
Fターム[5J070AH35]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | フーリエ変換を行なうもの(DFT、FFT、IFFT) (880)
Fターム[5J070AH35]に分類される特許
381 - 400 / 880
誘導装置
【課題】 従来の合成帯域処理を行う誘導装置においては、相対距離を計測することはできるが相対速度を計測することが困難であり、相対距離の変化率で算出しても時間の変動があるため、精度が低かった。
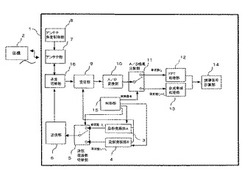
【解決手段】 従来の合成帯域処理では周波数をf1〜fnに変化させ、相対速度のみを計測していたが、送信パルスの前半部分をf0、後半部分をf1〜fnとし、1つの受信波に対してA/Dサンプリングを2回実施する。その結果、f0のA/D結果に対してFFT処理することでドップラ周波数(相対速度)を算出し、f1〜fnのA/D結果に対して合成帯域処理することで相対距離を算出する。これにより、相対速度と相対距離を同時に計測することができるため、追尾・誘導精度が向上する。
(もっと読む)
パルスレーダ装置

【課題】目標数が多数の場合であっても、少ない数のPRIを用いて目標までの相対距離を求めることのできるパルスレーダ装置を得る。
【解決手段】PRI設定器1、複数のPRIごとにパルス列Bを目標Aの方向に送信し、反射信号Cを受信してレンジビンごとの受信ビデオ信号を生成する送受信部100と、複数のPRIごとに、複数の受信ビデオ信号を同じレンジビンごとにフーリエ変換して、複数の距離速度マップを生成する複数距離速度マップ生成器17と、複数のPRIごとに生成された複数の距離速度マップごとに目標を検出する目標検出器18と、異なるPRIに対する距離速度マップで検出された複数の目標の間の同一性を、複数の目標の速度情報を用いて判定する同一目標判定器19と、同一目標に対するPRIごとに生成された距離速度マップのレンジビン情報とPRI情報とを用いて、同一目標の相対距離を求める測距器20とを備えている。
(もっと読む)
レーダ装置
【課題】低速走行時に走査角度範囲を広角化しても、車載用レーダ装置の冷却効率の低下を防止する。
【解決手段】車両レーダ装置において、所定の走査角度範囲で単位角度ごとにレーダ信号を送受信するレーダ送受信機と、前記車両の走行速度が第1の速度のときには、第1の走査角度範囲内で第1の単位角度ごとに送受信されたレーダ信号に基づいて目標物体を検出し、前記走行速度が前記第1の速度より遅い第2の速度のときには、前記第1の走査角度範囲より広い第2の走査角度範囲内で前記第1の単位角度より広い第2の単位角度ごとに送受信されたレーダ信号に基づいて目標物体を検出する目標物体検出手段とを備えることにより、低速走行時に広角を走査しても信号処理量を低減できるので、信号処理装置の温度上昇を防止できる。
(もっと読む)
信号処理装置、レーダ装置、及び信号処理方法
【課題】 車両制御上重要な目標物体を示すピーク信号を高い確度で優先的に抽出する。
【解決手段】 周波数変調が施された送信信号の反射信号を受信して前記送信信号と受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置は、前記ビート信号の周波数スペクトルにおけるピーク信号に基づき目標物体の方位角を検出する方位角検出手段と、所定の方位角範囲及び所定の相対距離範囲に対応するピーク信号を優先的に抽出するピーク信号抽出手段と、前記抽出されたピーク信号から前記目標物体を検出する目標物体検出手段とを有するので、車両制御上重要度の高い方位角範囲及び相対距離範囲にある目標物体を示すピーク信号をもれなく検出できる。
(もっと読む)
レーダ装置及び物標検出方法
【課題】静止物のピーク信号の裾野に埋もれてしまう物標に対応するピーク信号を検出することを可能とするレーダ装置及び物標検出方法を提供することを目的とする。
