
Fターム[5J070AH35]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | フーリエ変換を行なうもの(DFT、FFT、IFFT) (880)
Fターム[5J070AH35]に分類される特許
301 - 320 / 880
画像レーダ装置及び信号処理装置
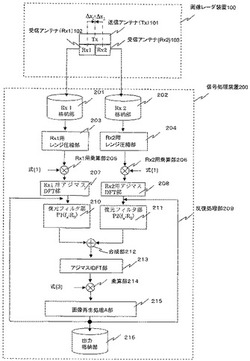
【課題】レーダの移動に伴いレーダビームの照射方向を変化させる複数ビーム観測方式を実現する画像レーダ装置及び信号処理装置を得る。
【解決手段】同一または異なるプラットフォームに送信アンテナ及び複数の受信アンテナを搭載する画像レーダ装置であって、前記送信アンテナ及び複数の受信アンテナは、レーダの移動に伴いレーダビームの指向方向を変化させながら観測する。また、送受信アンテナ間隔の2乗をレーダ波長と観測対象領域のレンジとの積の2倍で割ったものに円周率を乗じた位相を持つ複素関数が1とみなせるように、送受信アンテナ間隔、レーダ波長、観測対象領域までのレンジを設計する。
(もっと読む)
ドップラセンサ

【課題】 誤検出が抑えられるドップラセンサを提供する。
【解決手段】 送受信回路1が出力し送信信号の周波数と受信信号の周波数との差の周波数を有するドップラ信号を高速フーリエ変換するFFT部22と、FFT部22の出力において所定のノイズ判定時間以上にわたって振幅が所定のノイズ判定振幅以上であり続けている周波数であるノイズ周波数が存在する場合には、ノイズ周波数のうち最も低い周波数である除去対象周波数の成分を少なくとも減衰させるようにドップラ信号を整形した整形信号を生成して出力し、ノイズ周波数が存在しない場合には、ドップラ信号をそのまま整形信号として出力する信号整形部23と、信号整形部23が出力した整形信号に基いて検出範囲に移動物体が存在するか否かを判定する判定部24とを有する。
(もっと読む)
レーダ装置
【課題】所定の距離範囲の測定を短時間で処理可能なレーダ装置を提供する。
レーダ装置を提供する。
【解決手段】受信部120には、信号源として相関パルス発生源121とクロック発生源128を備えている。相関パルス発生源121で生成される相関パルス列は、パルス発生源111で生成されるパルスのパルス幅と等しいパルス幅の相関パルスを、A/Dコンバータ130でサンプリングを行うサンプリング周期Tsで複数個(L個)連続的に発生させる。また、クロック発生源128から出力されるクロック信号列は、上記の相関パルス列と同期しており、相関パルス列と同じサンプリング周期Tsでクロック信号をL個連続的に発生させる。このような構成とすることで、送信信号を1つ送出する度に、L個の異なる距離情報を取得できる。
(もっと読む)
検出装置
【課題】レーダによる物体検知範囲を広角範囲、または狭角範囲を切り替えて使用できるようにする。
【解決手段】アンテナ37−1は、電波を照射して送信信号を送信し、第1の間隔で1列ずつのアンテナが配置されたアンテナ51−2,51−3の対は、送信信号のうち、反射されてくる電波を受信し、第1の間隔よりも広い第2の間隔で、アンテナ51−1,51−2を1本のアンテナとし、アンテナ51−3,51−4を1本のアンテナとしたときのそれらの対は、送信信号のうち、反射されてくる電波を受信し、受信部12は、アンテナ51−2,51−3の対、または、アンテナ51−1,51−2とアンテナ51−3,51−4とをそれぞれ1本のアンテナとした対により受信された電波より受信信号を生成し、衝突予備動作用信号処理部13は、受信信号をサンプリングすることにより、物体を検出する。本発明は、車両安全装置に適用することができる。
(もっと読む)
非接触IC媒体通信装置、指向方向切替アンテナ装置、および非接触IC媒体存在方向判別方法
【課題】RFIDタグ50の存在方向を高速に検知する。
