
Fターム[5J070AH35]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | フーリエ変換を行なうもの(DFT、FFT、IFFT) (880)
Fターム[5J070AH35]に分類される特許
481 - 500 / 880
距離測定方法、距離測定装置、非接触IC媒体、距離測定システム、および距離測定プログラム
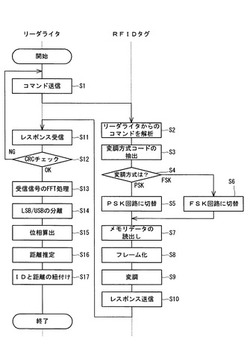
【課題】非接触IC媒体が移動していても、高精度な距離測定を実行できる距離測定方法、距離測定装置、非接触IC媒体、距離測定システム、距離測定プログラム、および距離測定用応答プログラムを提供する。
【解決手段】リーダ装置から非接触IC媒体へ向けて第1周波数により問合せ信号を送信し、前記非接触IC媒体に前記第1周波数を第2周波数により変調させて変調後の周波数により応答信号を送信させ、前記リーダ装置が前記応答信号を受信して複数の周波数成分を取得し、取得した各周波数成分を用いて少なくとも2つの周波数成分の信号の間の位相差を算出し,該位相差を用いて前記リーダ装置から前記非接触IC媒体までの距離を測定する構成とした。
(もっと読む)
レーダ装置及びターゲットの方位角計測方法

【課題】レーダの検出視野内に相対速度が同一となる複数の物体が存在する場合でも、ターゲットの位置を精度良く求めることが可能なレーダ装置を提供する。
【解決手段】同じアンテナが僅かに異なる場所(T1)に位置していたときの過去のデータと、現在(T1+ΔT)の位置におけるデータとを単位のデータセットとして使用し受信信号の強度変化を求めることで、仮想的にアンテナ数をレーダの移動方向に沿って増やすのと類似の効果を得る信号処理を用いる。
(もっと読む)
レーダ信号処理装置および方法
【目的】
レーダ受信信号における干渉信号および、ビート信号における不連続点を除去する、周波数変調(FM−CW)レーダ用の信号処理方法を提供する。また干渉除去後に、その後の信号処理に影響を与えないような補間方法を提案する。
【構成】
ビート信号の各標本化時刻における標本値が干渉信号であるか正規の受信信号であるかを判定する干渉判定部と、前記干渉判定部によって前記標本値が干渉信号であると判定された場合に該干渉信号を標本化されたビート信号を用いることによって正しい値に補間するビート信号補間部からなる干渉除去部を有するレーダ信号処理装置。
(もっと読む)
レーダ装置、レーダ制御装置およびレーダ装置の制御方法
【課題】検出精度が高くかつ検出時間の短縮が可能なレーダ装置、レーダ制御装置およびレーダ装置の制御方法を提供すること。
【解決手段】本発明は、レーダ波を受信する複数のアンテナ22と、複数のアンテナ22毎に得られたビート信号を用い、複数の検出角度における対象物を検出する検出手段14と、検出手段14が検出した対象物から演算用対象物を選択し、演算用対象物の位置情報に基づき、検出手段14が次に対象物を検出する複数の検出角度のうちの一部の検出角度の間隔を他の検出角度の間隔と異なるように変更する演算手段16と、を具備するレーダ装置、レーダ制御装置およびレーダ装置の制御方法である。
(もっと読む)
電子走査式レーダ装置
【課題】電子走査型レーダにおいて簡易な構成で干渉抑圧が可能な、電子走査式レーダ装置の提供
【解決手段】サンプリングされたビート信号RDを、各アンテナ素子について時間方向に複数の短時間データSDに切り出す。短時間データSDの周波数スペクトルから、干渉波の干渉成分周波数を検出する。検出された干渉成分周波数における周波数スペクトル成分に基づいて、干渉成分の位相補正テーブルを生成する。位相補正テーブルに基づいて各チャンネルの受信データの干渉成分の位相を揃える。位相が揃った各チャンネルの受信データから、その直流成分を除去して干渉方向成分を抑圧する。干渉方向成分が除去された各チャンネルの受信データの位相を元に戻す。
