情報検索システムを得る。
【解決手段】 検索対象者20が携帯する非接触アクティブ型ICタグ21と、この非接触アクティブ型ICタグ21の情報を読み取る固定式ICタグリーダー1と、この固定式ICタグリーダー1が読みとる事が困難なエリアをカバーするためのICタグリーダー12と位置情報を測位するGPS受信機11を備えた位置情報取得装置10を有する移動体と、固定式ICタグリーダー1と位置情報取得装置10のデータを、蓄積するシステムサーバー30を備えたことを特徴とするICタグリーダーとGPSを併用したICタグ位置情報取得システムを備える。
(もっと読む)
遅延時間検出装置、遅延時間検出方法、遅延時間検出機および遅延時間検出プログラム
【課題】送信機100と受信機200の同期が不要で、かつ、直接波と反射波の到来方位を推定する必要がなく、直接波と反射波が混成した受信信号から直接波と反射波を識別でき、かつ、直接波と反射波との遅延時間差を検出できるようにすることを目的とする。
【解決手段】送信機100において変調器130が振幅変調と周波数変調と位相変調とのいずれかの変調を行い、送信器120が振幅と周波数と位相とのいずれかに特定の変化を有する送信波を送信アンテナ110を介して送信する。受信機200において受信器220が受信アンテナ210を介して送信機100からの直接波と目標物300で反射した反射波とそれ他の不要波とを混成波として受信し、復調器230が混成波を復調し、遅延時間検出器240が特定の変化を有する直接波と反射波とを混成波から識別し、直接波の受信時刻から反射波の受信時刻までの時間を送信波と反射波との遅延時間差として算出する。
(もっと読む)
物体の表面の動きを検出する方法および装置
本発明は、物体の表面の動きを検出装置によって検出する方法に関し、該物体は、検出プロセス中に静止状態にあり、かつ検出装置に対して壁の反対側の空間内に位置し、かつ1.1よりも大きい比誘電率εrを有する。前記方法は、レーダ信号を送信する段階および物体によって反射されたレーダ信号を受信する段階、ならびに、動きが検出されたならば、加えて、その動きを三次元組み合わせレーダモデルおよびデータモデルにおいて視覚化する段階を含む。本発明はまた、前記方法を実施するための検出装置に関する。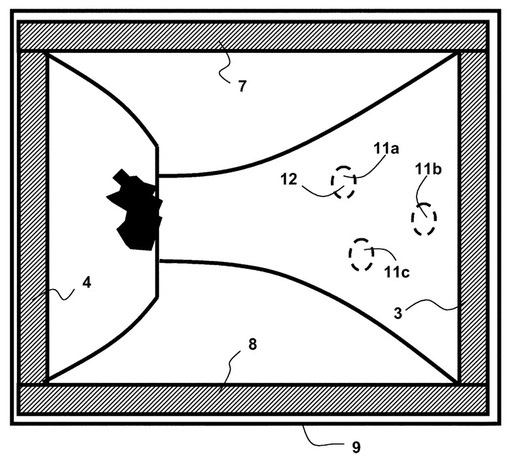
 (もっと読む)
(もっと読む)
ネットワークレーダシステム、レーダおよび中央制御装置
【課題】或るレーダが受け持った追尾目標を他のレーダが探知するのを防ぎ、システム全体としての探知性能の劣化を抑える。
【解決手段】確立除外情報抽出部24により、各レーダの探知覆域を既追尾目標が通過するかどうかを判定して、探知覆域を通過する場合に限り確立除外情報を作成してその探知覆域を形成するレーダに対して通知するようにし、このことによって、対応するレーダの追尾処理部14の追尾航跡の確立処理において、通知された確立除外情報と相関のとれる航跡に対しては確立させないようにしている。
(もっと読む)
通信統合レーダ装置、通信統合レーダシステム
【課題】装置規模を増大させることなく、精度の良いチャネル行列をリアルタイムで生成可能な通信統合レーダ装置、及びこれを用いた通信統合レーダシステムを提供する。
【解決手段】アクティブターゲット装置からの折返波に基づくIF帯のビート信号の距離周波数スペクトルに基づき、周知のFMCWレーダの手法を用いて、各折返波に基づく信号成分(即ち、アクティブターゲット装置からの信号)を分離し(S210〜S240)、その分離した信号成分に基づいて、各受信アンテナで受信される受信信号から各アクティブターゲット装置毎の信号を分離抽出する際に用いるウェイト行列の生成に用いるチャネル行列を生成する(S250〜S260)。
(もっと読む)
航空管制用レーダシステム
【課題】離陸直後に出発機が急旋回する等の航路を取った場合にも機影を見失うことなく確認することができ、また滑走路周辺の離発着機情報を捉えることができる航空管制用レーダシステムを提供する。
【解決手段】航空管制用レーダシステムは、空港監視レーダ(ASR)と、二次監視レーダ(SSR)と、精測進入レーダ(PAR)と、所定の出発機についてSSRおよびASRによってそれぞれ得られる出発機情報とこの出発機についてPARによって得られる出発機情報とに基づいて出発機の追尾を行う。また、ASRで得ることができない滑走路周辺の離発着機情報をPARで補間し追尾を行う構成とすることができる。
(もっと読む)
移動体の方向推定システム、及び該方向推定システムを備える移動体ナビゲーションシステム。
