
Fターム[5J070AA04]の内容
レーダ方式及びその細部 (42,132) | 一般 (555) | データ伝送(レーダリレー) (180)
Fターム[5J070AA04]の下位に属するFターム
Fターム[5J070AA04]に分類される特許
121 - 140 / 147
測位システムおよび測位方法
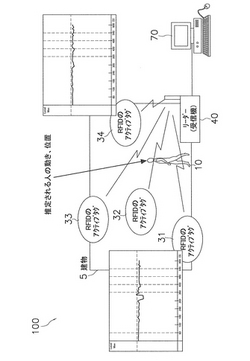
【課題】 読み取り装置の数を増加させることなく移動体の測位精度を上げる。
【解決手段】 測位システム100は、複数の固定アクティブタグ30と、タグリーダー40と、データ処理機70とを備えている。複数の固定アクティブタグ30は、それぞれ電磁波を発信する。タグリーダー40は、複数の固定アクティブタグ30が発信する電磁波をそれぞれ受信する。データ処理機70は、固定アクティブタグ30毎の変動データD1と固定アクティブタグ30毎の基準位置データD2とを固定アクティブタグ30毎に対応させて処理を行うことで、複数の固定アクティブタグ30それぞれとタグリーダー40との間の各領域を対象とした位置の測定(測位)を行う。
(もっと読む)
レーダ画像送信装置およびレーダ画像受信装置

【課題】 トレイル処理の影響を受けることなく、山側と里側との間での伝送するデータ量を低減するレーダ画像送信装置を得る。
【解決手段】 1画面分の走査が行われる間にレーダアンテナからのビーム送信により更新された座標のレーダ画像のみ出力するスキャンコンバータ1と、スキャンコンバータ1から出力されたレーダ画像を伝送する送信回路9とを備えたので、前走査フレームメモリを用いることなく、ビーム送信により更新された座標のレーダ画像を伝送することができる。これにより、山側と里側との間での伝送するデータ量を低減することができる。また、トレイル処理の前段で伝送を行っているため、伝送量はトレイル処理の影響を受けることもない。このように、トレイル処理の影響を受けることなく、山側と里側との間での伝送するデータ量を低減することができる。
(もっと読む)
気象予測システム及びその同化処理方法
【課題】 レーダ波が遮蔽される観測不能領域での雨水量データの同化を適切に補正する。
【解決手段】 レーダ観測結果から予め高度別に区分された複数階層の雨水量データを取得しておく。同化開始により、下層雨水量データを取り込んで(S31)、観測地点毎に雨の有無を判定し(S32)、雨があると判定された場合には、その地点の下層全てについて水蒸気同化を行う(S33)。この水蒸気同化処理が完了した場合、またはS32で雨はないと判定された場合には、上層雨水量データを取り込んで(S34)、再度、雨水量を閾値と比較して雨がの有無を判定する(S35)。S35で雨があると判定された場合には、雨が観測された地点の下層のうち、水蒸気同化を一度も行っていない地点に対して水蒸気同化を行った後(S36)、S34に戻り、次の階層の雨水量データを取り込む。また、S35で雨はないと判定された場合には、データ同化処理は完了したものとする。
(もっと読む)
無線ICタグによる位置情報取得システム
【課題】GPSでは位置情報の取得ができない地下や建物内及び市街地内の各要所に、位置情報の書き込まれた無線ICタグを設置し、それらの情報を移動体側で無線ICタグリーダーを使用して取得することで、どこでも位置情報を取得可能とするシステム。
【解決手段】▲1▼無線ICタグを地下や建物の中、更には市街地内等の各要所に設置することで、これらの場所での位置情報取得を可能とする。▲2▼無線ICタグを高密度に設置することで、携帯電話基地局電波より算出される位置精度よりも高精度な位置情報取得を可能とする。また、高さ方向に対しても同程度の高精度な位置情報取得を可能とする。▲3▼安価な無線ICタグを使用することで、安価にインフラの整備を実現する。
(もっと読む)
近距離場位置測定システムおよび方法
ヌル軸が垂直であり、かつ、水平面などの対象となる平面内にヌル軸が位置するように配置された、2つの磁気アンテナを利用することによって位置を特定するために、近距離場信号特性が使用される。2つのアンテナは、送信アンテナまたは受信アンテナとして使用されてもよい。アンテナを直交方式で駆動することによって、対象となる平面内で全方向性パターンの均等物を生成するように、アンテナは駆動されてもよい。直交駆動は、時間直交または位相直交であってもよい。位置は、伝搬特性を含んでもよい近距離場応答に基づいて特定され、伝搬特性は、振幅、位相、相対的な振幅、または位相、あるいはその他の特性を含んでもよい。一実施形態では、1つの受信機の位置を特定するために、複数の送信機が利用される。別の実施形態では、1つの送信機の位置を特定するために、複数の受信機が利用される。空間効率的な磁気アンテナが開示される。 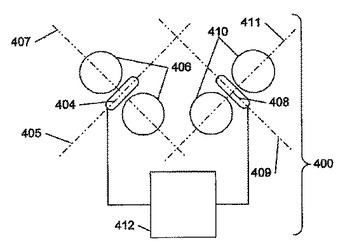 (もっと読む)
