
Fターム[5J083AF15]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送受波器(センサ、ソーナー)の設置 (1,005) | 移動体設置 (814) | 船舶 (199)
Fターム[5J083AF15]の下位に属するFターム
船底 (138)
Fターム[5J083AF15]に分類される特許
1 - 20 / 61
音響画像生成システム、音響画像生成方法、および音響画像生成プログラム
【課題】検知した水中音波に基づき水中目標物の正確な位置を示す音響画像を生成するシステムを提供する。
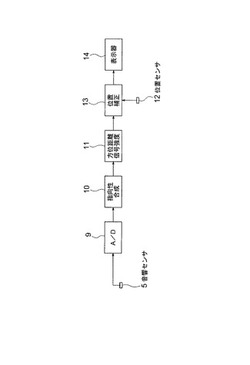
【解決手段】水中の反射音を捕捉する音響センサ部5とこの反射音に基づき水中の物体の位置を示す音響画像を生成する画像データ生成部とを備え、反響音の水平方向の指向性を示すビームを合成する指向性合成部10と、反射音を捕捉した受信時刻と各反響音ビームの指向性に基づき船舶からの方位および距離として特定される各地点における反響音のレベルを導出する信号強度導出部11と、各位置情報に対応して導出した異なる反響音のレベルを積分して得た値に色情報を割り当てて表示する表示器14を備えた。
(もっと読む)
水中目標物検出装置、該検出装置に用いられる目標物検出方法及び目標物検出プログラム

【課題】水中目標物検出装置での目標物のアスペクト及び方位、全長の推定精度を向上させる。
【解決手段】発振器31から送波器32に駆動信号adが与えられ、音波パルスapが送波される。受波器33により、音波パルスapが目標物20に到達したときの反射波の直接波df,de及びマルチパス波mf,meが合わせて受波されて受信信号wrが出力される。受波指向性合成部34により、受信信号wrが入力され、目標物20を指向するように受波ビームが指向性合成されて合成受信信号trが出力される。マルチパス補正部35により、合成受信信号trから、予め保持されているマルチパス波受信信号の時間幅を特定する情報を基にマルチパス波受信信号が除去され、直接波df,deに対応する直接波受信信号drが出力される。相関処理部36により、直接波受信信号drに基づいて、位相の相異なる直接波受信信号dr同士の相関値が算出されて目標物20が検出される。
(もっと読む)
水中作業管理装置
【課題】水中ポジショニングシステムを利用した水中作業において、潜水士に喚起する手段、例えば、警報や退避指示を水中ポジショニングシステムから直接送る伝達手段を提供する。
【解決手段】水中作業管理装置は、船11に設けた送受波器12から発射される超音波を、潜水士13が携帯するトランスポンダ14で受信し、該受信した信号に対応する超音波信号を発射し、該発射した超音波信号を前記船に設けた送受波器で受信することで、前記潜水士が携帯するトランスポンダの位置を測定する水中ポジショニングシステムであって、前記トランスポンダに、前記送受波器から発射される特定の超音波信号を受信するとバイブレートするバイブレーション機構16を備えたことである。
(もっと読む)
水中構造物点検システム及び画像処理装置
【課題】水中構造物の点検の作業効率を向上し、コストを抑制できる水中構造物点検システム及び画像処理装置を提供する。
【解決手段】造影された映像において船舶が移動することで生じる歪みを補正するため、当該海域で予め測定された音速と、映像に生じている歪みの大きさとに基づいて船舶の移動速度を推定し、当該推定した移動速度を用いて映像の歪みを補正し、当該補正された映像を出力する。
(もっと読む)
超音波探知システム
【課題】従来のクラゲ探知システムでは1フレームの画像を取得するため非常に時間がかかるので、短時間で観測できる超音波探知システムを提供する。
【解決手段】超音波振動子6aで受信した反射波データをメモリ6dから読み出し、制御回路9の複数個の信号を1つの信号とするグループ化機能でグループ化し、グループ化された信号を上限値ゲート機能に入力して強い反射波をカットし、下限値ゲート機能に入力して弱い反射波をカットし、上限値及び下限値がカットされた出力データを第1の判別機能に入力し、出力データが規定値より多いかどうかが判断され、多ければクラゲと判断され警報信号が出力され、出力データが第2の判別機能に入力され、予め決められた時間以上存在するかどうかが判断され、存在する場合はクラゲと判断されて警報信号が出力され、第1、第2の判別機能の両方から警報信号が出力された場合にのみ、警報機に信号が出力される。
