
Fターム[5J070AF05]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 船舶 (192)
Fターム[5J070AF05]に分類される特許
61 - 80 / 192
信号処理装置、レーダ装置及び信号処理プログラム
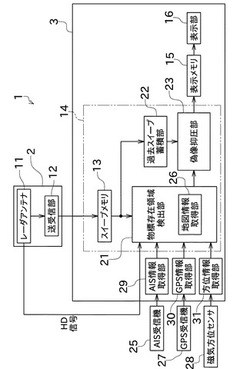
【課題】サイドローブによる偽像を抑圧することができる信号処理装置を提供する。
【解決手段】レーダ指示機3は、物標存在領域検出部21と、過去スイープ蓄積部22と、偽像抑圧部23と、を備えている。物標存在領域検出部21は、物標が存在する領域を検出する。過去スイープ蓄積部22は、方位方向に連続したレーダエコーを取得可能である。偽像抑圧部23は、方位方向に連続したレーダエコーから得られる情報に基づいて、前記レーダエコーに含まれる偽像を抑圧する処理を行うことが可能である。そして、偽像抑圧部23は、物標が存在する領域のレーダエコーに対しては、それ以外の領域のレーダエコーに対する処理とは異なる処理を行っている。
(もっと読む)
画像処理装置及び画像処理方法

【課題】
レーダ画像と、レーダ画像に真航跡処理が施された真航跡画像について、静止物標に関する外部情報を取得することなく、エコーの揺らぎによる影響を抑制した上で静止物標を除去する画像処理装置及び画像処理方法を提供する。
【解決手段】
レーダ信号処理の下で画像を生成する画像処理装置であって、レーダ画像と、前記レーダ画像に真航跡処理が施された真航跡画像との積集合として前記画像を得る演算手段を備えることを特徴とする。また、前記レーダ画像と前記真航跡画像とが二値化され、かつ両者の論理積が前記積集合として求められることを特徴とする。
(もっと読む)
単一アンテナFM/CW船用レーダ
【課題】運河などの非常に限定された空間で使用されることになる新規に規定された、はしけ/河川レーダなどの用途で使用するための高解像度、低出力船用レーダを提供する。
【解決手段】レーダシステム20は、単一スロット導波管アンテナと、アンテナと信号通信するサーキュレータと、送信機および前記アンテナへのインターフェースとなる前記サーキュレータの出力部に直接接続された受信機ミキサと、送信機信号のサンプルを使用して局部発振器信号を供給するように構成された構成要素と、前記局部発振器信号の到着時を漏洩または反射電力信号の少なくとも一方に関連した信号の到着時と一致させ、それによって前記受信機ミキサで位相雑音キャンセルを行うように構成された構成要素を含む、前記アンテナと信号通信する送受信機とを含む。非常に低い送信機出力を使用し、約90センチメートルの特別に短い感知距離を有するFM/CWレーダを含む。
(もっと読む)
信号処理装置、レーダ装置及び信号処理プログラム
【課題】受信信号の種類に応じて柔軟に信号処理を行うことが可能な信号処理装置を提供する。
【解決手段】レーダ指示機3は、受信信号取得部13と、種類識別処理部18と、種類別信号処理部20と、を備える。受信信号取得部13は、レーダアンテナ11が受信した受信信号を取得する。種類識別処理部18は、受信信号の種類を識別する。種類別信号処理部20は、受信信号を種類ごとに抽出する。また、前記種類別信号処理部20は、抽出された受信信号に対して、受信信号の種類ごとに個別の信号処理を行う。
(もっと読む)
アンテナ装置およびレーダ装置
【課題】大きい反射体と小さい反射体で、従来よりも実体的な大きさの差に近いエコーが得られるアンテナ装置を提供する。
【解決手段】導波管11の開口中心位置から2/3程度の開口分布を−20dBのチェビシェフ分布とし、残る1/3程度の開口分布を−40dBのチェビシェフ分布に設定する。そして、スロットのピッチの狭い箇所(スロット12A〜スロット12E)と広い箇所(スロット12E〜スロット12I)とを設けることで、管軸方向の途中で位相を上面方向に向かって凸状に曲げる態様とし、上記第1サイドローブをメインローブに内包させる態様とする。同程度のサイドローブ比を有するアンテナ装置で、チェビシェフ分布より3dB幅では狭ビーム、20dB幅では広ビームを実現することで、反射体の実体的な大きさの差に近いエコーが得られる。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】時系列的に取得された目標信号から得られる複数の目標位置に関するデータに基づいて目標の追尾を行う目標追尾において、従来のウィンドウを用いた場合に発生する目標の乗り移り、ロストといった問題を解消する。
