
Fターム[5J070AH35]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | フーリエ変換を行なうもの(DFT、FFT、IFFT) (880)
Fターム[5J070AH35]に分類される特許
441 - 460 / 880
電波発射源可視化装置及びその方法
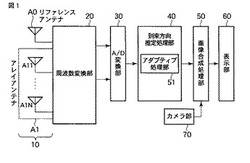
【課題】マルチパス環境下における精度の劣化を防ぐことの可能な電波発射源可視化装置及びその方法を提供すること。
【解決手段】電波発射源可視化装置において電波の到来方向を推定するにあたり、遅延タップ付のアダプティブアレイアルゴリズムを用いて遅延波を打ち消すような複素ウェイトを算出する。ビーム形成に際してこの複素ウェイトを用いれば遅延波の到来方向にヌルを向けるようなビームを形成することができる。さらに、複数ウェイトの値がマルチパス遅延波の到来方向に対応することにも着眼し、このことを用いて、遅延波の到来方向にヌルを向けるようなビームを2次元平面上に可視化する。この可視化像とカメラなどで取得した背景画像を重ね合わせることにより、マルチパス環境においても電波発射源の位置特定を可能とする。
(もっと読む)
アンテナ測定装置

【課題】 従来、回転台を測定角度ごとに停止させ、スペクトラムアナライザで利得を測定し、これを規定角度範囲の全角度で実施することでアンテナパターンを測定していた。このため、各測定角度で回転台を停止されるので、パターン測定に膨大な時間を要していた。
【解決手段】 供試体を測定角度範囲に亘って一定の速度で連続回転させ、その間A/Dボードにてビデオ信号データを連続で取得し、その後、取得データから回転速度から算出した各測定角度相当分のA/D変換データのみを抜き出して、FFT演算処理を行うことで、各角度でのアンテナ利得を算出し、アンテナパターンを計測する。
(もっと読む)
レーダー装置、レーダー装置の制御方法
【課題】レーダー装置においてフリッカ雑音の影響を効果的に除去すること。
【解決手段】このレーダー装置は、周波数を所定の変化率で周期的に増減させた送信信号を送信する送信部と、送信部が送信した送信信号が探知対象に反射して戻る受信信号および送信信号を乗算してビート信号を生成するミキサと、ビート信号を演算して探知対象までの距離データを生成する演算部と、ビート信号の周波数を検出する周波数検出部と、周波数検出部により検出されたビート信号の周波数が、ミキサに起因するフリッカ雑音のカットオフ周波数以上となるように、送信信号の周波数の変化率を制御する制御部とを具備する。
(もっと読む)
レーダ装置、及び方位角検出方法
【課題】異なる周期で動作する画像認識装置からの検出位置を用いて、レーダ装置により物標の方位角を精度良く検出する。
【解決手段】レーダ装置に、前記探索領域の撮影画像に基づいて第1の周期ごとに前記物標の位置を検出する画像認識装置から、当該検出された検出位置が入力される入力手段と、複数の前記入力された検出位置に基づいて、前記第1の周期より短い第2の周期ごとに前記物標の方位角を推定する方位角推定手段と、前記探索領域のうち、前記推定された推定方位角付近では第1の方位角刻み、それ以外の範囲では前記第1の方位角刻みより大きい第2の方位角刻みで前記物標の方位角を検出する方位角検出手段とを備えることで、物標の方位角を精度良く検出できる。
(もっと読む)
電磁波及び/又は弾性波にさらされたオブジェクトの三次元合成再構成の方法
電磁波及び/又は弾性波にさらされたオブジェクトを、感知信号(特にノイズの多い弱信号)に基づく有用な三次元情報の識別によって、合成的に再構成する方法である。