
Fターム[5J070AA04]の内容
レーダ方式及びその細部 (42,132) | 一般 (555) | データ伝送(レーダリレー) (180)
Fターム[5J070AA04]の下位に属するFターム
Fターム[5J070AA04]に分類される特許
41 - 60 / 147
位置検出システム
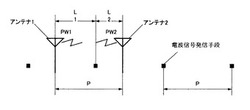
【課題】移動体側のアンテナが,複数の無線タグと通信しうる距離関係になった場合にも,上記移動体と無線タグとの相対位置を検知出来るようにした位置検出システムを提供すること。
【解決手段】前記複数の無線タグに対して相対的に移動する移動体に搭載され,各無線タグから発信された前記固有の識別情報を含む電波信号を受信する複数のアンテナを備えており,前記通信手段から上記電波信号発信手段への前記通信要求を含む電波信号の送信電力を変化させることによって,1つの電波信号発信手段と上記アンテナとの間で通信可能な限界の送信電力を検出し,検出された1つの電波信号発信手段と各々のアンテナとの間で通信可能な限界の送信電力から演算される各々のアンテナと上記1つの電波信号発信手段との距離の比率から前記アンテナと前記電波信号発信手段との相対位置を検出する位置検出システム。
(もっと読む)
通信機器及び通信機器の制御方法

【課題】工場出荷時における共振周波数f0の調整工程を省き、工場出荷後のユーザによる使用時において、共振周波数f0を好適に変更する機能を有する通信機器を提供する。
【解決手段】外部機器と所定の周波数で磁界通信を行う磁界アンテナ部50と、磁界アンテナ部50による外部機器との通信状態を監視するCPU72と、CPU72により監視された通信状態に応じて所定の周波数を変更するリアクタンス可変部52を有することを特徴とする。
(もっと読む)
位置情報通知装置
【課題】 使い勝手に優れ、しかもランニングコストの低減を図ることができる位置情報通知装置を提供する。
【解決手段】 装置本体1の電源として充電式電池2を使用し、また、装置本体1にACアダプタ8を接続可能とし、充電式電池2を満充電まで充電し、次の使用を可能にした。また、組み込まれる充電式電池2として、10C以上の電流で急速充電できるリチウムイオン二次電池が用いられことも特徴としている。
(もっと読む)
協調型飛翔体システム
【課題】同時に複数で飛来する目標の中から対象目標を特定した上で、これら対象目標に対して効果的に対処することのできる協調型飛翔体システムを得る。
【解決手段】電波により目標を検知する電波飛翔体と、光波により目標を検知する光波飛翔体とが互いに通信可能な範囲を飛翔しながら、電波飛翔体は、探知した目標の中から対処の対象となる目標候補を抽出して光波飛翔体に通知し、光波飛翔体は、この通知に基づき目標候補を詳細に観測して対処の優先度を評価した上で自身の対処すべき目標を特定し、この目標に向けて誘導飛翔する。一方、電波飛翔体も、光波飛翔体による目標候補に対する評価結果の通知を受けて自身の対処すべき目標を特定し、この目標に向けて誘導飛翔する。
(もっと読む)
不要追尾目標除去装置
【課題】本発明は不要な追尾目標の捕捉を防止する不要追尾目標除去装置を提供する。
【解決手段】レーダ機能に基づき追尾目標を追尾する追尾制御手段30に対し不要な追尾目標を除去する制御を行う不要追尾目標除去装置3Aである。追尾目標の追尾目標距離情報及び追尾目標方位情報と、レーダ設置位置の緯度経度情報に基づき追尾目標の緯度経度を算出する追尾目標位置情報算出手段62と、追尾目標位置情報を基点とする追尾目標周辺領域を生成する追尾目標周辺領域生成手段63と、電子図データを構成する図形構成要素の特徴をもとに、図形構成要素と追尾目標周辺領域との包含関係を判定し、追尾目標周辺領域内に図形構成要素が含まれると判定すると追尾中止命令を出力する包含関係判定制御手段を含む。