(もっと読む)
合成開口を用いた無線ベースの位置決定システム
本発明は、移動局および少なくとも1つの位置固定局を有する無線ベースの位置決定システムの測定精度を高める方法に関する。本発明の特徴は、
− スタート位置から出発した上記の移動局の運動を絶対センサシステムおよび相対センサシステムの測定データによって検出し、
− この測定データを用いて開口合成の形態で仮想アンテナを形成し、
− この開口合成を使用することによって、前記の移動局を位置固定局に、および/またはこの逆に互いに焦点合わせすることである。  (もっと読む)
(もっと読む)
モードSトランスポンダ送信信号解読装置及びモードSトランスポンダ送信信号解読方法
【課題】モードSトランスポンダから送信された信号を正確に解読することが可能なモードSトランスポンダ送信信号解読装置及びモードSトランスポンダ送信信号解読方法を提供する。
【解決手段】モードSトランスポンダ送信信号に対して微分処理を行う微分処理部43と、微分処理がなされた信号における強度の上昇変化率と下降変化率との相関の度合を演算する相関演算部44と、相関演算処理により得られた相関の度合に基づいてパルスを再生するパルス再生部45と、再生されたパルスに対してゲート処理と位相同期処理とを行うパルス位相同期部46と、ゲート処理と位相同期処理とがなされたパルスを基にモードSトランスポンダ送信信号を解読するパルス解読部47とを設ける。
(もっと読む)
後方散乱に基くトランスポンダの位置を測定する方法
本発明は、後方散乱に基くトランスポンダの位置を測定する方法に関する。本発明に寄れば、この方法は、基地局(BS1)により不変調搬送波信号(TS)を送信し、トランスポンダ(TR1)が基地局(BS)の応答範囲へ入る時、基地局(BS1)から送信される搬送波信号(TS)の位相変調及び後方散乱により発生される位置測定信号(OS)を、トランスポンダ(TR1)により送信し、位置測定信号(OS)に基いてトランスポンダ(TR1)の位置を測定する段階を含んでいる。例えば物品経済組織における使用。 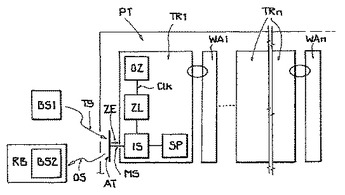 (もっと読む)
(もっと読む)
測距システム、及び測距方法
【課題】 距離測定の精度を向上させることができるRTT方式の測距システム、及びこのような測距システムに利用される測距方法を提供する。
【解決手段】 無線信号を互いに送受信するアクセス端末と送受信端末とを備えた測距システムにおいて、応答信号の送信を要求する要求信号を送信し、要求信号が送信されてから応答信号が受信されるまでの時間を測定し、その測定された時間に基づき送受信端末までの距離を算出するアクセス端末と、アンテナ301により受信された無線信号から中間周波数信号を生成するRFIF変換部304と、その中間周波数信号の信号レベルを検出する受信信号強度計測部307と、その検出された信号レベルに基づいて応答信号をアンテナ301から送信する応答送信制御部312とを備えた。
(もっと読む)
測距システム,送信端末,受信端末,測距方法,およびコンピュータプログラム
【課題】 マルチキャリア伝送方式において測距の誤差を軽減することが可能な,測距システム送信端末,受信端末,測距方法,およびコンピュータプログラムを提供する。
【解決手段】 上記測距システム送信端末,受信端末,測距方法,およびコンピュータプログラムのうち,マルチキャリア伝送方式における端末間の距離を測定する測距システムは,パケットの送信時及び/又は受信時のデータが高速離散フーリエ変換され,さらに所定処理後の周波数領域のデータに対して,スペクトル推定アルゴリズムを適用することで,インパルスレスポンスを取得する周波数領域データ処理部(212)とを備えている。
(もっと読む)
マルチレーダシステム及びその制御方法
【課題】マルチレーダシステムの管制所に、航空機の正確な位置を正確に表示する。