【課題】本発明は、移動軌跡や地磁気を用いることなく移動体の方向情報を直接的に取得するためのシステムを提供することを目的とする。
【解決手段】本発明は、移動体が移動する平面に無線ICタグを埋設する。該無線ICタグに記憶された座標情報を、移動体が備える2つのアンテナによって同時に2箇所から取得しこれを演算することによって移動体の進行方向を推定する。また、正三角形の各頂点に配置された3つの無線ICタグの信号が発信する無線信号の受信状態を、移動体が備える回転するアンテナによって追跡することによって、該移動体の進行方向を基準とした3つの無線ICタグのそれぞれの方位角情報を演算することによって移動体の進行方向を推定する。
(もっと読む)
精測進入レーダ装置
【課題】管制対象とする航空機を自動追尾できるようにし、これにより管制官の負担を軽減可能な精測進入レーダ装置を提供すること。
【解決手段】飛行場監視レーダおよびレーダ情報処理システムから飛行場周辺の航空機の便名や位置情報などを取り込み、表示装置16にA/N表示する。表示された航空機のうち管制対象機をマウス19により選択指定すると、信号処理部15により生成される空中線制御信号をサーボ制御部18に与え、方位空中線13および高低空中線14のビーム指向方向が管制対象機を追尾するように自動制御するようにしている。このようにしたので、管制官はジョイスティック17等による空中線のビーム制御を行うことなく、管制対象となる航空機を簡単な操作により一度選択するだけでこれを自動追尾できる。従って管制官の負担を軽減でき、管制官は本来の管制業務に専念できるようになる。
(もっと読む)
監視装置
【課題】橋脚、トンネル、橋桁等の構造物の異常の有無を無人で常時検査して監視可能な監視装置を提供する。
【解決手段】検査対象の構造物に電磁波を送出する送信アレイアンテナ24と、構造物内部からの反射波を受信する受信アレイアンテナ31と、送信アレイアンテナ24の電磁波送出方向を可変するデジタルビームフォーミング部10と、受信アレイアンテナ31の受信信号から反射波到来角を推定する到来角推定部40と、電磁波の送出から受信までの時間を演算する送受信時間演算部50と、反射波の推定到来角データと送受信時間データに基づいて構造物の異常の有無を判定する判定部60と、判定結果を外部に送信する無線通信部70と備えた監視センサ2を、構造物に取付けて常時監視する。
(もっと読む)
乗物または設備のための操舵および安全システム
乗物または設備のユーザが、乗物または設備の周囲状況および乗物または設備自体に関する高度でかつ最新の情報を取得することを可能にするための、乗物用システムが提供される。このシステムは、海洋船の上に位置してもよく、また、船上と船外の両方に位置する多数の異なる情報源からの情報を統合する。それらの情報は、船舶上の高度なレーダーおよびソナーサブシステムからの情報、従来の機器およびセンサからの情報、ならびに陸上のコントロールセンターからアクセスされる陸上および海上設備およびEO衛星からの情報を含む。このシステムは、利用可能である場合、通信衛星および/または無線インターネットによってコントロールセンターと通信してもよい。データを処理し、提示するためのデータ処理装置もまた提供される。データは、空間内において3次元で受信され、処理され、提示され、時間がデータに対して4つめの次元を提供するように、リアルタイムまたはほぼリアルタイムに更新される。データを提示するためのグラフィカルユーザインターフェースも提供される。このグラフィカルユーザインターフェースは、エンドユーザ自身の観測結果が提示されたデータに一致しない場合、システムにおいてエラーを報告するための機能を提供する。さらに、2つ以上の船舶を含むデータを収集するシステム、コントロールセンター、ならびに、船舶およびコントロールセンターが通信する手段が提供される。このシステムは、収集されたデータを記憶するカタログおよび記憶ネットワークを備える。すべてのデータは、データの関連する品質尺度と共に記憶される。  (もっと読む)
(もっと読む)
無線ICタグID読取りシステム
【課題】 従来、複数の無線ICタグリーダ装置で無線ICタグの位置を計測すると、装置が複雑化してコスト面で課題があった。本発明は、1台の無線ICタグリーダ装置と画像取得装置により、複数の無線ICタグのIDと位置とを結び付け、無線ICタグの位置を特定する無線ICタグID読取りシステムを提供する。