(もっと読む)
屋内迷子捜索システム
【課題】引率者からはぐれてしまった人の現在位置を精度良く特定する屋内迷子捜索システムを提供する。
【解決手段】屋内迷子捜索システムは、登録した人が履く靴の靴底に付けら且つ個体識別番号が記憶されたRFIDカードと、床面に設置され且つ上記登録した人が履く靴の靴底が接近したときに上記RFIDカードから個体識別番号を読み取るリーダと、屋内を見渡せる箇所に設置され且つ捕捉した人の位置を検出するレーダと、上記リーダの設置位置と上記レーダが捕捉した人の位置との相関を求めるとともに相関が認められるときには上記レーダが捕捉した人が上記RFIDカードを付帯していると判定し上記個体識別情報および位置情報を含むリーダ・レーダ情報を送出し、且つ相関が認められた位置に居る人を以後上記レーダおよび上記リーダにより追尾し上記リーダ・レーダ情報を送出する検索者検出装置と、を有する。
(もっと読む)
接近通報用のレーダ波中継装置
【課題】見通しの悪い交差点などにおける車両(移動物体)の出会い頭の衝突を防止する。
【解決手段】移動物体からのレーダ波を受信するレーダ波受信部21Aと、該レーダ波受信部21Aで受信されたレーダ波を該移動物体に向けて折り返し送信する折り返し送信部23Aと、該折り返し送信部23Aから送信された折り返しレーダ波の該移動物体での反射波を受信する反射波受信部25Aと、該折り返しレーダ波と該反射波とから該移動物体の速度情報に応じた周波数信号Δfaを検出する速度情報検出部26Aと、該速度情報検出部26Aにて検出された前記周波数信号Δfaと該レーダ波が送信されてきた方向とは異なる他方向に位置する他の移動物体からの折り返しレーダ波とをミキシングして前記他方向へ送信する速度情報付加送信部30Bとをそなえる、ようにする。
(もっと読む)
測距システム及び測位システム
【課題】移動局と基地局との間における通信に要した往復の伝搬時間を的確に測定できる測距システムと、往復の伝搬時間から移動局の位置を的確に決定することができる測位システムを提供する。
【解決手段】移動局は、基地局が発した一の指令を受信したことに基づいて、既に移動局から発している信号の状態を変化させて送信する。
(もっと読む)
ID発信装置設置位置情報の登録システム、装置、方法およびプログラム
【課題】ID発信装置と管理システムの間にネットワークを有しないシステムにおいても、設置位置情報の登録を支援可能とするID発信装置設置位置管理システムを提供する。
【解決手段】実際に作業者がID発信装置100の設置時やID発信装置100の動作確認の際に、ID発信装置100から送信されるID情報を受信可能で、かつ、登録操作を行うことが可能な作業者端末200を用いることにより、その場で設置位置情報の登録を可能とする。
(もっと読む)
携帯通信端末および近距離内通信相手探索方法
【課題】相手の携帯通信端末と自分の携帯通信端末との距離や方角などの位置情報をより外乱の影響を受けにくい精度の高い方法によって得ることができる携帯通信端末および近距離内通信相手探索方法を提供する。
【解決手段】携帯通信端末であって、基地局を介して公衆網に接続する無線公衆網通信手段と、通信相手との伝播時間に基づく距離計測および通信相手からの電波の受信信号強度計測を前記基地局を介さないで直接的に行なう近距離無線通信手段と、を具備する構成となっている。
(もっと読む)
RFIDタグとRFIDタグ通信装置における通信制御方式
【課題】複数台のRFIDタグ通信装置の通信による相互干渉を抑えるため送信電力を最小にする制御を行い、安定した通信を行う。