【解決手段】GPS衛星1からのGPS信号をGPSアンテナ21、22で受信し、GPSクロック受信機31、32が正確な標準時刻(任意のタイムゾーン)をNTP(ネットワークタイムプロトコル)にてLAN91、92に出力する。LAN91、92に接続される信号処理プロセッサ41、42は、GPSクロック受信機31、32から出力される標準時刻を使用して、自身のシステムクロックを較正する。タイムスタンプ生成部101、102では、レーダ51、52で検出した航空機の位置情報に、航空機を検出した時刻をGPSクロックによるタイムスタンプとして付与する。タイムスタンプを付与された航空機位置データは、WAN6経由で情報処理装置7に伝送される。情報処理装置7では、レーダからの航空機位置データに対して、追尾処理(相関、予測、虚偽目標棄却)、位置算出処理を実行する。
(もっと読む)
位置検出システム
【課題】IDを読み取る際にIDタグリーダの直線偏波アンテナの偏波面を各々のIDタグの直線偏波アンテナの偏波面に合わせることで、IDタグリーダの位置をさらに高精度に検出することができる位置検出システムを提供することを課題とする。
【解決手段】本発明にかかる位置検出システム1は、直線偏波アンテナ10aを有するIDタグ10から発信されたIDを直線偏波アンテナ20aを有するIDタグリーダ20で読み取り、読み取られたIDに基づいて当該IDタグリーダ20の位置を位置検出装置30で検出する。
(もっと読む)
ベースステーションと可動対象物との間の距離を決定するための方法及びその方法のためのベースステーション及び確認システム
【解決手段】本発明は、ベースステーション(SLG)と可動対象物(DT1〜DT3)との間の距離を決定するための方法、特に例えば発送システム、輸送システム又は製造システムにおける物体に関連する状態データ及びプロセスデータ又はそのいずれか一方を検出するため物体に取付けられた可動対象物としての少なくとも1つの可動データメモリを有する確認システムにおける距離決定方法に関する。本発明方法においては、高周波搬送周波数(fo)とオフセット周波数(df)とがIQ変調のために設定される。高周波搬送周波数は時間的に順次オフセット周波数だけ高められ、また低められることにより、変調された高周波搬送信号(TS)に生じる高周波搬送ベース周波数(fo+df、fo−df)が周波数変化の際同位相を有する。高周波搬送信号(TS)は引き続いて送出され、同時に、移動対象物により後方散乱された高周波搬送信号(RS)は搬送波位相信号(PS)と混合される。両高周波搬送ベース周波数(fo+df、fo−df)に対し、所属の搬送波位相(PH1、PH2)が時間的に順次求められ、次いでその差(dPH)からベースステーションと各移動対象物との間の距離が決定される。  (もっと読む)
(もっと読む)
統合されたデータ伝送手段を備えたレーダ装置
本発明は、たとえば自動車で使用するための、1つ以上の個々のレーダからなるレーダ装置に関する。前記個々のレーダの少なくとも1が、同時に操作され得る、感知要素及びデータ通信要素の両方を含む。 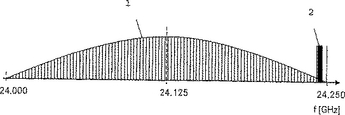 (もっと読む)
(もっと読む)
トランスポンダー用の超高周波テスト素子
本発明は、接合サポートの領域上または該領域内に二次元で前後左右に配置されているトランスポンダー用の超高周波テスト素子に関する。そのテスト素子は、少なくとも1つの超高周波アンテナ素子(3)を用いて超高周波機能と他のトランスポンダー(2)データとをチェックするために使用される。アンテナ素子(3)は、シールド筐体(4)内に配置されており、そのシールド筐体は、超高周波にシールドするような態様で作用し、チェックされる選択されたトランスポンダー(2)に面する開口部(5)が提供されている。開口部(5)は、トランスポンダー(2)の底表面領域に適合した領域を有する。  (もっと読む)
(もっと読む)
追尾装置及び追尾処理方法
【課題】中央の追尾フィルタとローカルセンサの制限された伝送容量を持つ環境においてもセンサシステム全体の高い追尾性能を得る。
【解決手段】目標群11を観測して目標の運動諸元を推定するセンサ群12と、センサ群からの情報を用いてセンサの優先度を算出する航跡情報評価器13と、センサの優先度に基づいて各センサから伝送する情報の出力内容並びに伝送容量を制御する通信伝送量評価器14と、センサ群12からの出力内容並びに伝送容量が制御された情報を入力し、各目標毎並びに各センサ毎に整理する観測情報・航跡情報統合器15と、各目標毎並びに各センサ毎に整理された情報を用いて各目標毎に追尾計算を行い目標の航跡情報を更新する中央の追尾フィルタ16と、各目標の更新後の航跡情報および各目標毎並びに各センサ毎に整理された観測情報を用いてセンサと目標に係る評価値を算出してセンサ群の動作を制御する追尾性能評価器17とを備える。
