
Fターム[5J070BE01]の内容
レーダ方式及びその細部 (42,132) | マッピング又はイメージング (396) | イメージング (274)
Fターム[5J070BE01]の下位に属するFターム
合成開口レーダによるイメージング (137)
Fターム[5J070BE01]に分類される特許
61 - 80 / 137
形状測定装置および該方法

【課題】本発明は、受信信号を得てからより短い時間で物体の形状を求め得る形状測定装置および形状測定方法を提供する。
【解決手段】本発明の形状測定装置は、物体に対して位置を変えながら送信パルスを放射することで受信された複数の受信信号の波形と送信パルスの波形との相互相関をそれぞれ求めて複数の相関波形を求める相関波形演算部131と、相関波形の極値を求めてこの極値を与える値を遅延時間として複数の相関波形のそれぞれについて求める遅延時間演算部132と、送信パルスの中心周波数および受信信号の中心周波数に基づいて遅延時間を補正する補正値を複数の相関波形のそれぞれについて求める補正値演算部133と、各補正値で補正された各遅延時間に基づいて擬似波面を求める、または各遅延時間に基づいて擬似波面を求め各補正値に基づき補正する擬似波面演算部134と、擬似波面に基づいて前記物体の形状を求める形状演算部135とを備える。
(もっと読む)
セミアクティブ式誘導装置

【課題】レーザー光の照射時間を短くし、高精度の誘導を行なうセミアクティブ式誘導装置を提供する。
【解決手段】飛しょう体に搭載される誘導装置本体は、パルス光の反射光から追跡目標を抽出するパルス同期反射光抽出部と、追跡目標に反射した可視光又は赤外線のから追跡目標を抽出する光源抽出部とを備える。追跡目標が遠距離にある場合にはパルス光に同期したパルス同期画像を基に誘導開始時に追跡目標を判定し、追跡目標が追跡目標に反射した可視光又は赤外線の撮像画像から判定するに十分な距離に近づいたとき可視光又は赤外線の撮像画像から追跡目標を判定するように選択を切替える。
(もっと読む)
マイクロ波検出システム、マイクロ波検出方法および道路監視システム
【課題】放電発光管より放射される微弱なマイクロ波を受信してマイクロ波検出センサーとして利用することが可能な安価なマイクロ波検出システムを提供する
【解決手段】検知対象物3にマイクロ波を放射する長管形状の放電発光管1と、該放電発光管から放射され、検知対象物3を透過するマイクロ波を受信する複数のマイクロ波受信機5で構成されたマイクロ波受信装置50とを備え、マイクロ波受信装置50を構成する複数のマイクロ波受信機5は、放電発光管1の長手方向に平行する方向で、放電発光管1に対向して並べて配置されている。
(もっと読む)
検査方法及び検査装置
【課題】送信アンテナから受信アンテナに直接到来する干渉波の影響を抑制する。
【解決手段】検査装置は、直線S1に沿って配列された送信アンテナ21−1〜21−4、直線S1に平行な直線S2に沿って配列された受信アンテナ22−1〜22−4、送信信号を生成する発振器、送信信号が入力される検波器、スイッチ、画像処理装置を具備する。送信アンテナ21−1は、送信信号に基づいて電波を出力する。受信アンテナ22−2は、受信した電波に基づいて受信信号を出力する。スイッチは、送信アンテナ21−1と発振器が接続されているときに、受信アンテナ22−2と検波器とを接続する。検波器は、受信信号に基づいて検波信号を生成する。画像処理装置は、検波信号に基づいて画像のデータを生成する。送信アンテナ21−1と受信アンテナ22−2との距離は、送信アンテナ21−1と受信アンテナ22−1との距離より長い。
(もっと読む)
自律移動装置及び平面状障害物認識方法
【課題】自律移動装置において、壁などの平面状障害物の位置を単純な手順により容易に認識可能とし、正確に自己位置を特定して、効率的で安全な自律走行を可能とする。
【解決手段】水平面内をスキャンし、反射波を受信して複数のスキャンポイントの座標を取得し、時系列的に前後する2つのスキャンポイントについて、要素ベクトルを形成し、複数の要素ベクトルの中から時系列的に前後し、かつ互いに連続する複数の要素ベクトルで、その長さが第1所定長以下であり、角度が第1所定角度以下であり、角度の積算値が第2所定角度以下であるものを選択し、ベクトル合成して1つのスキャンセグメントベクトルとし、スキャンセグメントベクトルの始点と終点により定義される線分が第2所定長以上であるときに、そのスキャンセグメントベクトルに沿って平面状障害物が存在していると認識する。