【解決手段】あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行い、被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納する。
(もっと読む)
信号処理装置、レーダ装置、信号処理プログラム及び信号処理方法
【課題】簡単な構成で、不要信号を抑圧しつつ高速移動ターゲットの検出を可能とする信号処理装置を提供する。
【解決手段】信号処理部は、スイープメモリと、スキャン相関処理部11と、出力切替部12と、を備える。スイープメモリは、アンテナが受信した信号の信号レベルを示した受信データを取得する。スキャン相関処理部11は、受信データにスキャン相関処理を施したスキャン相関処理済データを出力する。出力切替部12は、受信データの信号レベルが所定の出力切替閾値以上である場合は当該受信データを出力し、受信データの信号レベルが出力切替閾値未満の場合はスキャン相関処理済データを出力する。
(もっと読む)
物標探知装置、物標探知方法、および物標探知プログラム
【課題】より正確なスキャン相関処理を行える物標探知装置を実現する。
【解決手段】物標探知装置100の相関処理部6は、スイープメモリ2に記憶された極座標系のエコーデータと、読出用メモリ70Bにて極座標系で記憶された前回スキャンのスキャン相関処理後記憶データとを、スキャン相関処理する。この際、アドレス決定部5は、アンテナ回転情報取得部3からのアンテナ回転情報と位置検出部4からの位置情報および船首方位とを用いて、スイープメモリ2からのエコーデータと、読出用メモリ70Bからのスキャン相関処理後記憶データとの座標系を一致させるように、読出アドレスを設定して、読出用メモリ70Bへ与える。書込用メモリ70Aは、アドレス決定部5により今回スキャンの基準タイミングの座標系で設定された書込アドレスに準じて、相関処理部6からのスキャン相関処理後データを記憶する。
(もっと読む)
画像処理装置、これを搭載したレーダ装置、画像処理方法及び画像処理プログラム
【課題】画像処理装置において、物標の接近を検出する簡素な構成を実現するとともに、接近物標が存在することをオペレータが直感的に把握できるように画像処理を行う構成を実現する。
【解決手段】レーダ装置5に搭載される画像処理装置10は、相対航跡用画像メモリ32と、相対航跡判定処理部33と、を備える。相対航跡用画像メモリ32は、当該レーダ装置5に対する物標の相対的な位置変化を示す相対航跡データ群として記憶可能に構成される。相対航跡判定処理部33は、相対航跡用画像メモリ32に記憶される相対航跡データ群のうち、同じスイープライン上に存在する画素の相対航跡データに基づいて、自船(レーダ装置5)に接近する接近物標を検出する。
(もっと読む)
画像処理装置、これを搭載したレーダ装置、画像処理方法及び画像処理プログラム
【課題】移動する物標を固定物標と区別して表示できる機能を簡易な構成で実現できる画像処理装置を提供する。
【解決手段】レーダ装置5に搭載される画像処理装置10は、真航跡用画像メモリ42と、移動物標判定処理部44と、を備える。移動物標判定処理部44は、真航跡用画像メモリ42に記憶される物標の絶対的な位置変化を示す真航跡データ群から、他船の航跡を示す画素情報の値であって、所定の条件を満たす画素情報の値を有するトリガ画素を探索する。そして、移動物標判定処理部44は、トリガ画素から、物標が存在することを示す所定値が画素情報として設定されている画素まで所定方向で連続する一連の画素において、画素情報の値が、トリガ画素の画素情報の値から所定値に近づく傾向を示している場合に、所定値が設定される画素を移動物標が存在する画素位置と判定する。
(もっと読む)
飛翔体探知方法及びシステムならびにプログラム
