
Fターム[5J070BE02]の内容
レーダ方式及びその細部 (42,132) | マッピング又はイメージング (396) | イメージング (274) | 合成開口レーダによるイメージング (137)
Fターム[5J070BE02]に分類される特許
1 - 20 / 137
マイクロ波イメージングシステム及びイメージング処理方法
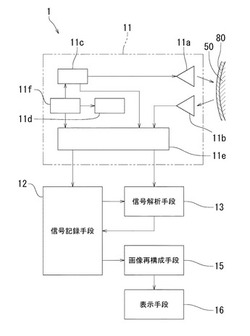
【課題】物体とそのモデルについての超短パルスの反射波信号をそれぞれ用いて物体表面での反射波成分を除去し、マスキングされていた物体内の検出対象物からの反射波成分を確実に取得して、検出対象物の状況を適切に画像化して評価可能とする、マイクロ波イメージングシステムを提供する。
【解決手段】物体50にこの物体表面形状を模したカバー80を被せた状態で取得した主反射波信号と、物体に近い誘電率の材料を用いて製作された物体モデルにカバーを被せた状態で取得した副反射波信号とを信号解析手段13で比較し、主反射波信号における表面部からの反射波成分を、副反射波信号における表面部からの反射波成分で打消すことで、主反射波信号での検出対象物からの反射波成分を相対的に強調でき、検出対象物の画像化を精度よく実行でき、画像再構成で得られた画像から検出対象物を適切に検出できる。
(もっと読む)
観察装置

【課題】信号取得レートが低い検波器を用いる場合であっても移動している対象物の像を高速に高感度で得ることができる観察装置を提供することを目的とする。
【解決手段】観察装置1は、信号発生部SG、回折波発生部10、検出部20、および演算部30を備える。回折波発生部10は、移動している対象物2に電波を照射して回折波を発生させる。検出部20は、検波面上の各位置に到達した電波のドップラーシフト量に応じた周波数で時間的に変化するデータのv方向についての総和を表すデータを、u方向の各位置について各時刻に出力する。演算部30は、検出部20の出力に基づいて対象物2の像を得る。
(もっと読む)
自動化されたビームのレイアウト
【課題】 自動化されたビームのレイアウトを改良する。
【解決手段】 自動化されたビームのレイアウトのためのシステムであって、前記システムは以下を備える:
境界ポジション・モジュールであって、
画像フレームの境界に沿って複数の境界ポジションを生成するため、及び
複数のビーム・ロケーションに基づいて前記複数の境界ポジションを改変するため
に設計された該モジュール;並びに
ビーム・ロケーション・モジュールであって、前記複数のビーム・ロケーションはそれぞれ前記画像フレームの前記境界内にあり、前記複数の境界ポジションと、並びにマッピング優先度、ビーム・プラットフォームの動く方向、及び前記ビーム・プラットフォームの動く速さのうちの少なくとも1つとに基づいて、前記複数のビーム・ロケーションを決定するために設計された該モジュール。
(もっと読む)
不均一なパルスタイミングを用いた高解像度SAR撮像
【課題】合成開口レーダー(SAR)システムが、不均一パルス発生器と、エコー受信機とを備える。
【解決手段】SAR画像が、受信エコーのサンプルから再構築され、送信パルス及び反射エコーが時間において重なり合う。送信パルスは、高いアジマス解像度を達成する比較的高い平均パルス繰返し周波数を有する。送信パルスは互いに直交するか又は非コヒーレントであり、重なり合った受信パルスの分離を可能にする。再構築手段は反復的である。再構築手段は圧縮センシングを用いる。パルスタイミングがランダム又は疑似ランダムである。パルスタイミングは周期的に不均一である。重なり合ったパルスからの欠落データが時間において異なる相対ロケーションにある。欠落データは、SAR画像において均等に分散され、対象エリアのカバレッジが実質的に均一である。
(もっと読む)
合成開口レーダーシステムによって取得された入力信号を処理する方法
【課題】本方法は、アジマスアンビギュイティ(azimuth ambiguity:アジマス曖昧性)を制御し、画像モデルを組み込んで飽和したSARデータからの再構成を可能にする。
【解決手段】合成開口レーダー(SAR)システムによって取得された飽和入力信号が、該入力信号を生成した再構成を推定し、推定された再構成から入力信号を再生して再生信号を生成し、該再生信号を入力信号と比較し、推定された再構成を該比較に基づいて調整し、終了条件に達するまで再生するステップから反復することによって処理される。