この方法は、判定基準(2)、(3)、(4)、(6)、(7)、及びグリッド(5)を、知識ベース(1)から抽出するステップ(A11)、(A12)、(A2)、(A31)、(A32)、(A4)と、判定基準(2)によってフィルタリングされた感知信号(8)から、弱信号(9)を抽出するステップ(B1)と、判定基準(3)によってフィルタリングされた弱信号(9)から、問題の弱信号(10)を抽出するステップ(B2)と、問題の弱信号(10)からノイズを除去して増幅し(B3)、有用な弱信号(11)を取得するステップと、判定基準(4)によってフィルタリングされた有用な弱信号(11)から、有用な直接情報(12)を識別し(C)、最適な判定基準(2’)及び(3’)を与えるステップと、グリッド(5)によってフィルタリングされた有用な直接情報(12)を使用して、問題の情報(13)を再構成し(D1)、最適なグリッド(5’)を与えるステップと、判定基準(6)によってフィルタリングされた問題の情報(13)を使用して、有用な情報(14)を再構成し(D2)、最適な判定基準(6’)を与えるステップと、判定基準(7)によってフィルタリングされた有用な情報(14)に基づいて、オブジェクトに関する三次元情報(15)を再構成し、認識状態ファイル(16)を与え、最適な判定基準(7’)を与えるステップと、知識ベース(1)において、判定基準(2)、(3)、(6)、(7)、及びグリッド(5)を、最適な判定基準(2’)、(3’)、(6’)、(7’)、及び最適なグリッド(5’)で更新する(E1)、(E2)、(E31)、(E32)、(E4)か、又は判定基準(2)、(3)、(6)、(7)、及びグリッド(5)を変更するステップと、を含む。この方法は、工業、医療、保安、及び防衛におけるリスク管理及びパフォーマンス管理用に問題のオブジェクトを識別する目的で設計されたものである。 (もっと読む)
物体認識装置及びレーダ装置
【課題】レーダ装置外部から電磁波が作用することに起因するノイズがレーダ信号等に混入した場合に、物体の誤認識を防止する。
【解決手段】所定角度範囲に対し送信されたレーダ信号と物体により反射された前記レーダ信号との周波数差信号に基づき前記物体を認識する物体認識装置は、単位角ごとに前記周波数差信号のレベルのピークを検出するピーク検出処理と、複数の前記ピークから相互に所定の周波数範囲内にあるピーク群を検出し、前記ピーク群のうちピークのレベルが極大値を形成するピーク群を前記物体として認識する物体認識処理とを行い、前記物体認識処理では、前記ピーク群に含まれるピークの数が基準ピーク数以下であり、且つ当該ピークのレベルが基準レベル以上であるという条件が満たされ、当該ピークがノイズによる蓋然性が大きいときには、当該ピーク群を前記物体として認識しないので、誤認識を防止できる。
(もっと読む)
レーダ装置、及び、車両制御システム
【課題】方位ばらつきが大きい場合であっても、コストの増大を招くことなく、物標の方位を精度良く算出できるレーダ装置を提供する。
【解決手段】互いに間隔が異なる三本以上の素子アンテナ15のうち、任意の二本の素子アンテナ対で受信された反射波の位相差から物標の方位候補を複数求める処理を各素子アンテナ対に対して行なう方位候補演算部と、前記方位候補演算部で算出された単一または複数の方位候補に対応するデジタル・ビーム・フォーミング演算を行なうDBF演算部と、前記DBF演算部で算出されたDBF値に基づいて前記物標の方位を確定して出力する方位演算部として機能するCPU11を備えているレーダ装置10。
(もっと読む)
振動検出素子、振動測定装置並びに振動測定方法
【課題】レーザー光を反射する特性を有していない物体に対しても反射シールは貼ることなしに非接触で振動の検出が可能で、かつ、受信電波から十分な信号を取り出すことができる振動検出素子、前記振動検出素子を好適に用いることのできる振動測定装置並びに振動測定方法を提供する。
【解決手段】電波発信手段2によって測定対象の物体に電波を発信する。発信電波と反射電波とを、電波反射手段3の内部、かつ電波発信手段2の近傍に配置されたアンテナ4で受信し、アンテナ4で受信された発信電波と反射電波との位相に関する情報含む信号をトランジスター5で検波する。
(もっと読む)
距離測定方法及び距離測定装置
【課題】構造簡単な装置で、遠距離範囲と近距離範囲との同時の高精度の距離測定を可能とする。
【解決手段】レーダにより対象物までの距離を測定する距離測定方法において、パルスにより、周波数を連続的変化させるFMCW信号を搬送波として振幅変調した信号とFMCW信号を重畳して電波として放射し、対象物からの反射波を受信して、受信時のFMCW信号を搬送波にして、この受信信号を復調し、復調して得られた信号からFMCW信号のビート周波数帯域の信号を抽出し、抽出された信号から第1距離を測定し、復調して得られたパルス信号から第2距離を測定する。