(もっと読む)
位置検索装置、位置検索システム、位置取得装置、位置検索方法、位置収集装置、位置収集方法、プログラムおよび記録媒体
【課題】簡易に使用でき製品がいつどこに置かれていたかを覚えているがその製品名を正確に思い出せない場合であっても使用できる製品の位置検索システム等を提供する。
【解決手段】位置検索装置10を過去に物体OBJが存在したと思われる地点Aへ向けて入力装置16等を押下すると検索開始指示情報が入力される。光線放射部22が照射光源12に光線70を放射させて地点Aを指示し装置位置算出部23が位置センサ11を用いて位置検索装置10の位置情報を算出する。測定部24が測定装置13に対し地点Aとの距離R、仰角θ及び方位角αを測定させ地点位置取得部25は上記位置情報と距離R等に基づき地点Aの位置情報を求める。検索部26は上記地点Aの位置情報及び入力された時期情報に照合する履歴を存在位置履歴記録部40から検索し出力部27は当該履歴中で最新の時期情報に対応する位置情報を物体OBJの現在位置として出力装置15へ出力する。
(もっと読む)
通信システム
【課題】 2つの通信端末間の通信距離を正確に測定可能な通信システムを提供する。
【解決手段】 通信システムは、無線通信空間に配置された送信機と受信機とを備える。送信機は、無線通信空間の空き期間の始端(タイミングt1)に同期してデータDATTの受信機への送信を完了する。受信機は、送信機からのデータDARRの受信を完了すると、自己の応答時間Trespを計測し、応答時間Trespの計測が終了すると(タイミングt3)、応答時間Trespを含むデータDARTの発信機への送信を開始する。発信機は、タイミングt4で受信機からのデータDARTの受信を開始し、タイミングt1からタイミングt4までのトータル時間を計測し、その計測したトータル時間と、受信機から受信した応答時間Trespとに基づいて受信機との間の通信距離を決定する。
(もっと読む)
中継方式障害物検出システムおよび方法
【課題】 コストを抑えて通信経路網を増やすことにより解像度を高めたり検出範囲を拡大することが可能な障害物検出システムを提供する。
【解決手段】 本障害物検出システムは、親局、1以上の中継子局および受信子局を備える。親局は、中継に使用する第1の子局の1つを指定する第1の局識別情報と送信先である第2の子局を指定する第2の局識別情報とを含むパケットを生成し、搬送波を発生し、中継に使用する第1の子局に向けてパケットを搬送波により送信し、中継に使用する中継子局が少なくともパケットを中継送信する期間は、搬送波の送信を継続する。中継子局は、到来する電波を受信して受信データを獲得し、受信データに含まれる第1の局識別情報が自局宛である場合に限り、親局から受信した信号を中継送信し、中継送信に続いて、パケットに付加する情報を送信する。受信子局の1つと親局との通信が正常に行われたと判断できる場合、その子局と親局との経路には障害物がないと判断する。
(もっと読む)
探索システム、探索対象端末、探索端末、探索方法、探索端末の制御方法、探索端末の制御プログラム及び探索端末の制御プログラムを格納したコンピュータ読み取り可能な記録媒体
【課題】探索対象者の位置を迅速に、かつ、精度良く把握することができる探索システム等を提供すること。
【解決手段】探索対象端末20は、位置情報衛星からの位置関連信号に基づいて現在位置を測位して探索対象端末の現在位置を示す探索対象位置情報を生成する探索対象位置情報生成手段と、励振信号に対応する応答信号を送信する応答信号送信手段等を有し、探索端末82は、探索対象位置情報に示される探索対象端末20の現在位置と探索端末位置情報に示される探索端末82の現在位置を比較する位置比較手段と、位置比較手段の比較結果に基づいて、探索対象端末20に対して励振信号を送信する励振信号送信手段と、探索対象端末20から励振信号に対応する応答信号を受信する応答信号受信手段と、応答信号の方向を特定する応答信号方向特定手段等を有する。
(もっと読む)
121 - 140 / 147
[ Back to top ]