【解決手段】アンテナ部30bと、指向方向制御部30aと、デジタル制御回路11を備えた非接触通信装置1について、前記指向方向制御部30aは、RFIDタグ50からの信号を受信開始してから受信終了するまでの間にアンテナ部の指向方向を切り替える指向方向切替処理(ステップS2〜S8,S31〜S39,S42〜S49)を実行する構成であり、前記デジタル制御回路11は、各指向方向での受信レベルに基づいて前記RFIDタグ50の存在方向を判別する存在方向判別処理(ステップS16〜S20)と、前記アンテナ部30bの指向方向を切り替えつつRFIDタグ50から受信した一連の信号から前記RFIDタグ50の応答データを取得する応答データ取得処理(ステップS21)とを実行する構成とした。
(もっと読む)
目標検出装置及び目標検出方法
【課題】低S/N環境下においても目標を精度良く検出できるようにする。
【解決手段】目標検出器4は、目標からの反射波を観測した信号から目標の距離と周波数とを2次元で表す観測信号を求める解析処理器11と、複数の粒子フィルタを並列に用いて、観測信号と基準時刻より前に抽出された予測信号とをもとに、基準時刻における目標の距離と周波数の候補点を粒子分布で表した複数の予測信号を抽出する抽出処理器12と、抽出された複数の予測信号の粒子分布から、予め定められたしきい値を超えるゆう度を持つ粒子を、基準時刻における目標の距離と周波数とを示す目標信号として検出する検出処理器13と、検出された粒子の軌跡をもとに目標を追跡する追跡処理器14とを具備する。
(もっと読む)
ステップ周波数技術によるアンビギュアスピークを抑圧するためのシステム及び方法
【課題】信号を補償するシステム及び方法によって、真のレンジプロフィールから検出された複数のエコー信号による推定レンジプロフィールにおけるアンビギュアスピークを補償する。
【解決手段】本方法は、ステップ周波数処理を用いて非補償レンジプロフィール推定を決定するステップと、複数の焦点レンジビンの信号強度の各々に対して、推定レンジプロフィールに導入される複数のアンビギュアスピークの関連した予測電力レベルを決定するステップと、予測電力レベルを有するアンビギュアスピークにより破損された予想レンジビン位置を決定するステップと、非補償レンジプロフィール推定に基づいて、補償レンジプロフィール推定を生成するステップと、決定されたレンジビンに寄与される予測電力レベルが、各焦点レンジビンに対して調整されるように、補償レンジプロフィール推定を反復して更新するステップと、を含む。
(もっと読む)
レーダ信号処理装置およびレーダ信号処理方法
【課題】最小限のリソースで速度の分離精度を高めることの可能なレーダ信号処理装置を提供すること。
【解決手段】受信信号に対してドプラフィルタ処理部2により粗くドプラフィルタ処理を施し、各フィルタバンクにおける信号強度を用いた重心計算により、強度分布のピーク位置を得る。そしてこのピーク位置から特定したフィルタバンクにつき最小限の周波数レンジで再度、高精細のドプラフィルタ処理を施す。
(もっと読む)
レーダ装置
【課題】各探知距離領域において探知できない方位角範囲が広くならないようにできるレーダ装置を簡易且つ低廉な構成にて実現する。
【解決手段】送信部12は、同一種類の単パルス信号同士が一定の繰り返し周期となるように、複数種類の単パルス信号を特定の順で切り替えながら送信する。受信部15は、受信データ記憶部51とパルス積分部52とを備える。受信データ記憶部51は、種類毎のパルス応答データを時間的配列が認識できるように所定回数分記憶する。この際、新たなパルス応答データが入力されると、当該新たな応答データを含む新しい側の所定回数分のパルス応答データを保持するように更新記憶する。パルス積分部52は、同一種類のパルス応答データを新しいデータ側の特定個数分だけ読み出してパルス積分する。
(もっと読む)
レーダ装置
【課題】距離分解能、送信回数および処理距離範囲をそれぞれ独立に設定可能なレーダ装置を得る。
【解決手段】送信周波数が所定のステップ周波数だけ異なるM種類(M≧2)の周波数の信号にそれぞれ異なる変調を施した後に合成するとともに、送信毎にN(N≧2)を法とした送信回数の剰余演算結果をミキシングした送信信号をアンテナ部6から送信する送信部3と、送信部3からの送信波が目標で反射した当該目標からの反射波をアンテナ部6により受信し、当該受信信号をM点の離散フーリエ変換処理した後に前記変調を復調するDFT部7と、送信部3による送信毎に得られるDFT部7からのM個の出力をN回の送信にわたり保持し、そのM×N個の信号で離散逆フーリエ変換処理を行うIDFT部8とを備えている。
