
Fターム[5J070AF05]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 船舶 (192)
Fターム[5J070AF05]に分類される特許
21 - 40 / 192
周波数検出装置及び周波数検出方法
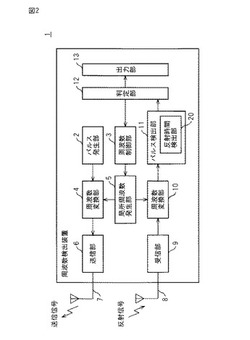
【課題】無線信号の搬送周波数の検出において瞬時的な雑音や不要波成分による誤検出を低減する。
【解決手段】周波数検出装置1は、パルス信号を送信する送信部6と、信号を受信する受信部9と、送信部6により送信され物体70で反射して受信部9により受信されたパルス信号を追跡することによりパルス信号の反射時間を検出する検出部11と、反射時間が所定範囲内であるか否かを判定し、反射時間が所定範囲内でない場合にパルス信号の搬送周波数を検出対象の搬送周波数と判定する判定部12を備える。
(もっと読む)
代表位置検出装置、表示装置、レーダ装置、代表位置検出方法及び代表位置検出プログラム

【課題】物標の位置を精度よく検出することができる代表位置検出装置、表示装置、レーダ装置、代表位置検出方法及び代表位置検出プログラムを提供する。
【解決手段】画像データ生成部21が物標で反射したエコー信号に基づいて生成した画像データに対して、領域設定部22は、画像データの各画素の輝度に基づいて、物標を含む検出領域を画像データに設定する。画素選択部23は、設定した検出領域を構成する画素から、輝度が高い順を複数選択し、代表点検出部24は、画素選択部23が選択した画素の位置に基づいて、代表位置を検出する。
(もっと読む)
レーダ信号処理装置およびレーダ画像処理装置
【課題】本発明は、レーダ装置において、目標から到来した無線信号にその目標に所定の信号処理を施すレーダ信号処理装置と、目標の指示に必要な画像情報を生成するレーダ画像処理装置とに関し、目標の姿勢、移動方向、距離および方位の如何にかかわらず、その目標が地理的または物理的に占有する領域の識別を精度よく安定に実現できることを目的とする。
【解決手段】照射された送信波に対する応答として無線信号を放射しまたは反射する目標の姿勢または移動方向を示す参照情報を外部から取得し、前記無線信号の受信に供される空中線系と前記空中線系に対する既定の方向とを基準として前記参照情報を評価する目標評価手段と、前記目標の距離および方位の下で前記参照情報の評価の結果を前記目標が占有する領域として識別する目標識別手段とを備える。
(もっと読む)
レーダ用アンテナ、及びレーダ装置
【課題】放射素子から放射されるレーダ波に影響を与えないように伝送線路の放射損を抑制するレーダ用アンテナ、及びレーダ装置を提供することを課題とする。
【解決手段】レーダ用アンテナ1であって、誘電体5を挟んで導電板4上に載置された複数の放射素子2が、該導電板4上で伝送線路7に繋がるアンテナ本体3と、伝送線路7を覆う導電性の膜9がアンテナ本体3側に成膜された、該アンテナ本体3を覆うレドーム6と、を備える。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】スキャン相関によって物標のエコーが弱まることを防止する信号処理装置を提供する。
【解決手段】信号処理部17は、物標検出部16が物標を検知した地点に対応するスキャン相関後のエコー信号のレベルを調整する。具体的には、物標検出部16が物標を検知した各地点を中心としてガウス関数に基づく特性でレベル調整を行う。物標が検出された地点では、強いエコー信号が検出されていることになるため、その地点のエコー信号をレベル調整(強調)することで、高速で移動する物標のエコー信号がスキャン相関によって弱まったとしても、高いレベルで出力することができる。また、ガウス関数に基づく特性でレベル調整を行うため、ある地点だけ極端にエコー信号が強調されてしまうことを防止することができる。
(もっと読む)