(もっと読む)
検出装置及び検出方法
【課題】検出器に入射する電磁波の平均パワーの大きさを調整することで、検出器のSN比がほぼ最大となるようにして測定対象からの信号を検出し、得られる画像などの情報の質を向上させた検出装置及び方法を提供する。
【解決手段】画像形成装置などの検出装置は、電磁波検出器2と、パワー調整手段4と、信号処理部6とを有する。電磁波検出器2は、30GHzから30THzの範囲の少なくとも一部の周波数を含む電磁波のパワーの大きさに対してSN比がピーク位置を持つ特性を有する。パワー調整手段4は、電磁波が照射される測定対象3から電磁波検出器2へ入射する電磁波の平均パワーの大きさを調整する。信号処理部6は、電磁波検出器2で検出した信号とパワー調整手段4によるパワー調整の情報に基づいて、測定対象3の情報を取得する。
(もっと読む)
ミリ波撮像装置及び撮像画像表示装置
【課題】被写体から放射されるミリ波を利用して被写体を撮像するミリ波撮像装置において、受信部の小型化及びコストダウンを図る。
【解決手段】被写体2から放射されるミリ波から被写体2を撮像することで、衣服などで隠された検査対象物4を透視した透視画像の画像データを生成し、ディスプレイ35に表示する装置において、画像データは、レンズアンテナ12により結像された被写体像を、ポリゴンミラー14を介して水平方向(x軸方向)及び垂直方向(y軸方向)に走査させることで、被写体像の各画素に対応する各ミリ波を順次受信部20に入射させ、受信部20から出力される検波信号を順次サンプリングする、といった手順で生成する。また、画像データは、周波数の異なるミリ波を受信することで複数の画像データを生成し、これを合成することで最終的な画像データを生成する。
(もっと読む)
検出装置
基板(11b、11c)を備えた反射手段が、周波数が3×109Hzと1013Hzとの間にある電磁放射線を選択的に反射し、例えば、放射線(12)が入射するようにされた高抵抗率のシリコン層と、電荷キャリアを生成するために、例えば波長が5μmと100nmとの間にある電磁放射線で基板面を照射することにより、層内で電荷キャリアを選択的に生成して放射線を反射するための手段をと含む。反射手段は撮像装置の一部を形成することができ、この撮像装置では、同軸構成の反射手段を通過する放射線により撮像対象のシーンを照射し、反射された放射線を反射要素が受光する間に反射領域をその表面全体にわたって走査してシーンから反射された放射線流を作り出し、この放射線流を検出し、使用してディスプレイを駆動する。走査スポット以外の反射手段の領域からの反射により生み出されるノイズを交差偏光器によって低減することができ、基板には、これらの偏光器を形成するとともに走査構成を単純化するために溝を設けることができる。他の用途は、化学的特徴を検出するためのものである。 (もっと読む)
電磁波レーダによる鉄筋コンクリート構造物中の鉄筋径の非破壊計測装置及び非破壊計測方法
【課題】鉄筋コンクリート構造物中の異形鉄筋の径を簡便に計測する非破壊計測方式を提供すること。
【解決手段】送信アンテナと受信アンテナとを備えた電磁波レーダを異形鉄筋に沿って鉄筋コンクリート構造物表面を走査し所定ピッチ毎に電磁波の送受信を繰り返すステップと、前記異形鉄筋から反射される電磁波の伝播時間を時系列的に格納するステップと、前記格納された前記伝播時間の時系列データを周波数分析するステップと、前記周波数分析による最大ピーク位置に基づいて前記異形鉄筋の節の平均間隔を求めるステップと、前記平均間隔に従って、所定の対応表に基づいて鉄筋径を判断するステップと、を備える。
(もっと読む)
危険な対象および物体を検出するためのシステムおよび方法
危険な対象および物体を検出するためのシステムおよび方法が開示される。一実施形態に従って、方法は、マイクロ波信号を生成することを包含し、このマイクロ波信号は、標的によって反射され、1つ以上の反射信号となる。1つ以上の反射信号は、アンテナアレイで受信される。1つ以上の反射信号は、デジタル反射信号に変換される。マイクロ波信号は、デジタル信号に変換される。デジタル反射信号およびデジタル信号は処理され、標的の三次元位置を決定する。デジタル反射信号およびデジタル信号は処理され、標的を識別する。デジタル反射信号およびデジタル信号は処理され、標的の状態を決定し、標的が危険な対象であるかどうかを決定する。  (もっと読む)