(もっと読む)
水中音波撮像装置
【課題】 底質が既知でない条件下において、臨界俯角による埋没物体の検出ミスを回避し、また高感度な沈底機雷と埋没機雷の判別技術を提供する。
【解決手段】 ソーナーを備えた移動体10が移動し、ソーナーの送信投影面16が移動するにつれて水底11付近の物体を見る俯角が変化し、画像の視野内に物体が存在している間に俯角が臨界俯角12より小さくなると、その物体が水底堆積層に埋没していたら物体からのエコー受信強度が急に低下する現象を利用する。順次得る複数のソーナー画像13−1,13―2,13−3の間で、物体を示す輝度ピークの値または物体からの受信信号強度を追跡し、追跡した値が所定閾値を横切って低下した場合は、その物体は埋没機雷、追跡した値が閾値を横切らない場合は沈底機雷であると判別する。
(もっと読む)
ドップラー計測器および潮流計
【課題】耐ノイズ性能に優れ、かつドップラーシフト量を高精度で計測できるドップラー計測器を提供する。
【解決手段】重心計算区間Wt[1:n]はパワースペクトルPt[fi]のピークを含む区間であり、この区間Wt[1:n]ごとに重心周波数fwt[1:n]が算出される。仮ドップラーシフト量は、パワースペクトルPt[fi]、Pr[fi]の相互相関処理の出力が最大となるときの周波数シフト量である。重心計算区間Wt[1:n]に対応付けられた重心計算区間Wr[1:n]は仮ドップラーシフト量に基づいて決められ、この区間Wr[1:n]ごとにパワースペクトルPr[fi]の重心周波数fwr[1:n]が算出される。重心周波数fwr[1:n]、fwt[1:n]の差に対してドップラーシフトの周波数依存性の補償などが行われてドップラーシフト量fdが求められる。ドップラーシフト量fdによって重心計算区間Wr[1:n]の周波数範囲が補正され、ドップラーシフト量fdは収束するまで繰返し求められる。
(もっと読む)
海底ケーブル移動距離測定システム、装置及び方法
【課題】海底ケーブルの敷設後の位置を測定し、海底ケーブルの移動距離を算出する海底ケーブル移動距離測定システム、装置及び方法を提供すること。
【解決手段】海底ケーブル移動距離測定システム1は、海底ケーブル位置DB32と、超音波発生装置160と、超音波伝達部161と、移動装置111と、移動装置111において左側超音波受信機121Lと、右側超音波受信機121Rとを備える。そして、海底ケーブル移動距離測定システム1において、海底ケーブル移動距離測定装置10は、左側超音波受信機121Lによって受信された超音波の音圧と、右側超音波受信機121Rによって受信された超音波の音圧とが等しくなるように移動装置111を制御し、制御されて移動した移動装置111の位置情報を、GPS衛星141との通信に基づいて取得し、取得した位置情報と、海底ケーブル位置DB32に記憶された位置情報との差を算出する。
(もっと読む)
観測信号処理装置
【課題】観測装置と物標の間に相対速度が有る場合でも、良好なコヒーレント積分を行うことの出来る観測信号処理装置を提供する。
【解決手段】1探査当たり複数回の搬送波で変調されたパルス信号を探査信号として順次送出し、物標で反射された反射信号と、パルス信号の遅延変調パルス信号に基づいて複数の観測値を得、該得られた観測値をコヒーレント積分して積分値を外部に対して出力することの出来る装置であって、観測すべき領域に応じたコヒーレント積分回数を格納するメモリ、観測すべき領域に応じたコヒーレント積分回数分のパルス信号を探査信号として送出する手段、送出されたパルス信号の反射波を補足し観測値として蓄積する手段、概算相対速度を格納するメモリ、物標の概算相対速度に基づいて位相補正量を演算する手段、演算された位相補正量に基づいて、観測値について位相重み付きコヒーレント積分を行って外部に出力する手段から構成される。
(もっと読む)
海底輪郭を測定するための方法と装置