エコー画像表示装置、エコー画像表示方法、およびエコー画像表示プログラム
【課題】表示する情報量を向上させたエコー画像表示装置を提供する。
【解決手段】制御部19は、表示部の表示領域の一部に設定された所定領域の分解能を変更する。分解能を変更するには、例えば、所定領域内における電磁波の所定方位あたりの発射回数を変更する手法がある。この場合、制御部19は、送信部10に対し、指定された拡大領域502に対応する方位について、所定時間あたりの送信信号の出力回数を増加させる指示を行う。仮にレーダ画面上の全ての領域の分解能を向上させると、データ量が増大することになるが、本実施形態では、分解能を向上させる領域を表示領域の一部に絞り込むことで、データ量を抑え、装置の負荷を低減する態様としている。
(もっと読む)
探知装置、レーダ装置、探知方法、および探知プログラム
【課題】他の物標に囲まれている物標であっても検知することができる探知装置を提供する。
【解決手段】物標探知部15は、近接する複数方位のエコー信号を比較することで、各物標の端部位置を判定する。具体的には、図6(A)に示すように、注目サンプルデータRCurrの値が0であり、同じ距離のスイープデータn−1のサンプルデータが0であり、1つ前の距離(自船に近い位置)におけるサンプルデータRpreも0であり、かつ1つ前の距離におけるサンプルデータRpreと同じ距離のスイープデータn−1のサンプルデータが1である場合、テーブルに記載されている各物標の端部位置を示す情報を検知結果として出力する。
(もっと読む)
レーダ装置及び物標検出方法
【課題】アンテナを回転して送信ビームを放射するレーダ装置及び物標検出方法において、各方位における送受信に要する時間を長くすることなく、クラッタなどからの物標の受信信号成分の分離を行ない易くすることである。
【解決手段】アンテナ20は、回転軸24の周りを回転しつつ各方位において、1パルスの送信ビーム25を放射して反射体からの反射エコーを受信する。仰俯角方向走査部30は、1パルスの送信ビーム25を、仰俯角に応じて周波数が異なるように、方位毎に仰俯角方向に走査する。受信部60は、周波数成分検出部62によって、アンテナ20で受信した受信信号の周波数成分から反射体の仰俯角を検出する。同時に、受信部60は、振幅成分検出部61によって、受信信号の時間成分から反射体の距離を検出する。
(もっと読む)
レーダ装置、注目物標検出方法及び注目物標検出プログラム
【課題】画像データから特定の注目物標の検出を精度よく行うことを可能にするレーダ装置、注目物標検出方法及び注目物標検出プログラムを提供する。
【解決手段】記憶部14に、鳥エコー信号の特性に基づいて生成された鳥のテンプレート画像データ14Bを記憶する。画像処理部133は、受信したエコー信号に基づいて生成した入力画像データと、記憶部14に記憶されたテンプレート画像データ14Bとのパターンマッチングを行い、入力画像データから鳥が含まれた領域を抽出する。
(もっと読む)
物標探知方法、物標探知プログラム、物標探知装置、およびレーダ装置
【課題】レインクラッタ等のランダム性の高いクラッタを、正確且つ効果的に抑圧できる物標探知方法を実現する。
【解決手段】対象の極座標位置を含む所定範囲の探知データ値を取得する(S101)。方位方向に隣り合う探知データ値の差を算出して、値の変動を検出し(S102)、設定対象の極座標位置に対する変動カウントCnvを算出する(S103)。変動カウントCnvが閾値Thよりも高ければ(S104:Yes)、設定対象の極座標位置のマスク画像データ値を最高値に設定する(S105)。変動カウントCnvが閾値Th以下であれば(S104:No)、設定対象の極座標位置のマスク画像データ値を最低値に設定する(S108)。マスク画像データの平滑化処理を行い(S106)、探知データ値から平滑化処理後のマスク画像データ値を減算する(S107)。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法及び信号特定プログラム