【解決手段】RFIDタグ通信装置の通信範囲に固定的にRFIDタグを配置し、識別対象のRFIDタグが通信範囲にない場合は固定的に配置したRFIDタグが通信可能な最小の送信電力でRFIDタグ通信装置を動作させることで他のRFIDタグ通信装置への干渉を最小にする。識別対象のRFIDタグがRFIDタグ通信装置の通信範囲に移動した場合には、固定的に配置しているRFIDタグの通信成功確率が落ちるため、RFIDタグ通信装置の送信出力を上げる制御を行う。識別対象のRFIDタグがRFIDタグ通信装置の通信範囲外に移動して固定的に配置しているRFIDタグの通信成功確率が上がった場合は、RFIDタグ通信装置の送信出力を下げる制御を行う。
(もっと読む)
無線携帯機及び車両存在方向報知システム
【課題】 視覚ないし聴覚に頼ることなく、自車両を容易に見つけ出すことができる車両用の無線携帯機及び車両存在方向報知システムを提供する。
【解決手段】 無線携帯機10は、受信部12により特定車両20から存在方向特定情報を無線取得するとともに、取得された存在方向特定情報に反映される車両20の存在方向を、触感により識別可能な方向報知情報を伝達する触感伝達手段14により報知する。
(もっと読む)
多センサ処理
多センサ処理の方法は、第1のセンサシステムにおいて、第2のセンサシステムからトラックデータを受信すること、第1のセンサシステムからのトラックデータを第2のセンサシステムからのトラックデータと比較することであって、或る時間期間の間にトラックが第1のセンサシステムの視野内に存在することになるか否かを判断する、比較すること、第1のセンサシステムにおいて、トラックデータに基づいてトラックの予測品質を求めること、及び、当該トラックの予測品質をブロードキャストすることを含む。本方法は、第2のセンサシステムからトラックの予測品質を受信すること、並びに、第1のセンサシステムによって求められたトラックの予測品質、及び第2のセンサシステムから受信されたトラックの予測品質に基づいて第1のタスクのセットを決定することも含む。 (もっと読む)
接近通報用のレーダ波中継装置および表示装置
【課題】見通しの悪い交差点などにおける車両(移動物体)の出会い頭の衝突を防止する。
【解決手段】移動物体からのレーダ波を受信し、受信したレーダ波を当該レーダ波が送信されてきた方向とは異なる方向に変更して送信し、送信したレーダ波の反射波を受信し、受信した該反射波を該移動物体に向けて送信し、該レーダ波を受信したのち、該レーダ波の送信周期と当該レーダ波中継装置1B内の遅延時間とに基づく遅延時間分、該レーダ波についての反射波の送信を遅延させる。
(もっと読む)
位相ベースの検知システム
【課題】運動、面の不規則性、周囲の状況、及び生理的状態を非接触で検知するシステムにおいて、使用する波長以下の分解能で検知対象物の情報を得る。
【解決手段】物体の相対運動を検知および測定するためのシステムが、信号を物体に伝送するように構成されたトランシーバ装置と、基準信号および反射信号の振幅を測定する互いに位相がずれた複数の検知器と、複数の検知器における基準信号と反射信号の変化を、対象物の相対運動により生じる位相の変化に数学的に関連づける論理を有して構成されたプロセッサとを含み、プロセッサはさらに、位相の変化を対象物の相対運動に数学的に関連付ける論理を有して構成される。
(もっと読む)
位置情報収集装置
【課題】広い範囲をカバーでき、多数の無線端末を管理可能であると共に、有用な集計データを出力可能な位置情報収集装置を提供すること。
【解決手段】位置情報収集装置は、無線通信機能を備え、ID情報を含む信号を繰り返し送信する端末装置20、無線通信機能を備え、予め下流および上流のアクセスポイント装置を記憶しており、端末装置あるいは下流のアクセスポイント装置からのデータを受信し、自IDを付加して上流のアクセスポイントに転送するアクセスポイント装置16〜19、最上流のアクセスポイント装置15から有線通信により信号を受信し、時刻情報を付加して記録するサーバ装置10とを備える。予め定められた1本道のルート25〜28に沿ってデータが転送されるので、収集データの転送によるトラフィックの爆発的増加を抑制し、多数の端末を収容して位置情報を短い周期で収集可能である。