【解決手段】送信波と受信波を利用して第1のビートにおける複数の第1ピーク信号及び第2のビートにおける複数の第2ピーク信号を検出するピーク検出手段(32)と、複数の第2ピーク信号のグループ化を行って第2のビートにおけるグループ信号を得るグループ化手段(33)と、グループ信号に対応するピーク信号を複数の第1ピーク信号の中から検索する検索手段(34)と、グループ信号に対応するピーク信号を複数の第1ピーク信号の中から分離する分離手段(35)を有することを特徴とするレーダ装置(10)。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】複数の目標物体から得られたレベルの異なるビート信号の周波数が近接する場合であっても、それぞれの目標物体を検出する。
【解決手段】周波数変調された送信信号の目標物体による反射信号を受信して前記送信信号と受信信号の周波数差を有するビート信号を生成するレーダ送受信機の信号処理装置のピーク信号検出手段は、前記周波数スペクトルのレベルの周波数方向における変化率に基づき、前記極大値を形成する第1のピーク信号から所定周波数範囲内で極大値を形成しない第2のピーク信号をさらに検出するので、第1のピーク信号とそのサイドローブに埋もれて極大値を形成しない第2のピーク信号のそれぞれに対応する目標物体を検出することができる。
(もっと読む)
物標検出装置
【課題】アンテナ素子数を増加させることなく、静止した複数物標の検出性能を向上させる。
【解決手段】FMCW波の送受信動作を必要なスナップショットの必要数だけ繰り返すと共に、送受信動作毎に、FMCW波の中心周波数を変化させる(S110〜S130)。送受信動作(スナップショットSSi,i=1〜4)毎に、ビート信号データをFFT処理することで周波数スペクトラムを求め、その周波数スペクトラム上でピークとなる対象周波数kのデータx1(k)〜xN(k)を、全受信チャンネルCH1〜CHNから抽出し,配列した受信ベクトルXi(k)を生成し、受信ベクトルXi(k)のそれぞれについて相関行列Rxx_ssi(k)を求める。更に、相関行列Rxx_ssi(k)を、対象周波数k毎に平均(時間平均)した平均相関行列HRxx(k)を算出し、平均相関行列HRxx(k)から求めたMUSICスペクトラムにより、物標が存在する方位を求める(S140〜S180)。
(もっと読む)
速度測定装置
【課題】 小型で、安価で、消費電力が少なく、ヘッドスピードとボールスピードの双方の測定結果を安定的かつ比較的正確に得ることができる速度測定装置を提供すること
【解決手段】 ドップラー信号を出力するドップラーセンサ11と、ドップラーセンサによって出力されたドップラー信号を基準と比較して二値化するコンパレータ12と、コンパレータの出力に基づいてヘッドスピードを算出する第一マイクロコントローラ14と、ドップラー信号に基づきFFTによりボールスピードを求める第二マイクロコントローラ17と、を備える。さらに、第一マイクロコントローラは、ゴルフクラブのスイングの有無を判別する機能を備え、スイングがあったと判別された場合に、ドップラー信号の蓄積を開始し、FFT処理を行うようにした。
(もっと読む)
レーダ装置
【課題】FMCWレーダを初めとするCWレーダ方式を用いるレーダ装置において、干渉波の発生を回避し、制約された周波数変調帯域内に同時に多くのレーダ装置を収容可能とする。
【解決手段】周波数変調を伴う基準連続波に基づく送信波を空間に放射し、外部目標に反射されたこの送信波を受信して受信信号を取得するとともに、取得した受信信号と上記基準連続波からビート信号を求め、求めたビート信号から上記外部目標の距離及び速度を算出するレーダ装置1において、上記基準連続波を上記レーダ装置に特有の間隔でパルス化してパルス送信信号を生成するパルス生成手段13と、上記パルス送信信号を上記送信波として空間に放射するアンテナ16と、干渉波の発生を検出する干渉波モニタ19とを備え、パルス生成手段13は、干渉波モニタ19が検出した干渉波のパルス間隔と異なる間隔を上記特有の間隔に選択する。