【課題】飛翔体の3次元位置を特定する飛翔体探知方法等を提供する。
【解決手段】地上を飛翔する飛翔体を撮影可能な観測器及び撮影画像を送信する送信器を備えた少なくとも2機の人工衛星と、送信された少なくとも2枚の画像データを受信するためのアンテナとアンテナにより受信した少なくとも2枚の画像データを解析して飛翔体の位置を解析する位置解析装置とを備えた基地局とで構成される飛翔体探知システムであって、位置解析装置は、各々の人工衛星の頂角及び方位角を算出する算出部と、これら頂角及び方位角から観測ベクトルを生成する観測ベクトル生成部と、各々の人工衛星の位置情報、速度情報等に基づいて座標変換行列を生成する座標変換行列生成部と、飛翔体位置初期値と座標変換行列とから係数を生成する係数生成部と、これら係数と観測ベクトルとから定められるパラメータ推定処理を実行するパラメータ推定処理部とを備えたことを特徴とする。
(もっと読む)
レーダトランスポンダ
【課題】不要な信号が出力されてしまうことを抑圧できるレーダトランスポンダを提供する。
【解決手段】パフォーマンスモニタ6は、周波数制御信号発生器25と、可変減衰器28と、を備える。周波数制御信号発生器25は、電圧制御発振器27に対して周波数制御信号を送信することにより、前記応答信号の周波数を、第2周波数から第1周波数に変化させる動作と、第1周波数から第2周波数に変化させる動作とを実現可能である。可変減衰器28は、前記応答信号の周波数が第1周波数から第2周波数に変化するときの少なくとも一部の期間は、当該応答信号の出力レベルを減衰させる。
(もっと読む)
物標探知装置および物標探知方法
【課題】変調パルス信号から得られる受信信号の飽和に起因する各問題を抑制できるレーダ装置を実現する。
【解決手段】送信部11は、通常処理として、無変調パルス信号のパルス状送信信号PSnと変調パルス信号のパルス状送信信号PMnとの組を所定のパルス群の繰り返し周期で送信する。受信部14で受信信号が飽和すると、飽和検出部16がこれを検出して、飽和情報を送信部11と画像形成部17へ出力する。送信部11は、飽和情報を取得すると、次の組のパルス状送信信号PSn+1の受信期間を延長し、パルス状送信信号PMn+1の送信を中止する。画像形成部17は、飽和したパルス状送信信号PMnのパルス圧縮後の信号を、次の組のパルス状送信信号PSn+1の受信期間における当該期間に対応する期間の受信信号に置き換えて画像処理用データを形成する。
(もっと読む)
擬似乱数出力装置、送信装置及び探知機
【課題】他の装置との間で類似することが少ない擬似乱数列を出力し得る擬似乱数出力装置を提供する。
【解決手段】船舶に搭載される擬似乱数出力装置20は、GPS受信機21と、擬似乱数発生部22と、を備える。GPS受信機21は、GPS衛星から測位信号を受信し、自船の位置等のデータを取得する。擬似乱数発生部22は、GPS受信機21が出力する緯度及び経度の情報を加工したものをシードとして用いることにより、擬似乱数を発生させる。擬似乱数発生部22から得られた擬似乱数は、船舶に搭載されるレーダ装置1において、レーダアンテナ14からパルス信号を送信する時間間隔を決定するために用いられる。
(もっと読む)
物標探知装置および物標探知方法
【課題】変調パルス信号から得られる受信信号の飽和に起因する各問題を抑制できるレーダ装置を実現する。
【解決手段】送信タイミング決定部111は、予備探知モード時に予備探知用のパルス信号PPnを送信するように送信制御し、送信部12から無変調パルス信号で送信する。探知範囲区分検出部112は、受信部15からの受信信号に基づいて、変調パルス信号による受信信号では受信部15で飽和する可能性のある飽和可能性物標の位置を検出し、メモリ113の送信制御用マップに記憶する。送信タイミング決定部111は、飽和可能性物標の位置に基づいて、飽和回避用の探知範囲を設定して、通常探知で変調パルス信号を用いる範囲であっても、無変調パルス信号を用いるように送信制御する。画像形成部17は、このような送信制御による無変調パルス信号の受信信号および変調パルス信号の受信信号のパルス圧縮後の信号に基づいて、探知画像を形成する。
(もっと読む)