【課題】入力信号から不要な信号を除いて、物標での反射によるエコー信号を検出する信号処理装置、レーダ装置、信号処理方法及び信号特定プログラムを提供する。
【解決手段】物標での反射によるエコー信号を受信信号から検出する信号処理装置において、信号レベル検出部21で入力信号の信号レベルを検出し、立ち上がり検出部22で入力信号におけるエコー信号の立ち上がりを検出する。検出した立ち上がりの開始時以降における信号の信号レベルの最大値を閾値決定部25で特定する。特定した最大値に基づいて、エコー信号検出部26で物標での反射によるエコー信号を検出する。
(もっと読む)
レーダ装置
【課題】本発明は、単純パルスレーダ方式およびパルス圧縮レーダ方式が併用され、広範なレンジにおいて目標の検出を実現するレーダ装置に関し、従来例に比べて、構成が大幅に変更されることなくかつより高い確度で安定に擬像の発生を回避できることを目的とする。
【解決手段】パルス圧縮レーダ方式に供される第一の送信波と単純パルスレーダ方式に供される第二の送信波とを交互に送信する送信手段と、前記第一の送信波と前記第二の送信波とに対する反射波が目標から到来した時刻に基づいて、前記目標を検出する目標検出手段とを備え、前記送信手段は、前記第一の送信波の末尾と、前記第一の送信波の後に送信される前記第二の送信波の先頭との時間軸上における間隔を切り替え、前記目標検出手段は、前記第二の送信波に対して前記目標から到来し得る反射波の占有帯域に分布する複数回毎の成分の相関に基づいて前記目標を検出する。
(もっと読む)
レーダ装置
【課題】簡単な回路構成で安価なレーダ装置を得る。
【解決手段】送信信号を電磁波として放射し、目標物体5で反射した電磁波を受信信号として受信し、受信信号に基づいて、目標物体5までの距離を測定するレーダ装置1であって、送信信号と受信信号とを混合するミキサ32と、目標物体5までの距離に応じて、ミキサ32の電圧利得を制御する制御部4とを備えている。
(もっと読む)
目標追尾装置および目標追尾方法
【課題】目標追尾情報のうちから一部を選定して出力する目標追尾装置について、新たに選定された目標追尾情報が出力された当初から信頼性が高い状態であって、さらには真に必要とされる目標追尾情報のみを選定して出力する目標追尾装置および目標追尾方法を提供する。
【解決手段】目標探知範囲に存在する全目標を捕捉する全目標捕捉部と、前記全目標捕捉部によって捕捉された全目標の追尾を常に行ってそれぞれの目標追尾情報を第1の目標追尾情報として出力する全目標追尾部と、前記全目標の中から指定された条件に合致する目標の目標追尾情報のみ前記全目標追尾部の出力から選定して出力するための前記条件が入力される条件入力部と、前記第1の目標追尾情報が入力され、前記条件入力部への入力によって選定された目標についてのみ第2の目標追尾情報として出力する出力情報選定部と、を備える。
(もっと読む)
航法補完装置およびレーダ装置
【課題】本発明は、レーダ装置によって行われた測距または測位の結果を他のレーダ装置によって行われた測距または測位の結果で補完する航法補完装置と、その航法補完装置の機能を所定の機能分散の下で実現するレーダ装置とに関し、従来例に比べて構成が大幅に変更されることなく、至近点に位置する目標の裏に生じる死角を緩和し、または回避できることを目的とする。
【解決手段】異なる位置で距離または位置の測定を個別に行う第一のレーダ装置と第二のレーダ装置との間における連係を通信路を介して行う連係手段と、前記第一のレーダ装置および前記第二のレーダ装置の内、一方によって行われた測定の結果を他方によって行われた測定の結果で補完する補完手段とを備る。
(もっと読む)
干渉除去装置、信号処理装置、レーダ装置、干渉除去方法およびプログラム
【課題】干渉信号を正確に除去することを可能とする。