(もっと読む)
レーダ装置およびアクティブターゲット装置
【課題】レーダ波を送信して目標物からの折り返し信号を受信し、各目標物との詳細な距離/速度を検出するとともに、目標物における無駄な電力消費を削減する。
【解決手段】制御部101は、無線通信機能の動作時に、目標物のアクティブターゲット装置を指定する局ID情報を含むパケットデータPDを出力し、変調回路105は、そのデータを発振器104からのレーダ波に乗せて送信する。アクティブターゲット装置は、自局の局ID情報を受信した場合に折り返し送信を起動し、ミキサ108は、レーダ機能の動作時に、送信レーダ波の一部と折り返し送信されたレーダ波を混合することにより、ビート信号を検出する。
(もっと読む)
パッシブレーダ装置
【課題】利用可能な直接波と反射波の組が1つであっても、反射位置が容易に推定できるパッシブレーダ装置を得る。
【解決手段】送信機から送信される信号を受信する信号受信部101、信号受信部101で受信した信号を用い、送信機から直接到達する直接波と反射物により反射されて到達する反射波との伝搬遅延時間差および直接波と反射波との位相差の算出を行うと共に、送信機および信号受信部の位置を取得する測位演算部102、送信機から平面波が送信され、かつ反射波が平面で反射されていると仮定した場合の幾何学的な制約条件に基づき、測位演算部102で算出した上記伝搬遅延時間差より得られる経路差と、測位演算部102で算出した上記位相差より得られる位相差の変化率とを用いて、反射波の反射位置を推定する反射位置推定部103、並びに推定した反射位置を表示する表示部104により、パッシブレーダ装置100を構成する。
(もっと読む)
測定装置および方法
【課題】確実に対象物を検知する。
【解決手段】2周波CWレーダ1は、高速測定モードの測定処理を実行することで、高速測定結果Shを出力し、低速測定モードの測定処理を実行することで、低速測定結果Slを出力する。処理演算装置2は、2周波CWレーダ1からの高速測定結果Shを用いて所定の処理を実行し、受信信号の干渉が発生したと判断したとき、高速測定結果Shの代わりに、低速測定結果Slを参照して、所定の処理を続行することで、確実に測定対象物3を検知することができるようになる。本発明は、プリクラッシュシステム等の高応答システムに適用可能である。
(もっと読む)
レーダ装置
【課題】レンジ・グレーティングローブが発生する場合であっても高い距離分解能を得ることができるレーダ装置。
【解決手段】チャープ信号のパルスの周波数がステップ状に変化する送信信号を生成するステップ&チャープ信号生成器1と、送信信号を送信して得られた反射波を受信して受信信号を生成する受信器5と、Σ信号およびΔ信号のパルス圧縮用のウェイトを発生するパルス圧縮ウェイト制御器10と、受信信号に対してウェイトを用いてパルス圧縮を行ってΣ信号およびΔ信号を生成するパルス圧縮器6と、パルス圧縮により得られたΣ信号およびΔ信号の各々について、ステップ周波数による合成を行うステップ周波数合成器7と、合成により得られたΣ信号とΔ信号の絶対値のレベルを比較する比較器8と、この比較により、Σ信号のレベルがΔ信号のレベルより大きい場合の信号を用いて目標距離を検出する検出器9を備える。
(もっと読む)
測定装置および方法
【課題】より少ない演算量で対象物に関係する情報を演算する。
【解決手段】2周波CWレーダ1は、自車の後方あるいは側方にある対象物を認識し(S11)、認識された対象物群を、自車に接近する対象物と、自車から離反する対象物とに判別し(S12)、接近離反の判別結果に基づいて、認識された対象物群の中から、自車に接近すると判別された対象物のみを抽出し(S13)、抽出された対象物との距離Lまたは相対速度vの少なくとも一方を算出し(S14)、測定結果sを出力する(S15)ことで、より少ない演算量で対象物に関係する情報を演算できる。本発明は、対象物を測定する測定装置に適用できる。