(もっと読む)
FM−CWレーダ装置
【課題】FM−CWレーダ装置において、レーダの受信信号に混入したインパルス状の干渉波をビート信号から除去する。
【解決手段】ビート信号を連続する3以上の被調整・注目・被調整スイープデータ列とし、被調整スイープデータ列の振幅と位相を前記注目スイープデータ列の振幅と位相に等しくなるようにそれぞれ調整して調整済スイープデータ列を得、調整済・注目・調整済スイープデータ列の対応するデータの中央値を出力用スイープデータ列とする。
(もっと読む)
信号処理回路
【課題】不要波を送信する目標の距離を追跡する際、不要波の受信を高精度で検出でき、目標距離の追跡を行える信号処理回路を提供する。
【解決手段】反射波を含む電波を受信検波する送受信部と、レンジゲート、進みゲート、遅れゲート、2個の前段追加ゲート及び2個の後段追加ゲートを発生させるゲート発生部2と、これらのゲートを用いて抽出された受信信号を周波数解析して得たゲート情報に基づき目標距離の距離誤差を計算し、ゲート情報を記憶部に記憶する距離誤差計算部18と、前段追加ゲート及び後段追加ゲートの各信号レベルと閾値とを比較して不要波の受信を検出する不要波検出部17と、受信検出後不要波が消失するまでの時間を予測する時間予測部20とを備え、距離誤差計算部18は不要波の受信が検出される以前に計算したゲート情報を用いて距離誤差を計算する。
(もっと読む)
レーダ装置
【課題】従来のビート周波数の対応付け方法では、目標の探知状況がアップチャープ時とダウンチャープ時で異なりビート周波数のピーク数が合わない場合においては、ビート周波数の対応付けが正確に行えない状況が発生する。
【解決手段】FMCW信号を送信する送信手段1と、受信信号と送信信号とからビート信号を生成する受信手段2と、ビート信号のビート周波数分布を求めるビート周波数生成手段3と、ビート周波数の追尾処理を行うアップチャープ用ビート周波数追尾手段4とダウンチャープ用ビート周波数追尾手段5と、ビート周波数時系列データから目標の距離及び距離変化率を算出するアップチャープ用目標検出手段6とダウンチャープ用目標検出手段7とを設けた。
(もっと読む)
プリント配線板及びレーダ装置
【課題】電子部品の実装部分における局所的な反りの発生を防止できるプリント配線板を提供する。
【解決手段】
本件発明のプリント配線板は、プリント配線板の電子部品を表面実装する部分にスリットを有する銅箔ベタを形成することを特徴としている。これによれば、電子部品を表面実装するために加える熱によって生じるプリント配線板の反りを銅箔ベタのスリットが吸収するため、電子部品を実装する部分に生じる局所的な反りの発生を防止できる。
(もっと読む)
偏波レーダ装置
【課題】効率的な偏波レーダ装置を提供する。
【解決手段】垂直送信アンテナ16から送信する垂直偏波または水平送信アンテナ20から送信する水平偏波の中の一方を他方に比べて遅延させる。この遅延を対象物の位置の移動が無視できる範囲内とする。垂直受信アンテナ22、水平受信アンテナ24で受信され乗算器28,30で得られたビート信号が信号処理部34で周波数解析され、遅延情報に基づいてビート信号周波数が異なることを利用して4つの偏波成分が分離して取得される。
(もっと読む)
誘導装置
【課題】 従来の誘導装置は目標に向けて電波を送信して、目標から反射してきた信号を受信することにより目標信号を検出して追尾するが、目標信号以外に妨害機から送信されたECM信号を受信した場合には、ECM信号を目標信号であると誤認識し、目標ではなくECM信号を追尾することがあった。
【解決手段】 水平偏波及び垂直偏波を同時受信する偏波共用アンテナと偏波検出処理を有し、水平偏波及び垂直偏波の受信信号の電力レベルを比較することにより、誘導装置が目標信号を検出する際に目標からの反射信号とECM信号を識別して、安定して目標を追尾することを可能にするものである。
(もっと読む)
物体識別装置及び物体識別方法