受信装置および受信方法
【課題】受信装置および受信方法を提供すること。
【解決手段】放射体から発せられた信号を受信する第1の数(3以上の整数)のアンテナと、接続されているアンテナにより受信された前記信号に対するアナログ処理を行う第2の数(2以上の整数、第2の数<第1の数)のアナログ処理部と、1のアナログ処理部と1のアンテナを接続している間、他のアナログ処理部に接続するアンテナを順次に切り替える接続切替部と、前記1のアンテナを介して前記1のアナログ処理部により得られた信号と、同一時間帯に他のアンテナを介して前記他のアナログ処理部により得られた信号との伝達関数の差分を取得する伝達関数取得部と、異なる時間帯に得られた信号に基づいて前記伝達関数取得部により得られた前記伝達関数の差分の各々に、前記他のアナログ処理部と接続されていた前記他のアンテナに対応する指向用重みを乗算する乗算部と、を備える受信装置。
(もっと読む)
レーダ装置
【課題】陸や物標からのエコーを残し、雨雪反射のみを良好に抑圧することができるレーダ装置を提供する。
【解決手段】レーダ装置は、区間判定部11を備える。区間判定部11は、受信信号をサンプリングした受信データ系列の中から、所定の距離範囲内の受信データを抽出し、当該抽出された受信データに基づいて、当該距離範囲が「陸/物標区間」であるか「雨雪/ノイズ区間」であるかを判定する。このレーダ装置は、受信データに含まれる雨雪反射を、雨雪反射除去閾値に基づいて抑圧するように構成される。内部データ根拠閾値算出部14は、「雨雪/ノイズ区間」であると判定された距離範囲についてのみ、当該距離範囲内の受信データに基づいて、当該距離範囲に対する雨雪反射除去閾値としての内部データ根拠閾値を求める。
(もっと読む)
レーダ装置
【課題】陸や物標からのエコーを残し、雨雪反射のみを良好に抑圧することができるレーダ装置を提供する。
【解決手段】レーダ装置は、自動利得制御部10を備えている。自動利得制御部10は、データ抽出部11と、閾値算出部12と、利得制御部13と、を備えている。データ抽出部11は、受信信号をサンプリングした受信データ系列の中から、信号レベルが距離方向でランダムに変動する受信データを、陸及び物標からのエコーを含まない受信データである雨雪/ノイズデータとして抽出する。閾値算出部12は、前記雨雪/ノイズデータに基づいて、雨雪反射及び受信機雑音を除去するための雨雪反射等除去閾値を算出する。利得制御部13は、前記受信データの信号レベルと、雨雪反射等除去閾値と、を比較し、信号レベルが雨雪反射等除去閾値以上の受信データのみを選択して出力する。
(もっと読む)
レーダ装置
【課題】衝突危険度の高い物標を確実かつリアルタイムに把握することができるレーダ装置を提供する。
【解決手段】レーダ装置は、レーダアンテナ1と、表示器8と、速度推定部22と、データ発生部6と、を備える。レーダアンテナ1は、水平面内で回転しながらパルス状の信号の送受信を繰り返す。表示器8は、自装置周囲の物標の位置を示すレーダ映像を表示する。速度推定部22は、自装置からの電波の放射方向成分における自装置と物標との相対速度を推定する。データ発生部6は、速度推定部22が推定した前記物標の相対速度に基づいて当該物標の危険度を求める。また、速度推定部22は、レーダアンテナ1が今回受信したエコーと、当該レーダアンテナ1が直前に受信したエコーと、の間の位相変化に基づいて前記相対速度を検出する。そして、表示器8は、前記レーダ映像を表示する際に、危険度が高い物標と低い物標とで表示方法を異ならせることが可能である。
(もっと読む)
探知装置
【課題】物標の捕捉データに基づき、CFAR等の信号処理とは独立して、受信信号の信号処理強度を自動的に調整することにより、捕捉している物標を常に最適な振幅レベルで表示装置に表示させて、ユーザにとり、見やすい画面表示にする。
【解決手段】探知装置10は、信号処理部14で受信信号に対する信号処理を自動的に行う場合に、フィードバックデータ抽出処理部21からフィードバックされた、物標の捕捉状態を示す捕捉データを用いて信号処理の強度を自動的に調整する。
(もっと読む)
61 - 80 / 192
[ Back to top ]