(もっと読む)
レーダ装置、及び物標検出方法
【課題】レーダ波の周波数変調を行わないスキャンのときに物標の速度が急変したとしても、次回のスキャンで実際に検出される物標の距離が乖離しないような距離の予測を行う。
【解決手段】過去の検出物標の距離と速度とに基づき現在の距離を予測する物標距離予測手段と、予測された距離に対応する物標が検出されないときは、予測された距離に対応する物標が検出された回数をカウントし、前記カウントの値が規定数に達したときに、前記検出された物標の距離を出力する連続性判定手段と、周波数変調を施さない第2のレーダ波を送受信した場合には、予測された距離と、そのスキャンで検出された速度とに対応する物標が検出されたものと推定する物標推定手段を有するレーダ装置により、次回のスキャンで検出される距離と乖離しない距離を予測することが可能となる。
(もっと読む)
物体検出装置
【課題】検出信号のピーク値を的確に検出して適切な物体検出が行える物体検出装置を提供すること。
【解決手段】電波を送信し物体で反射した受信波を送信波とミキシングして検出信号を出力し、その検出信号において物体に対応したピーク値を検出する際に、ピーク値の検出予測位置に所定範囲の探索領域を設定し(S10)、その探索領域においてピーク値を検出し(S12)、その探索領域にピーク値を検出できない場合に検出信号の信号値の増加する側に探索領域をシフトさせてピーク値の検出を行う(S12〜S16)。これにより、探索領域を大きくすることなく広い範囲でピーク検出が可能となり、確実なピーク検出が行え、物体の検出精度の向上が図れる。
(もっと読む)
目標検出装置
【課題】高速移動する小目標を確実に検出できるとともに、処理規模を小さくして目標検出を高速化できる目標検出装置。
【解決手段】受信信号をレンジセル毎にPRI方向にコヒーレント積分またはノンコヒーレント積分する積分回路1と、積分回路で得られた積分値の最大値からP番目(Pは正の整数)までの極大値となるレンジセルを抽出するレンジセル極大値抽出回路2と、レンジセル最大値抽出回路で抽出されたP個のレンジセルの各々について、その回りのK個のレンジセルからM通り(Mは正の整数)の積分系列を抽出する積分系列抽出回路3と、積分系列抽出回路で抽出されたM通りの積分系列の各々についてコヒーレント積分するコヒーレント積分回路5と、コヒーレント積分回路で得られた積分値の最大値を抽出する最大値抽出回路6と、最大値抽出回路で抽出された最大値に基づき目標を検出する検出回路8を備える。
(もっと読む)
便器洗浄装置
【課題】ドップラーセンサを用いた便器洗浄装置において、外乱による便器洗浄バルブの誤作動を少なくし、特定動体に応じた便器洗浄バルブの制御精度の低下も回避する。
【解決手段】便器洗浄装置は、ドップラーセンサ2と、ドップラーセンサ2からのドップラー信号における第1の周波数帯域Bのレベルが第1のレベルTBであることにより特定動体10を判別し、該判別に応じて便器洗浄バルブ50を制御する制御手段3とを有する。制御手段は、ドップラー信号が第1の周波数帯域より低い第2の周波数帯域Aの成分を含み、かつ第1の周波数帯域における一部の周波数部分B1のレベルが第1のレベルである場合は、第1の周波数帯域における該一部の周波数部分を除く他の周波数部分B2を第1の周波数帯域に再設定し、再設定された第1の周波数帯域のレベルが第1のレベルであることにより特定動体を判別する。
(もっと読む)
レーダ装置、及びその物標検出方法
【課題】ビート信号のピークの極大値が中心からずれて形成された場合であっても、物標の中心の方位角を精度良く検出する。