【課題】歩行者等の人物が計測対象物であっても確実に計測対象物を検出して識別することができる物体識別装置を提供する。
【解決手段】物体識別装置は、電磁波発生器101及び送信器102を用いて送信されて計測対象物OBによって反射した電磁波を受信器103によって受信すると、その受信信号の波形に基づいて、計測対象物OBに電磁波の吸収物が含まれている旨を吸収物検出部107によって検出し、吸収物検出部107によって検出された吸収物を含む計測対象物OBの種類を皮膚判別部108によって判別する。
(もっと読む)
FMCWレーダ装置用信号処理装置、FMCWレーダ装置用信号処理方法、FMCWレーダ装置
【課題】受信波から干渉を検出するFMCWレーダ装置、FMCWレーダ信号解析方法を提供する。
【解決手段】FMCWレーダ装置における送信波と受信波とのビート信号の信号処理を行うFMCWレーダ装置用信号処理装置であって、1つのアップビート区間又は1つのダウンビート区間であるサンプリング期間内にサンプリングされたビート信号である長さMサンプルの第1データを、該サンプリング期間内にK個連続して取得する取得部と、取得部により取得された第1データの周波数領域への変換を行い、該変換の結果を第2データとする第1変換部と、第1変換部により変換されたK個の第2データの中に、異常な第2データである異常データが存在する否かの判定を行う判定部とを備えた。
(もっと読む)
信号処理装置、レーダ装置、及び信号処理方法
【課題】アップ期間とダウン期間でピーク信号のレベルが一致する場合であっても、精度良くピーク周波数のペアリングを行う。
【解決手段】
周波数変調を施した第1のレーダ信号の周波数上昇期間に前記ビート信号の周波数スペクトルが極大値を形成する第1のピーク周波数と、前記第1のレーダ信号の周波数下降期間に前記ビート信号の周波数スペクトルが極大値を形成する第2のピーク周波数とを検出するピーク周波数検出手段と、所定周波数の第2のレーダ信号の送信時と受信時の周波数差に基づいて目標物体の相対速度を検出する速度検出手段と、前記相対速度が導出されるような前記第1、第2のピーク周波数のペアを抽出するペアリング手段とを有するので、ピーク周波数におけるビート信号のレベルがそれぞれ一致(または近似する)ピーク周波数をペアリングする場合であっても、精度良くペアリングを行うことができる。
(もっと読む)
レーダ装置
【課題】2個の受信機を用いモノパルス処理により測角を行う従来のレーダ装置は、ビーム幅内に目標が2個あると、2目標からの信号が位相情報を保持のまま加算されて受信されるため、各目標の振幅情報が失われ、正しい測角値が得られない。
【解決手段】目標からの反射信号を夫々のアンテナを介して受信し、アナログ/デジタル変換する複数の受信機と、各受信機で任意の同一時刻に受信された複数の受信信号と、前記時刻とは異なる時刻において、同時に各受信機で受信された複数の受信信号を用い、前記目標の振幅と、前記目標の位相と、前記同一受信機における異なる時刻間の前記目標の位相の変化量と、前記目標の角度で決定される空間位相を求め、この空間位相から前記目標を測角する測角処理装置を具備する。
(もっと読む)
誘導放射線療法システム
【課題】体の中の腫瘍のようなターゲットの位置を正確に確認し、追跡するためのシステム及び方法の提供。
【解決手段】ターゲットの中に又は近くに位置決め可能な信号を生じさせる外部例示ビーコンと、そのビーコンを遠隔操作により励磁させて、認識可能な信号を生じさせる外部励磁源と、互いに既知の幾何学的形体で間隔を隔てられた複数のセンサとを有する。コンピュータが、センサーに接続され、ビーコンの測定値を使用して、ターゲット内部のターゲットアイソセンタを識別するように形成される。コンピュータは、ターゲットアイソセンタの位置とマシンアイソセンタの位置とを比較する。コンピュータはまた、放射線治療前及びその間、ターゲットアイソセンタがマシンアイソセンタと一致するように、患者及び患者の支持装置の移動を制御する。
(もっと読む)
381 - 400 / 880
[ Back to top ]