(もっと読む)
車両用物体検知装置
【課題】 統合手段により複数の物体候補を一つに纏めたグループが二つに分離するとき、正しいトラッキングが行われるようにする。
【解決手段】 物体候補位置検出手段M2が物体候補の位置を検出すると、統合手段M3が予め定められた結合領域内に検出された複数の物体候補を一つのグループに纏める。統合情報記憶手段M7に記憶した物体候補の相対位置が変化して単一のグループが複数のグループに分離した場合には、トラッキング手段M5は、走行車線推定手段M8で推定した自車が走行する走行車線上に分離前グループを構成していた物体候補の何れかが引き続き検知されているか否かを判定するとともに、引き続き検知されていると判定された場合には、その物体候補を含む分離後グループと分離前グループとの間に連続性があると判定するので、自車線に検知されていたグループが他車線に分離されたグループに誤って関連付けられて不適切な車両制御が行われるのを防止することができる。
(もっと読む)
車両用レーダ装置
【課題】複雑な処理を要することなく2つのFM−CW方式レーダ間の相互干渉を防止することができる車両用レーダ装置の提供。
【解決手段】本発明は、FM−CW方式を採用する第1及び第2のレーダ100,200を備え、前記第1及び第2のレーダのそれぞれの検知範囲が互いに重複する部分を有する車両用レーダ装置1であって、前記第1及び第2のレーダのそれぞれのFM−CW変調は、変調周波数が同一であり、前記第1及び第2のレーダのそれぞれのFM−CW変調の変調勾配(α1、α2;β1、β2)が正負逆になるように、前記第1及び第2のレーダのそれぞれのFM−CW変調の同期を取ることを特徴とする。車両用レーダ装置1は、前記第1及び第2のレーダのそれぞれにおいて、送信信号と受信信号に基づき得られるビート信号をフーリエ変換して周波数スペクトルを得て、該周波数スペクトルに基づいて、前記第1及び第2のレーダにより検出した物体の速度又は距離に関する情報を得る。
(もっと読む)
降水分布の推定システムおよび降水分布の推定方法
【課題】降水分布を精度良く推定する構成とした降水分布の推定システムおよび降水分布の推定方法の提供。
【解決手段】降水分布の推定システム1は、MPレーダ雨量測定手段2、
MPレーダ雨量を在来型雨量格子1kmに変換する変換手段3、空間ローパスフィルタ4、補正係数付与手段(回帰分析・品質管理)5を有する。また、在来型レーダ雨量測定手段6、空間ローパスフィルタ7を有し、フィルタ処理後のデータは補正係数付与手段5に送信される。MPレーダ雨量と在来型レーダ雨量は、ダイナミック補正手段8で補正され、MP−在来型合成雨量作成手段9でMP−在来型合成雨量(MP−JMA合成雨量)を作
成する。
(もっと読む)
人工物検出装置及び人工物検出方法及び人工物検出プログラム
【課題】多偏波観測によって人工物のみを精度よく検出する。
【解決手段】合成開口レーダを用いた2偏波観測あるいは4偏波観測の結果を偏波特性データ201として予め記憶する人工物検出装置100にて、散乱成分抽出部101は、偏波特性データ201から、表面散乱成分と2回散乱成分とを、観測位置ごとに抽出する。人工物検出部104は、散乱成分抽出部101により2回散乱成分が抽出された観測位置の集合である第1領域と、第1領域の周囲で散乱成分抽出部101により所定量以上の表面散乱成分が抽出された観測位置の集合である第2領域とを含む領域を、人工物として検出する。
(もっと読む)
目標捜索信号生成方法および目標捜索装置
【課題】目標が目標捜索信号と同一方向へ移動する速度成分を持つ場合であっても、探知性能や距離分解能の劣化がないレーダ装置等の目標捜索装置を提供する。
【解決手段】一方向の目標の捜索にチヤープ変調された複数のパルスを送信するレーダ信号を生成する際に、パルス幅と距離分解能との一方または両方を{Pw(i)・Dr(i)=Pw(1)・Dr(1)±Ti・(λ/2)}の関係が該複数のパルス相互において保たれるようにし、目標がレーダ信号と同一方向へ移動する速度成分を有することによる受信信号のドップラーシフトを補償して、各受信信号の圧縮される時間位置を同一にする。ここに、Pw(1)、Pw(i):第1、第i番目の送信パルスのパルス幅、Dr(1)、Dr(i):第1、第i番目の送信パルスの距離分解能、Ti:第1番目の送信パルスと第i番目の送信パルスとの時間間隔、λ:送信電波の波長。