(もっと読む)
レーダ装置及び目標探知方法
【課題】被探知目標を適正に探知する開口合成を可能とする。
【解決手段】目標を探知するレーダ装置において、空間位相が等しくなる2以上の基準パスを形成する2以上の送信アンテナと受信アンテナとの組合せを含む、2以上の送信アンテナ,及び2以上の受信アンテナと、各基準パスにおける受信アンテナで受信される受信信号の包絡線を取得する包絡線検波部と、各基準パスの受信信号の包絡線間の積分距離の最小値を与える遅延量から基準パス間の位相補正量を決定する決定部と、決定された位相補正量を用いて、2以上の受信アンテナで受信される全ての受信信号の位相を揃える補正部とを含む。
(もっと読む)
ドップラーレーダーシステム、ドップラーレーダー送信装置及び送信波最適化方法
【課題】本発明は、検出対象物体を容易にかつ精度よく検出するための相関処理に基づくドップラーレーダー送信装置を提供することを目的とする。
【解決手段】本発明は、ドップラーレーダー受信装置において自己相関が算出される検出対象物体からの反射波及び予め定められた参照波の周波数スペクトルが同一となるように、検出対象物体の移動速度のうち検出対象となる移動速度、自己の移動速度及びレーダー波の伝搬速度に基づいて、送信波の周波数スペクトルを調整する可変周波数発振部414及び読み出しアドレス生成部415と、送信波を検出対象物体に照射する送信波照射部と、を備えることを特徴とするドップラーレーダー送信装置である。
(もっと読む)
レーダ画像処理装置
【課題】理想的な直線軌道から逸脱した複雑な軌道条件下で撮像されたSARデータに対しても、適切な動揺補償処理を行うことにより、分解能劣化の伴わない画像を生成することが出来るレーダ画像処理装置を得る。
【解決手段】レーダ画像処理装置は、プラットフォームの実際のスラントレンジ変化Ractとそれを近似する理想的なスラントレンジ変化Ridealとを算出し、実際のスラントレンジ変化Ractと理想的なスラントレンジ変化Ridealとの差分に基づいて動揺補償量φを算出する動揺補償量算出部1と、動揺補償量算出部1により算出された動揺補償量φを用いて受信信号に対して位相補償を行う動揺補償処理部2とを備える。
(もっと読む)
識別装置
【課題】目標の識別精度を高くする。
【解決手段】実施形態の識別装置は、選択部、学習部、入力受付部、特徴抽出部、特徴量計算部、類似度計算部、識別部、及び出力制御部、を備える。選択部は、各学習サンプルが複数のカテゴリのいずれかに分類される複数の学習サンプルから学習サンプルを1以上含むグループを複数選択する選択処理を複数回行う。学習部は、選択された複数のグループ毎に当該複数のグループを識別する識別基準を学習し、複数の識別基準を含む評価基準を生成する。入力受付部は、目標からのレーダエコーに基づく画像の入力を受け付ける。特徴抽出部は、画像から目標の輪郭形状の特徴を表現する特徴ベクトルを抽出する。特徴量計算部は、評価基準を用いて特徴ベクトルの特徴量を計算する。類似度計算部は、特徴量と識別特徴量の類似度を計算する。識別部は、類似度を用いて目標を識別する。出力制御部は、識別結果を出力部に出力させる。
(もっと読む)
レーダ画像処理装置
【課題】合成開口時間が長いことで大きなスクイント角での観測や、レンジの帯域幅が大きい観測でも、処理効率を低下させずに画像劣化のない高分解能な画像を生成するレーダ画像処理装置を得る。
【解決手段】レーダ画像処理装置は、レーダ装置の移動と送信波のレンジ帯域に基いて受信信号をアジマス方向に分割し、分割した受信信号にフーリエ変換をアジマス方向に施し、フーリエ変換を施した受信信号にパルス圧縮処理をレンジ方向に施し、レンジ方向に圧縮した受信信号にアジマス方向の参照関数を乗算してアジマス方向位相補償信号を生成し、アジマス方向位相補償信号にスケーリング処理をアジマス方向に施し、アジマス方向にスケーリング処理した受信信号にアジマス方向の逆フーリエ変換を施し、アジマス方向に逆フーリエ変換を施した受信信号を合成して高分解能画像を生成する。
(もっと読む)
速度推定装置及びコンピュータプログラム及び速度推定方法
【課題】合成開口レーダによって観測された観測対象の速度を正しく推定する。