(もっと読む)
レーダ装置
【課題】物標が存在する可能性が高い場合に、物標が存在すると判定するタイミングを早めることができるレーダ装置の提供。
【解決手段】レーダ波を送信する送信部と、物標で反射されたレーダ波の反射波を受信して受信信号を発生する受信部と、受信信号と送信信号からビート信号を生成するビート信号生成部と、ビート信号のピーク周波数を抽出しビート信号のピーク周波数におけるピーク強度を求める周波数解析部と、ピーク周波数およびピーク強度に基づき、物標の存在確率を測定サイクル毎に求める存在確率算出部と、算出された存在確率が所定値に達したとき、物標が存在すると判定する存在判定部とを備え、存在確率算出部は、ビート信号のピーク強度が第1の閾値以上第2の閾値未満(第1の閾値<第2の閾値)であるとき存在確率を第1の値で増加させ、ビート信号のピーク強度が第2の閾値以上であるとき存在確率を第2の値(第1の値<第2の値)で増加させる。
(もっと読む)
探知測距装置および探知測距方法
【課題】探知測距装置において、角度推定の前段に行われる目標数推定の計算負荷を軽減し、且つ、推定精度を向上させる。
【解決手段】擬似空間平均共分散行列生成部104b−6は、Rf1、Rf2、Rb1、Rb2から、適切な行列を一つ選択するか、適切な行列を2つ以上選択して組み合わせて、擬似空間平均共分散行列Rを生成する。擬似空間平均共分散行列エルミート共役積生成部104c−1は、目標数推定用行列RRHを生成する。目標数推定用行列分解部104c−2は、RRHにLU分解を施して下三角行列Lと、上三角行列Uとに分解する。指標生成部104d−1は、この上三角行列Uの要素を用いた指標を生成する。指標パラメータ走査処理部104d−2は、指標生成部104d−1によって生成された指標を用いて目標数mを推定する。
(もっと読む)
暴風雨を動的及び適応的に追跡するレーダ
大気条件を予測する方法及びシステムが発明の実施形態にかかり開示される。1つの実施形態では、方法は大気により反射されたデータを受信する工程と、大気により反射されたデータを用いて、動き係数を求める運動方程式を解く工程と、を含む。さらに、動き係数及び大気により反射されたデータを用いて、今後の大気条件が予測される。発明の他の実施形態では、運動方程式は周波数領域で解かれる。様々な線形回帰手段が、係数を解くために用いられ得る。システムの他の実施形態では、レーダシステムは、スペクトル運動方程式を解くことにより今後の大気条件を予測することが開示される。 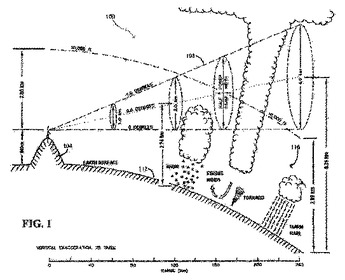 (もっと読む)
(もっと読む)
測距通信装置
【課題】呼出機1と応答機2間を伝播する電波の伝播時間から呼出機1と応答機2間の距離を計測する測距通信装置において、無線回路の制御クロックの周期未満の精度で伝播時間を計測し高精度な距離測定を可能にする。
【解決手段】呼出機1と応答機2間を伝播する電波の伝播時間から呼出機1と応答機2間の距離を計測する測距通信装置において、応答機2は呼出機1からの呼出信号から距離測定に必要な符号信号を制御クロックの周期未満の精度で検出し再生して返信することで高精度に距離測定を行う。
(もっと読む)
電波探知装置および方法
【課題】高分解A/D変換回路を用いることなく、精度を高めたモノパルス式レーダを具現化できるようにする。
【解決手段】例えば、モノパルス式レーダ21の差信号△の系統と和信号Σの系統のそれぞれにおいて個別に、A/D変換部46△,46Σの各前段に、可変利得部45△,45Σがそれぞれ設けられている。演算処理部47は、この可変利得部45△,45Σのゲイン切替の制御を行う。本発明は、モノパルス式レーダに適用可能である。
(もっと読む)
マルチスタティックレーダ装置
【課題】送信側のレーダ装置と受信側のレーダ装置と距離が未知の場合であっても直接波の影響を排除できるマルチスタティックレーダ装置を提供する。