本発明は、船舶に取り付けられている、水中領域に音波信号を方向付けて送出するための送信装置と、船舶に取り付けられている、水中領域内の海底輪郭から反射された音波を受信する少なくとも二つの変換器を備えている受信装置とを用いて、海底輪郭を測定する方法に関する。送信装置によって、相互に異なる複数のN個の所定の周波数を用いて音波信号が水中領域に送出され、海底輪郭から反射された、音波信号の成分が受信装置によって受信される。N個の周波数及び複数のサンプリング時点に関して、位相差も伝播時間も求められる。所定の領域内の行路差の数からデータ密度が求められ、データ密度が最大になる領域が選択される。表面に属する行路差から海底輪郭の入射座標が求められる。更に本発明はこの種の方法を実施する装置に関する。  (もっと読む)
(もっと読む)
海底輪郭を測定するための方法と装置
本発明は、音波信号を方向付けて送出するための送信装置と、海底輪郭から反射された音波を受信する少なくとも二つの変換器を備えている受信装置とを用いて、海底輪郭を測定する方法に関する。海底輪郭までの相互に異なるアスペクト角及び距離を有する所定の位置からの複数のN回の測深でもって音波信号が送出される。複数のサンプリング時点及びN回の測深に関して、変換器の受信信号から、位相差、位相差から生じる行路差、所属の入射角度及び入射座標が求められる。入射座標を含む所定の領域におけるデータ密度が求められる。データ密度が最大になる領域が選択され、海底輪郭を求めるために、前記領域に属する入射座標を使用する。更に本発明はこの種の方法を実施するための装置に関する。  (もっと読む)
(もっと読む)
アクティブ・ソナーシステム
【課題】本発明は、アクティブ・ソナーシステムに関し、特にカーボンナノチューブを利用したアクティブ・ソナーシステムに関するものである。
【解決手段】本発明のアクティブ・ソナーシステムは、少なくとも一つの送信装置と、少なくとも一つの受信装置と、電気キャビネットと、を含む。前記送信装置は、少なくとも一つの送信トランスデューサを含む。前記送信トランスデューサは、少なくとも一つの第一電極と、少なくとも一つの第二電極と、音響素子と、を含む。前記音響素子はカーボンナノチューブ構造体を含む。該カーボンナノチューブ構造体は、前記第一電極及び第二電極に電気的に接続されている。
(もっと読む)
音響反射体
本発明による音響反射体は、コアを取り囲むシェルを含み、このシェルは、シェルの表面に入射した音波をコア内に伝達して集束させ、入射領域の反対側に位置するシェルの領域で反射させて、反射体から反射音響信号を出力することができる。また、シェルはコアを有し、シェルのコアに対する寸法は、シェル壁に入射した音波の一部がシェルに結合し、シェルの円周に沿って誘導され、次に再放射され、反射体から出力された反射音響信号と合わさって強い反射音響信号が出力されるように設定される。コアにおける音波伝達平均速度に対するシェルにおける音波伝達速度の比は、好ましくは2.74〜3.4であり、より好ましくは2.74〜2.86である。水中のパイプラインへの応用や、洗掘の測定及び反射体のアレイにも適用できる。 (もっと読む)
GPS魚群探知装置
【課題】 従来の航法装置では、船が現地点で到達した位置までの過去の海底しか表示しないばかりでなく、不明瞭な地点間だけを線分で連結しているので、深さを目安に進行方向を決定するためには、表示画面からの情報を元に行わなければならなという問題があった。
【解決手段】 GPSアンテナ1にGPS受信器2が接続され、GPS受信機2に位置情報検出部3が接続され、この位置情報検出部3に位置情報メモリ4が接続され、位置情報メモリ4に方位・船速計算部5が接続され、この方位・船速計算部5の出力と地図データ出力部6からの出力は地図深度データ検出部7に入力され、さらに、地図深度テータ検出部7の出力は予想海底画像作成部8に入力され、この予想海底画像作成部8の出力は画像用メモリ9に記憶される。
(もっと読む)
ソナー・システム
【課題】船舶の移動中の操作を容易にし、船舶上の動く歩道からの高解像度画像を提供する船舶搭載可能ソナー・システムを提供すること。
【解決手段】船舶搭載可能な一体化ソナー・システムが提供される。船舶搭載可能な一体化システムは、少なくとも1つの画像ソナー・データ収集装置と、少なくとも1つの画像ソナー・データ収集装置に電気的、かつ取り外し可能に接続された少なくとも1つの処理システムとを含む。ソナー・データ収集装置は、好ましくは、処理システムに音響データを提供し、音響データを利用してソナー画像を生成する。また、システムは、関心のある標的の場所を突き止めるべく、データの正確な地理的に参照のためのデジタルのチルト及びアジマス方向を提供する。