【解決手段】圧縮観測算出部(アジマス圧縮部120)は、複数の推定速度それぞれについて、上記受信信号から生成された所定のサンプリング間隔を有する一連の観測値と、上記推定速度に対応する参照信号との間の相関を取ることにより、上記所定のサンプリング間隔よりも短いサンプリング間隔を有する一連の圧縮観測値を算出する。ピーク抽出部141は、上記複数の推定速度それぞれについて、上記圧縮観測算出部が算出した一連の圧縮観測値のピークを抽出する。速度推定部151は、上記複数の推定速度のなかから、上記ピーク抽出部141が抽出したピークが極大となる推定速度を求めて、上記観測対象の推定速度とする。
(もっと読む)
画像識別装置および検出装置
【課題】
目標の両端部分の一部が欠落している時系列画像であっても、目標の識別及び検出を自動で行う装置を提供する。
【解決手段】
目標からのレーダエコーを処理してフレーム単位で生成される時系列画像を用いて前記目標の識別を行う画像識別装置であって、レーダエコーを処理して生成される画像を取得する取得部と、
前記画像に含まれる輝度値の変化率から算出される主軸を用いて前記目標の両端候補を抽出する抽出部と、前記画像と前記両端候補を用いて、予め保持している辞書との類似度を算出する算出部と、前記両端候補毎に得られる前記類似度から目標の識別を行う識別部と、前記識別部の結果を出力する出力部とを具備する。
(もっと読む)
目標物検出画像生成装置、目標物検出装置、クラッタ画像生成装置、目標物検出画像生成プログラム、目標物検出プログラム、クラッタ画像生成プログラム、目標物検出画像生成装置の目標物検出画像生成方法、目標物検出装置の目標物検出方法およびクラッタ画像生成装置のクラッタ画像生成方法
【課題】目標物だけを高い検出率で検出できるようにすることを目的とする。
【解決手段】レファレンスセル抽出部110は、レーダ画像191からターゲットセル101aを選択し、レーダ画像191からレファレンスセル101bを抽出する。画素平均値算出部120はレファレンスセル101bの画素平均値102を算出する。画素標準偏差算出部130はレファレンスセル101bの画素標準偏差103を算出する。標準偏差補正値算出部140は画素平均値102と画素標準偏差103との差を標準偏差補正値104として算出し、目標物検出画像生成部141は標準偏差補正値104をターゲットセル101aに対応する目標物検出画像194の画素領域に設定する。目標物検出部150は、目標物検出画像194から検出閾値より大きい画素領域を目標物領域として特定し、特定した目標物領域に対応する座標値を目標物座標値195として算出する。
(もっと読む)
移動体特定装置、移動体特定プログラム及び移動体特定方法
【課題】SAR画像データに含まれる移動体と、送信情報を送信した移動体とを高精度に対応付けすることを目的とする。
【解決手段】画像情報計算部2は、SAR画像から、前記SAR画像に含まれる移動体の速度を計算し、計算した速度に基づきその移動体の位置を計算する。補完情報特定部3は、移動体から送信された送信情報から、前記SAR画像が撮像された際のその移動体の位置を特定する。そして、相関度計算部4は、画像情報計算部2が計算した位置と、補完情報特定部3が特定した位置との相関度を計算し、対応付部5は、相関度計算部4が計算した相関度に基づき、SAR画像に含まれる移動体と送信情報を送信した移動体とを対応付ける。
(もっと読む)
船舶探知装置、船舶探知プログラムおよび船舶探知装置の船舶探知方法
【課題】レーダ観測により得られた画像データに基づいて船舶を高い精度で探知できるようにすることを目的とする。
【解決手段】CFAR方式演算部120は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶推定領域としてCFAR方式で特定する。ウエーキ方式演算部121は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶特定領域としてウエーキ方式で特定する。SC比マップ生成部130は、偏波組み合わせ毎に、船舶候補領域(船舶推定領域、船舶特定領域の一部)にSC比(海面散乱波の推定強度に対する船舶散乱波の推定強度)を設定してSC比マップ197を生成する。SC比合算マップ生成部140は、偏波組み合わせが異なる複数のSC比マップ197a〜Nを合算してSC比合算マップ198を生成する。船舶探知部150は、SC比合算マップ198に基づいて船舶領域を特定する。
(もっと読む)