【課題手段】複数の複素受信信号を記憶するメモリ331と、複数の複素受信信号から干渉信号を検出する検出器333と、複数の複素受信信号に基づいて干渉信号を含む複素受信信号の物標信号成分を算出する算出器3341、および、当該複素受信信号を物標信号成分に置き換える置換器3342を有する推定器334とを備え、算出器3341は、複数の複素受信信号の振幅に基づいて物標信号成分の振幅を決定する振幅決定器33411と、複数の複素受信信号の位相に基づいて物標信号成分の位相を決定する位相決定器33412とを有する。
(もっと読む)
航行援助装置
【目的】
本発明は、船舶で航行中に危険物標や他船舶が自船予想針路上に出現または横断する可能性が発生した場合、ARPA(自動衝突予防援助装置)やAIS(自動船舶識別装置)などの装置を通じてレーダより得た危険物標の情報や他船の位置・針路ベクトルなどの情報を取り込み、予想針路との最接近距離と到達時間であるCPA・TCPAを計算し危険シンボルを表示する方法及び装置に関し、予想された針路が安全かどうかを知らせることを目的とする。
【構成】レーダ空中線部より得られた探知物標画像、及び自船情報と他船情報と予想針路情報を用いて演算部にて各予想針路位置におけるCPA・TCPAの演算を行ない、前記演算の結果からアラーム判定を行ない判定の結果に応じた危険シンボルを表示部へ画面表示させる。
(もっと読む)
閾値設定方法、物標探知方法、閾値設定装置、物標探知装置、閾値設定プログラム、および物標探知プログラム
【課題】不要成分と物標とを識別する閾値を、物標の有無に影響されずに自動で設定する。
【解決手段】注目の距離位置[n]のエコー信号のレベルEcho[n]が、閾値レベルTh[n]よりも低ければ、注目の距離位置[n]の閾値レベルTh[n]を低く更新設定する。エコー信号のレベルEcho[n]が、閾値レベルTh[n]よりも高く、閾値レベルTh[n]が注目の距離位置[n]に対してアンテナ側に隣接する距離位置[n−1]の閾値レベルTh[n−1]よりも高ければ、閾値レベルTh[n]を低く更新設定する。エコー信号のレベルEcho[n]が閾値レベルTh[n]よりも高く、閾値レベルTh[n]が注目の距離位置[n]に対してアンテナ側に隣接する距離位置[n−1]の閾値レベルTh[n−1]よりも低ければ、閾値レベルTh[n]を高く更新設定する。
(もっと読む)
閾値設定方法、物標探知方法、閾値設定プログラム、物標探知プログラム、および物標探知装置
【課題】不要成分と物標とを識別する閾値を、物標の有無に影響されずに自動で設定する。
【解決手段】注目の距離位置[n]のエコーレベルEcho[n]と、近接位置[n−1]のエコーレベルEcho[n−1]との差分値diff[n]を算出する(S101)。差分値diff[n]が閾値γよりも高ければ(S102:Yes)、注目の距離位置[n]のエコーレベルEcho[n]と閾値レベルTh[n]とから新たな閾値レベルTh[n]を設定する(S105)。一方、差分値diff[n]が閾値γ以下であれば(S102:No)、注目の距離位置[n]のエコーレベルEcho[n]と閾値レベルTh[n]、および近接位置[n−1]の閾値レベルTh[n−1]とから新たな閾値レベルTh[n]を設定する(S106)。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】干渉以外のエコーに対する抑圧を低減しつつ、干渉成分を的確に除去することができる信号処理装置を提供する。
【解決手段】空間フィルタ172は、例えば鮮鋭化フィルタ等からなり、複数の過去のエコー信号を画像メモリ16から読み出し、注目サンプルの鮮鋭化を行う。例えば、注目サンプルy’(i,j)を囲む8画素のエコー信号を含む9画素についてのエコー信号を画像メモリ16から読み出し、鮮鋭化処理を行う。そして、相関処理部17は、画像データ生成部15から入力された最新のデータと、空間フィルタ処理後の過去のデータと、の重み付け加算を行う。
(もっと読む)
21 - 40 / 192
[ Back to top ]