【解決手段】送信側のレーダ装置から送信された電波を受信側のレーダ装置で受信して目標を検出するマルチスタティックレーダ装置において、受信側のレーダ装置は、送信側のレーダ装置から送信された電波を受信する主アンテナ1と、送信側のレーダ装置から送信された電波を受信する補助アンテナ11aと、主アンテナからの信号に基づき生成された主チャンネル信号の振幅と補助アンテナまたは主チャンネルからの信号に基づき生成された補助チャンネル信号の振幅とを比較する振幅比較器6と、振幅比較器により主チャンネル信号の振幅が補助チャンネル信号の振幅より大きい場合に、該主チャンネル信号に基づき目標の検出および測角を行う検出/測角器5を備えている。
(もっと読む)
移動体の速度測定装置及び速度測定方法
【課題】本発明の目的は、ノイズ波の干渉を防止するとともに、車両の上下動や走行路面の凹凸により速度の計測に誤差が生じるのを防止することが可能な移動体の速度測定装置を提供することである。
【解決手段】移動体2の底面2aに設けられ、移動体2の走行方向Xに対して傾斜した送信波3を走行路面20に向けて放射するとともに走行路面20から反射した反射波5を受信するように構成された送受信器8と、送信波3と反射波5との間の周波数偏移量△fから移動体2の速度Vを計算する速度計算手段7とを備えている移動体2の速度測定装置1において、送受信器8は、円偏波を送受信するように構成され、送受信器8は、所定の旋回方向の円偏波を放射し、旋回方向と反対方向の円偏波のみを受信するように構成されている。
(もっと読む)
汚れ判定装置
【課題】レーダセンサのレーダ波受信面の汚れを精度良く判定する汚れ判定装置を提供する。
【解決手段】監視対象周波数領域から抽出した監視対象ピークの電力値を、変調区間毎かつ受信チャンネル毎に算出し、変調区間毎に、電力値が最大となる最大チャンネルに対する各受信チャンネルの電力値の偏差(チャンネル偏差)を算出する(S210〜S250)。算出したチャンネル偏差に従って、各受信チャンネルに対応付けられた前判定値CPをカウントすると共に、車速Vが下限車速Vth以上、かつ受信チャンネルの中に前判定値CPが前判定閾値CPth以上のものが存在する場合に、車速Vに応じて算出される更新値Kにより汚れ判定値CDを更新し、その汚れ判定値CDが汚れ判定閾値CDth以上であれば、レーダ波の受信面に汚れが生じていることを表すダイアグ情報をONにする(S260〜S320)。
(もっと読む)
レーダ装置
【課題】安定した目標追尾又は目標分離を行うため、目標の追尾状態に応じて適切なモードの動作を行えるように、所要とされる速度、距離又は角度分解能の目標情報を自動で出力することができるレーダ装置を得る。
【解決手段】データ設定部2Aにおいて、センサ制御部1Aからの動作モード、モードパラメータ及び速度分解能に基づき、速度分解能を満足するFFT数を算出し、目標検出部6へFFT数を含む信号処理パラメータを出力するとともに、目標検出部6において、データ設定部2AからのFFT数を含む信号処理パラメータに基づいた信号処理を行い、目標を検出する。
(もっと読む)
レーダー装置
【課題】低い演算負荷で測定範囲の対象物との相対速度や相対距離などを測定することができるレーダー装置を提供する。
【解決手段】測定範囲内に存在する対象物で反射した反射波のレベルを予め定めた閾値と比較する。そして、予め定めた閾値以上となる反射波のみに基づいて対象物との相対距離として測定し、当該反射波をフーリエ変換処理することによってドップラー周波数を算出し、算出したドップラー周波数に基づいて対象物との相対速度を算出する。
(もっと読む)
レーダー装置
【課題】車両に搭載されるレーダー装置に必要とされる性能を満たしながら、短時間で測定を完了することができるレーダー装置を提供する。
【解決手段】制御処理部は、第1の測定方式による測定を開始し、対象物が測定範囲内に存在するとき、対象物との相対位置及び相対速度を測定する。そして、制御処理部は、第1の測定方式によって測定した対象物の相対位置に基づいて再測定範囲を決定する。制御処理部は、再測定範囲を決定すると、再測定範囲のみを第1の測定方式よりも分解能の高い第2の測定方式で測定する。
(もっと読む)
441 - 460 / 880
[ Back to top ]