【解決手段】所定の角度範囲に送信信号を送信し、前記角度範囲を分割した方位角ごとに、物標により反射される送信信号を受信信号として受信するレーダ装置は、第1の方位角群で受信された第1の受信信号から、前記第1の方位角群における第1のピーク群を検出し、前記第1の方位角群とは異なる複数の方位角を有する第2の方位角群で受信された前記第1の受信信号と異なる周波数の第2の受信信号から、前記第2の方位角群における第2のピーク群を検出し、前記第1、第2のピーク群を合成して合成ピーク群を求め、前記合成ピーク群の中心の方位角を前記物標の中心の方位角として検出する。よって、物標の中心の方位角を精度良く検出できる。
(もっと読む)
吐水装置
【課題】確実に止水をすることができる吐水装置を提供する。
【解決手段】吐水部と、放射した電波の反射波によって被検知体に関する情報を取得するセンサ部と、前記センサ部からの検知信号に基づいて前記吐水部からの吐水を制御する制御部と、記憶手段と、を備え、前記センサ部から放射される電波の少なくとも一部は、前記吐水部から吐水される吐水流により反射され、前記制御部は、前記吐水部から吐水しているだけの時の水流状態から得られた信号に基づき決定され前記記憶手段に格納された閾値と、前記センサ部からの検知信号の値と、を比較して前記吐水部からの吐止水を制御することを特徴とする吐水装置が提供される。
(もっと読む)
パラメトリック時間領域手法を用いた地上反射波軽減
手法及びシステムは、レーダを用いた注目領域の調査のために開示される。レーダ信号は注目領域へ伝播される。注目領域に散乱された、サンプリングされた時間領域レーダデータは収集される。尤度関数は、定義されたパラメータセットに対する、注目領域のパラメトリックモデルのサンプリングされた時間領域データを用いて計算される。パラメータセットは尤度関数の極値を見つけるために変更される。 (もっと読む)
表層流速推定方法、装置並びにプログラム
【課題】海洋レーダによって得られるデータを用いた沿岸表層流動の観測において、外因性ノイズの影響を排除してドップラースペクトルの正当なピーク周波数を短時間で検出することができるようにする。
【解決手段】ドップラースペクトルの正の領域のスペクトルから正の領域のスペクトルの周波数方向の平均値を引いて算出される偏差について部分領域の平均値を算出すると共にドップラースペクトルの負の領域のスペクトルから負の領域のスペクトルの周波数方向の平均値を引いて算出される偏差について部分領域の平均値を算出し、部分領域毎の正の領域のスペクトルの偏差の部分領域の平均値と負の領域のスペクトルの偏差の部分領域の平均値との合算値が最大である部分領域と連接し且つ部分領域毎の合算値が所定の閾値よりも大きい部分領域からなる連接領域の中からピーク周波数を検出するようにした。
(もっと読む)
クラッタ判別方法およびレーダ装置
【課題】固定目標、ウェザークラッタ及びシークラッタの判別精度を高めて、固定目標、ウェザークラッタ及びシークラッタを移動目標と誤認する頻度を極小化可能にする。
【解決手段】レーダ装置の探知覆域内を複数の領域(セル)に分割するとともに、当該レーダ装置で受信されMTI及びMTDドップラフィルタ処理後に検出された目標に対して、前記セル単位でレーダスキャン毎の相関判定を実施し、相関判定結果を前記セル単位で累積記憶し、同一又は周辺セルとの相関の連続性が、予め設定したクラッタ判別条件と一致する目標をクラッタと判別する。
(もっと読む)
レーダ装置
【課題】小型のアンテナであっても、目標の検出性能および測角精度を向上させることができるレーダ装置を提供する。
【解決手段】一定の開口を有する空中線3と、空中線から所定時間間隔で送信したパルス信号の反射波を受信し、目標に対する自己の相対速度と所定時間間隔とに基づき決定される受信位置毎に受信データを生成する受信手段41と、受信手段からの受信データをレンジセル毎にフーリエ変換し、該フーリエ変換により得られた信号のピーク値から目標を検出し、該ピーク値に対応するドップラ周波数と受信位置とに基づき目標方向を測角するSAR検出/測角処理部53を備えている。
(もっと読む)
481 - 500 / 880
[ Back to top ]