【解決手段】 対象物の物理的情報を取得する対象物情報取得手段と、対象物の物理的情報に基づいて対象物に保持された無線ICタグまでの距離をタグ距離として推定するタグ距離推定手段と、タグIDを送信したときの無線ICタグの物理的情報を出力する無線ICタグリーダ手段と、タグIDと無線ICタグの物理的情報とに基づいて、無線ICタグの位置を識別するためのタグID属性情報を生成するタグID属性情報取得手段と、タグID属性情報とタグ距離とに基づいて、タグIDと位置との対応関係を識別する無線ICタグ識別手段とを備える。
(もっと読む)
レーダ表示補助定規
【課題】レーダー表示装置に接続されたキーボードやマウスなどによる煩雑な操作を必要とせずに、物標間の距離測定を実現する。
【解決手段】レーダ表示システムにおいて、レーダー表示端末と電子定規と、レーダー装置内の無線送信部と、電子定規内の無線受信部と、電子定規内の傾き検出部と、電子定規内の目盛り設定部を備えることを特徴とする、レーダー表示装置の画面モードや電子定規の置き方により適応的に目盛り表示が変化するレーダー表示システム。
(もっと読む)
モジュラー式ジオステアリング用ツールアセンブリ
地上層を通って操縦するための回収可能ツールは、第一のツールアセンブリ及びそれに取付けられた傾斜の付いたアンテナを有する。ツールはさらに、第一のツールアセンブリに取付けられた第二のツールアセンブリ及び第二のツールアセンブリに取付けられた傾斜の付いたアンテナを有する。第一のツールアセンブリは、アンテナが所定の方向に傾くように第二のツールアセンブリに取付けられる。傾斜の付いたアンテナは、トランスミッタアンテナ或いはレシーバアンテナである。各々のツールアセンブリは、管状のシリンダであり、長手方向の軸はシリンダの長さ方向を走る。管状のシリンダは二つの端を有しており、各々の端は回転取付け機構を有する。ツールアセンブリは、それらの回転取付け機構を介して、互いに取付けられる。回転取付け機構は、ネジ式機構、圧入式機構、或いは溶接機構である。 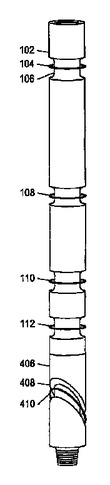 (もっと読む)
(もっと読む)
送受信システムおよび送受信方法
【課題】無線型伝送装置の存在位置を検知する。
【解決手段】外部発信受信装置10と無線型伝送装置20との間において、負荷変調方式に従って周波数13.56MHzの搬送波がやりとりされる。外部発信受信装置10は、送信信号(変調搬送波)を送信する。無線型伝送装置20は、外部発信受信装置10からの送信信号に応答して、振幅レベルが互いに異なる複数の返信信号(変調副搬送波成分)を順次出力する。複数の返信信号の各々は、ID情報とその返信信号の振幅レベルを示すレベル情報とを含む。また、外部発信受信装置10は、無線型伝送装置20からの返信信号を受信すると、その受信した返信信号の信号状態が所定条件を満たしており且つその返信信号の中からID情報およびレベル情報を検出できたならば、その検出したレベル情報に基づいて外部発信受信装置10と無線型伝送装置20との間の通信距離を求める。
(もっと読む)
無線タグ検出システム
【課題】無線タグ検出システムにおいて、新たな周波数帯域を使用することなく、読取装置が無線タグから情報を読み取る際の電波と、読取装置が受信機に対して情報を送信する際の電波とが互いに干渉しないようにする。
【解決手段】以上のように詳述した無線タグ検出システム1において、読取器101は、無線タグ102,103から送り返されたタグ応答に対応したタグデータを含む読取コマンドを生成し、この読取コマンドを送信する。読取器101から送信された読取コマンドは、無線タグ102,103によりタグ応答を出力する際に用いられるだけでなく、コマンド受信機104がタグデータを取得するためにも用いられる。よって、新たな周波数帯域を使用することなく、読取器101が無線タグ102,103から情報を読み取る際の電波と、読取器101が受信機に対して情報を送信する際の電波とが互いに干渉しないようにすることができる。
(もっと読む)
目標追跡に関する改善策
目標を追跡する方法が、目標の観察を行うように動作可能な複数の検知ノードを備える非集中型ネットワークに適用される。該方法は、各ノードが複数のモデル追跡アルゴリズムを実行し、それによって各ノードに記憶されている追跡情報を更新するステップと、各ノードが更新された追跡情報をネットワーク内の選択された他のノードに通信するステップと、各ノードが別のノードから追跡情報を受け取ることに応えて、該受け取る追跡情報を局所追跡情報と保守的に融合するステップとを備える。一実施形態では、複数のモデル追跡アルゴリズムは、相互作用複数モデル追跡アルゴリズムである。  (もっと読む)
(もっと読む)
61 - 80 / 147
[ Back to top ]