目標物速度特定装置、目標物速度特定プログラム及び目標物速度特定方法
【課題】少ない計算量で高精度に目標物の速度を特定することを目的とする。
【解決手段】刻み幅特定部3は、SAR搭載機の速度vpと距離R0と電波の波長λと合成開口時間τと目標物のアジマス方向の予測速度va’とを用いて表された振幅値V0vazの関数に、SAR画像データの観測条件であるSAR搭載機の速度vpと距離R0と電波の波長λと合成開口時間τとを入力し、予測速度va’に対応する振幅値V0vazを計算する。刻み幅特定部3は、振幅値V0vazが所定の値以上になるアジマス方向の予測速度va’の範囲を処理装置により特定し、特定した範囲の幅以下の幅を刻み幅Δva1とする。そして、特定処理実行部は、刻み幅Δva1を用いて、目標物のアジマス方向の速度を処理装置により特定する。
(もっと読む)
画像表示装置
【課題】差分画像または干渉画像内の移動目標の視認性の向上を図るとともに、原画像の画像情報を差分画像または干渉画像の情報と共に併せて確認することが可能な、画像表示装置を得る。
【解決手段】同じ撮像エリアを含む複数の原画像1,2に対して位置合わせを行うレジストレーション部3と、それらの位相補正を行う位相補正部4と、位置合わせおよび位相補正が行われた原画像1,2を用いて、それらの画像の差分画像であるDPCA画像8(または干渉画像)を作成する差分画像生成部5と、当該DPCA画像8に利得を付与する利得付与部6と、原画像1,2の各々および作成されたDPCA画像8(または干渉画像)に、互いに異なる配色(赤、青、緑)を割り当て、それらを重畳して表示する画像重畳部7とを備えている。
(もっと読む)
レーダ装置、目標類別装置及び目標類別プログラム
【課題】ISAR画像における目標の一部が欠落している場合等において、目標の構造物間の絶対長を測定しなくても良好な類別結果を取得することが可能なレーダ装置、目標類別装置及び目標類別プログラムを提供する。
【解決手段】特徴点設定部531は、二つの指定特徴点間の基準距離に基づき、取得したISAR画像から基準相対位置情報を生成する。また、再計算部532は、記憶部60に記憶された複数の目標形状情報に基づいて、複数の相対位置情報サンプルを生成する。そして、類似度判定部533により、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を算出し、算出した類似度に基づいた目標形状情報を選択する。
(もっと読む)
画像レーダ装置
【課題】位相補償精度を向上させて、再生画像の分解能を向上させた画像レーダ装置を得る。
【解決手段】レーダ観測器は、レンジプロフィールの取得処理を、目標との相対位置関係を変えながら繰り返し実行してレンジヒストリを取得する。レーダ画像化器は、レンジ補償器12と、レンジ補償器12によるレンジ補償後のレンジヒストリS1(r,h)上の代表的な複数の反射点の位相変化を調べ、レーダ画像のドップラー周波数方向のぼけの原因となるヒットに対する2次以上の不要位相変化の、最終的にクロスレンジ圧縮に用いるヒット幅の範囲での値を推定する不要位相変化推定器21と、不要位相変化推定器21で得られた不要位相変化φ2(h)に基づき、レンジ補償後のレンジヒストリS1(r,h)から、最終的にクロスレンジ圧縮に用いるヒット幅分だけ切出したレンジヒストリに含まれる不要位相変化成分を補償する位相補償回路22と、を備える。
(もっと読む)
画像レーダ装置
【課題】画像化する領域における補償誤差を小さくしつつ、分割する領域のサイズを従来のものよりも大きくして画像再生処理の効率を向上させるとともに、分割する領域の数を減らして結合後の画像における不連続部分を減らすことができる画像レーダ装置を得る。
【解決手段】軌道データ格納部12に格納されたプラットフォームの実軌道の軌道データに基づいて、参照軌道を算出する参照軌道算出部21と、地表上に、位相補償に用いられる複数の基準点を設定する複数基準点設定部22と、実軌道および参照軌道と基準点との距離差に基づいて、位相補償量を決定する補償量決定部23と、位相補償量に基づいて、観測データ格納部13に格納された観測データの位相を補償する補償処理部31と、位相補償後の観測データに対して画像再生処理を実行し、レーダ画像を再生する再生処理部32とを備える。
(もっと読む)
1 - 20 / 137
[ Back to top ]