(もっと読む)
移動体情報共有システム
【課題】 搭載スペースの限られた移動体間において、高精度かつ信頼性の高い移動体情報共有システムを提供する。
【解決手段】 複数の移動体と、これら複数の移動体と共に移動して無線ネットワークを構成する大型移動体と、前記複数の移動体及び前記大型移動体が移動する空域を監視してその監視結果をPP通信ネットワークにより前記大型移動体に送信する管制レーダ装置とを備えた情報共有システムにおいて、前記大型移動体は、前記複数の移動体及び前記管制レーダ装置により取得されたレーダ情報及び自己が取得したレーダ情報を相関処理して前記空域内を移動する移動体の位置情報を算出し、前記複数の移動体は、前記大型移動体により算出された前記空域内を移動する移動体の位置情報を前記無線ネットワークを介して取得し、その取得した移動体の位置情報を自己の表示手段にシンボル表示する。
(もっと読む)
モードS二次監視レーダ
【課題】監視空域内に存在する航空機(トランスポンダ)を適確に捕捉し、航空機を安全に飛行させるモードS二次監視レーダを提供する。
【解決手段】質問を送信する送信制御手段131と、ATCRBS機及びモードS機から質問に対して送信された応答を受信する受信手段123と、受信した各応答が含む位置情報について相関を求める相関処理手段135aと、受信した応答を分類する分類手段135bと、相関処理及び分類の結果から、質問に対して受信したATCRBS応答がATCRBS機から送信されたものであるか否かを判定する判定手段135cと、判定の結果に基づいて監視空域を飛行する航空機の状態に関するレポートを生成する生成手段135dとを備える。
(もっと読む)
ブイ型レーダ装置及びブイ型レーダシステム
【課題】 山などの障害物や民家や放送局のある方向など、電波輻射が制限される領域においては、他の艦船搭載のレーダ装置や陸上に設置されたレーダ装置が存在せず、艦船搭載のレーダ装置だけでは目標を直接探知できない。
【解決手段】 海上にブイとして浮遊可能なブイ型レーダ装置を探知したい海域に設置する。ブイ型レーダ装置には自らの位置及び姿勢を検出する位置姿勢測定装置、レーダ装置の観測情報により生成した目標情報を登録する目標情報データベース、目標情報を艦船や他のブイ型レーダ装置に送受信する通信装置を備える。これによりブイ型レーダ装置は、海上に浮遊しながら目標の捜索、探知、追尾を行い、目標情報を通信装置により艦船等に伝達し、艦載搭載のレーダ装置では直接探知できない領域の目標が探知可能となる。
(もっと読む)
送受信装置
【課題】ワンチップ化されたインパルス送信部とインパルス受信部とを有し、小型・低消費電力で測位、測距及びデータ通信が可能な送受信機を提供することを課題とする。
【解決手段】空間内における送受信機1の位置を測定することのできる測位システムに送受信機1を利用する場合、受信部20は、受信したインパルスラジオ信号を復調し、制御部30に送る。制御部30は、自機に対する指令であるか判定する。送信部10は、PN符号を用いて拡散変調処理及びRZ変換処理を実行し、測位システム側から要求された所定のデータをRZ変換して得るインパルスラジオ信号をアンテナ50から送信する。また、受信機1は、自機から特定の対象物に対して送信したインパルスラジオ信号を自機で受信し、その対象物との距離を測定することができる。このような測距処理に必要な演算は、制御部30で行われる。
(もっと読む)
41 - 60 / 147
[ Back to top ]