(もっと読む)
距離撮像
【課題】多数の距離画素を用いて距離像を撮像する。
【解決手段】撮像されるべき各々の距離像のためにアレイ配置された複数の送信器を使用して電磁波がそれぞれ送信パルスの形で送信され、反射されたエコーパルスはアレイ配置された複数の受信器を使用して検出され、前記送信パルスが反射されて距離画素を形成する物体のそれぞれの距離は前記パルス飛行時間の算出によって測定され、撮像されるべき各々の距離像のために前記受信アレイの後に接続された時間測定器を使用して複数の個別測定が実施される。
(もっと読む)
材料を検査するためのマイクロ波装置
本発明は、材料(150)に放射するための搬送周波数Fpの電磁信号を送信するための手段(110)と、電磁信号を受信するための手段(130)とを少なくとも備える、材料(150)を検査するための装置(100)であって、送信された電磁信号を空間的に標本化するために、送信手段(110)と材料(150)との間の信号経路に設けられている、電磁信号を周波数Fm1で変調するための第1変調手段と、材料(150)を通過した電磁信号を空間的に標本化するために、材料(150)と電磁信号受信手段(130)との間の信号経路に設けられている、電磁信号を周波数Fm2で変調するための第2変調手段(140)とをさらに備えることを特徴とする装置に関する。 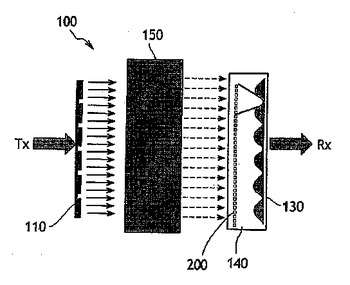 (もっと読む)
(もっと読む)
物体識別装置および物体識別方法
【課題】物体から放射される電磁波の電波領域での放射強度に基づいて物体を検出して識別する物体識別装置において、環境変化や経時劣化により受信素子の感度特性が変化した場合でも精度高く物体識別を行うことが可能な物体識別装置を提供する。
【解決手段】物体から放射される電磁波の電波領域での放射強度を検出する複数の受信素子130と、受信素子130の出力信号に基づき放射強度画像を生成する放射強度画像生成部150と、放射強度画像に基づき検出した物体の位置と形状および放射強度とに基づき物体の識別を行う物体識別部200と、受信素子130に対し電波領域において電磁波を放射する放射部160と、受信素子130の出力信号が所定値以下である場合に放射部160から電磁波を放射し、受信素子130の出力信号に基づき受信素子130の感度特性が均一であるように出力信号の補正を行う出力補正部140とを備える。
(もっと読む)
物体識別装置
【課題】放射物体と反射物体とを容易に識別可能な物体識別装置を提供する。
【解決手段】物体A,Bから放射される電波領域での放射量を検出し、その検出結果に基づいて電波放射強度画像を生成する電波イメージング部200と、前記電波放射強度画像を時系列的に蓄積するとともに、その蓄積した複数の電波放射強度画像を比較して電波放射強度画像の時系列的な偏差を演算する画像演算部300と、電波イメージング部200で生成した電波放射強度画像と画像演算部300で演算した時系列的な偏差情報に基づいて物体A,Bを認識する認識処理手段(放射量演算部400および物体認識処理部500)とを備え、前記認識処理手段は、電波放射強度画像のうち時系列的な偏差が所定値以上大きい部分には反射率の大きい反射物体が存在すると判断し、電波放射強度画像から反射物体を除外することにより、反射物体と放射物体とを識別する。
(もっと読む)
SAR搭載機速度測定装置、画像鮮明化装置、SAR搭載機速度測定プログラム、画像鮮明化プログラム及びSAR搭載機速度測定方法
【課題】SAR(Synthetic Aperture Radar)搭載機速度を高精度に知ることにより、高分解能画像を得ることを目的とする。
【解決手段】SAR搭載機の予測移動情報と目標物の移動情報とに基づいたSAR搭載機と目標物との距離関係情報に基づき、SAR搭載機の速度を画像から推定する。また、SAR搭載機の速度を高次多項式で表現し、各次数の係数を画像から推定することで、より高精度なSAR搭載機の速度を得る。高精度なSAR搭載機の速度に基づき画像を再生する。
(もっと読む)
画像レーダ装置