(もっと読む)
対象物検知装置
【課題】対象物検知装置において、他の装置からの干渉波の影響を回避しつつ、迅速な距離検出を行う。
【解決手段】対象物検知装置1は、パルス信号を生成するパルス生成部2と、前記パルス信号を送信波WSとして空間に送信する送信部3と、前記パルス信号の反射波WRを受信して受信信号を出力する受信部4と、パルス信号の送受信時刻に基づいて対象物までの距離を求める距離検出部5と、受信信号に含まれる干渉波WXの有無を検出する干渉波検出部6と、干渉波検出部6によって干渉波WXの存在が検出されたときに、対象物検知装置1の動作モードを、パルス信号を送信して距離を求める距離検出モードから、干渉波WXを解析する解析モードに移行させるモード移行部7と、モード移行部7によって解析モードとされたときに干渉波WXの周波数を解析する干渉波解析部8とを備えている。
(もっと読む)
人工物検出装置及び人工物検出方法及び人工物検出プログラム
【課題】多偏波観測によって人工物のみを精度よく検出する。
【解決手段】合成開口レーダを用いた4偏波観測の結果を偏波特性データ201として予め記憶する人工物検出装置100にて、散乱成分抽出部101は、偏波特性データ201から、表面散乱成分と2回散乱成分と体積散乱成分とヘリックス散乱成分とを、観測位置ごとに抽出する。人工物検出部104は、散乱成分抽出部101により2回散乱成分と体積散乱成分とヘリックス散乱成分とのうち1種類以上の散乱成分が抽出された観測位置の集合である第1領域と、第1領域の周囲で散乱成分抽出部101により所定量以上の表面散乱成分が抽出された観測位置の集合である第2領域とを含む領域を、人工物として検出する。
(もっと読む)
レーダ装置
【課題】受信信号を積分処理するレーダ装置において、積分スイープ数の多いコヒーレント積分について、回路規模の増加を抑えつつ、すべての周波数成分の出力を可能とする。
【解決手段】レーダ装置は、データ入力部10、第1バタフライ回路20、第1セレクタ回路30、第2バタフライ回路40、及びデータ出力部50を有する。また、積分回路を前半と後半のバタフライ演算(第1及び第2バタフライ回路)をセレクタ回路で分離する。そして、セレクタ回路の選択位置によって出力する周波数成分を選択する。
(もっと読む)
センサ装置
【課題】人などの物体の有無をドップラセンサを用いて判定するセンサ装置の判定精度を向上することが可能な技術を提供する。
【解決手段】センサ装置100は、ドップラセンサ1と、A/D変換器2と、離散フーリエ変換部3と、算出部4と、判定部5とを備えている。A/D変換器2は、ドップラセンサ1から出力されるドップラ信号S1をディジタル信号に変換して出力する。離散フーリエ変換部3は、A/D変換器2の出力信号S2に対して離散フーリエ変換を行って、当該出力信号S2を周波数領域の信号に変換して出力する。算出部4は、離散フーリエ変換部3の出力信号S3から所定の複数の周波数成分を抽出し、当該複数の周波数成分の電力の総和を算出する。判定部5は、算出部4で算出された複数の周波数成分の電力の総和に基づいて、検出対象物の有無を判定する。
(もっと読む)
FMCWレーダ位置決め装置の拡散損失源による感度損失を検出する方法
本発明は、
FMCWレーダ位置決め装置の、拡散損失源(30)による感度損失を検出する方法であって、送信信号がレーダ位置決め装置により発せられ、送信信号の周波数は、連続する変調ランプにおいて周期的に変調され、レーダ位置決め装置により受信される信号の少なくとも1つの周波数部分の少なくとも1つの性能特性が評価される、上記方法において、送信信号の電力が周期的に、変調ランプの終了後ごとに変更され、感度損失が、同じ変調の連続する変調ランプにおいて受信される信号の性能特性の違いを用いて決定される方法に関する。
(もっと読む)
301 - 320 / 880
[ Back to top ]