(もっと読む)
水中探知装置及び水中探知画像表示方法
【課題】魚単体の遊泳状況を観測容易にする。
【解決手段】水中探知装置は、水中に送波され、魚で反射した受信信号から単体魚及びその位置を周期的に検出する検出手段(5,6)と、周期的に検出された単体魚及びその位置の情報から、同一の単体魚を関連付ける連結処理部71と、検出された単体魚の受信信号から魚体長を算出する魚体長算出部75と、単体魚の遊泳ベクトルを算出する遊泳ベクトル算出部72と、連結された単体魚について、魚体長に対応した計量マーク92a、及び当該単体魚の遊泳ベクトルに対応した変位マーク92bを対応付け、表示部9に表示される2次元座標上の当該単体魚の検出位置に表示する表示制御部8とを備える。
(もっと読む)
目標運動解析方法、目標運動解析装置およびプログラム
【課題】目標運動解析結果が得られていない場合や目標運動解析結果の精度が悪い場合でも、解析収束を加速させるための観測船の運動パターンを指示し、計算負荷を増加させることなく、予測する観測船の運動パターン数を増加させる。
【解決手段】目標運動解析精度を判定し、目標運動解析結果が得られていない場合や目標運動解析結果の精度が悪い場合には、目標体の観測方位および観測方位変化率のみから解析収束を加速させるための観測船の運動パターンを指示し、目標運動解析結果の精度が良好の場合には、微分を用いた最尤法によりフィッシャー情報行列が最大となる観測船の運動パターンを算出する。
(もっと読む)
目標捜索信号生成方法および目標捜索装置
【課題】目標が目標捜索信号と同一方向へ移動する速度成分を持つ場合であっても、探知性能や距離分解能の劣化がないレーダ装置等の目標捜索装置を提供する。
【解決手段】一方向の目標の捜索にチヤープ変調された複数のパルスを送信するレーダ信号を生成する際に、パルス幅と距離分解能との一方または両方を{Pw(i)・Dr(i)=Pw(1)・Dr(1)±Ti・(λ/2)}の関係が該複数のパルス相互において保たれるようにし、目標がレーダ信号と同一方向へ移動する速度成分を有することによる受信信号のドップラーシフトを補償して、各受信信号の圧縮される時間位置を同一にする。ここに、Pw(1)、Pw(i):第1、第i番目の送信パルスのパルス幅、Dr(1)、Dr(i):第1、第i番目の送信パルスの距離分解能、Ti:第1番目の送信パルスと第i番目の送信パルスとの時間間隔、λ:送信電波の波長。
(もっと読む)
合成開口ソーナー、合成開口ソーナーの位相誤差補正方法及びプログラム
【課題】高い精度で位相誤差を検出、補正することを可能とする合成開口ソーナー、合成開口ソーナーの位相誤差補正方法及びプログラムを提供する。
【解決手段】ストリップマップモードの合成開口ソーナーの位相誤差補正に関し、DPCA(Displaced Phase Center Antenna)等により空間的に位相中心をオーバーラップさせた送受信による受信信号から合成開口画像を生成する第1のステップと、合成開口画像の高いレベルのレンジビンのアジマスデータに対応する空間サンプルから位相誤差勾配の推定値を生成する第2のステップと、前記位相誤差勾配の推定値に基づいて前記空間サンプルの位相を補正する第3のステップと、を含むことを特徴とする。
(もっと読む)
音響計測用観測船及び音響計測システム
【課題】河川、湖沼、沿岸海洋、ダム等における浅瀬の測深、河床地形や水中構造物の三次元情報の取得や、河床底質情報の取得等を行うことのできる音響計測用観測船及びこの観測船を利用した音響計測システムを提供する。
【解決手段】浅瀬21を航行可能な船体1に支持フレーム2を設置し、これに支柱部材8a、8bを水平軸の回りに回転可能とするように支持して、支柱部材8a、8bを船体の外周側における直立状態から支持フレーム2上の倒伏状態に回転操作可能に構成し、支柱部材8a、8bには、下側にサイドスキャンソナー12を支持可能とすると共に、上側にはGPS測位装置10、トータルステーション11用の反射体9、三次元位置センサ13を支持可能とし、船体にサイドスキャンソナー12、GPS測位装置10、三次元位置センサ13のデータを記録する記録装置17を設置した音響計測用観測船と、それを利用した音響計測システムを提案する。
(もっと読む)
1 - 20 / 61
[ Back to top ]