【課題】目標の3次元形状を高精度に取得可能な画像レーダ装置を得る。
【解決手段】送信電波W1を照射する電波照射手段4と、目標Tからの受信電波W2に基づき目標T上の反射点の3次元分布を投影面に投影した画像を生成するレーダ画像再生部6と、反射点像を抽出する反射点抽出部8と、反射点像の対応付けを取る画像間反射点対応部9と、対応付けの取れた反射点の、各画像上でのレンジ軸方向およびクロスレンジ軸方向の位置を推定する反射点位置履歴推定部15と、レーダ画像再生部6で再生される画像の投影面を特定するレンジ軸ベクトルおよびクロスレンジ軸ベクトルを推定する画像投影面履歴算出部12と、各画像におけるレンジ軸ベクトルおよびクロスレンジ軸ベクトルと、各反射点の画像におけるレンジ軸方向およびクロスレンジ軸方向の位置とに基づいて各反射点の3次元位置を推定する目標形状算出部14とを備えている。
(もっと読む)
レーダ装置及び画像処理方法
【課題】信号のドップラー周波数変化量Δfによって決まる分解能以上に、目標散乱点を検出できる合成開口レーダ装置を得る。
【解決手段】本発明のレーダ装置は、画像の再生基準となる参照関数と観測データとを周波数領域で乗算し、時間軸に戻して再生画像を得る構成において、上記参照関数の時間経過と設定スレショルド値との比較で得られる所定時間からの経過値であるシフト量を算出するシフト量算出部15と、上記観測データを周波数処理した観測スペクトラムを時間軸に戻し、かつ得られた上記シフト量だけずらせて加算して加算信号を得るシフト加算部16a,16bと、を備えて、上記シフト加算部で得られる差分画像信号を上記再生画像と乗算して高分解能再生画像を得るようにした。
(もっと読む)
海洋レーダ装置
【課題】海洋レーダでは、海洋流速分布を算出する際、複数サイトにて算出される視線方向流速を合成する。しかし、この方法では、各レーダサイトからの視線方向の交差角が90度より大きく離れる観測エリアにおいては、観測精度が劣化する。そのため、それぞれのレーダサイトの観測覆域の一部しか流速ベクトルの解析に利用できないこと、及び、観測対象覆域に適合する複数レーダサイト設置位置の選定が困難などの問題があった。
【解決手段】レーダ画像から、観測周期及び実際上あり得る最大海流速度より算出されるメッシュエリア毎に、エコー強度分布より波紋パターンを抽出し、その移動量より上記エリアについての流速を算出する。1レーダサイトの情報のみでレーダの覆域と同じ領域において、均一な精度で海流速度を算出可能にする。
(もっと読む)
気象データ推定装置及び方法
【課題】対象範囲の任意の3次元格子点における気象要素を、対象範囲の選び方によらず、対象範囲に含まれる気象観測データだけを用いて、仮想的な気象観測データを追加することなく一意的に推定できる装置及び方法を提供する。
【解決手段】気象データ推定演算部12において、微小重み係数判定部122で、各格子点について全観測点の重み係数があらかじめ設定した微小しきい値以下であるかどうかを判定し、そのような格子点(重み係数微小格子点)の総数と全格子点に対する割合を算出するとともに、微小重み係数修正処理部123で、前記重み係数微小格子点について、1つ以上の観測点の重み係数が前記微小しきい値を超えるように重み係数をあらかじめ定めたルールにしたがって修正することにより、気象データ一次推定処理部124で全格子点において妥当な気象データ一次推定値が得られるようにする。
(もっと読む)
構造物形状推定装置、障害物検出置および構造物形状推定方法
【課題】構造物の形状を精度良く推定することができる構造物形状推定装置、障害物検出装置および構造物形状推定方法を提供すること。
【解決手段】自車両の進行方向に存在する構造物の形状を推定する構造物形状推定装置において、自車両進行方向に存在する物体の位置を検出する前方ミリ波レーダ3と、自車両進行方向に存在する物体の位置を検出する前方ミリ波レーダ3と検出方法が異なる画像検出装置4と、前方ミリ波レーダ3により検出された物体の位置に基づいて、近似領域を設定する近傍領域設定部21と、この前方ミリ波レーダ3により検出された物体の位置およびこの設定された近似領域内の画像検出装置4により検出された物体の位置に基づいて構造物の形状を推定する構造物形状推定部22と、を備える。
(もっと読む)
61 - 80 / 137
[ Back to top ]