
国際特許分類[B65G43/00]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | 制御,例.安全,警報,調整装置 (526)
国際特許分類[B65G43/00]の下位に属する分類
荷運搬器の物理的危険状態の検出,例.過熱状態の場合の駆動停止 (106)
駆動要素と荷運搬器との間のスリップの検出,例.駆動停止用 (5)
駆動要素の破損の場合の駆動停止;ゆるんだ荷運搬器の制動または停止 (1)
供給され,運搬され,または,排出される物品または,物質によりコントロールされる制御装置 (219)
組み合わされて操作されるコンベヤのシーケンス制御 (17)
国際特許分類[B65G43/00]に分類される特許
91 - 100 / 178
物品検査装置
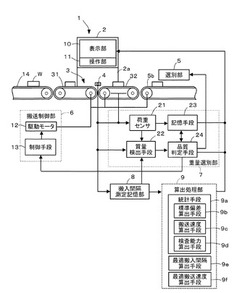
【課題】最適な搬送速度または検査能力の限界に対する稼動中の検査能力の余裕の度合いを搬入間隔から求めることができる物品検査装置を提供する。
【解決手段】搬送部3と、搬入センサ4と、搬入センサ4によって搬送部3に被検査物Wが搬入されたことが検出されてから基準時間経過後に搬送部3に搬入された被検査物Wの品質データを取得する品質データ取得手段と、品質データ取得手段により取得した品質データに基づいて被検査物Wの品質の良否を判定する品質判定手段24と、を備えた物品検査装置において、搬入センサ4によって検出された被検査物Wの搬入間隔を測定し記憶する搬入間隔測定記憶部8と、搬入間隔測定記憶部8によって測定し記憶された搬入間隔の内の所定範囲内の搬入間隔に関する統計量を算出する統計手段9aとを備える。
(もっと読む)
自動荷役車両およびその制御方法

【課題】安価な構成で、荷役対象物の停止位置を調整することが可能な自動荷役車両およびその制御方法を提供する。
【解決手段】CPUは、最初に搬送モータを駆動する。次に、CPUは、光電センサから与えられる検出信号に基づいて、荷役対象物の通過時間tを計測する。次いで、CPUは、荷役対象物の長さXを算出する。すなわち、CPUは、上記の通過時間tと搬送速度Vとの積により、荷役対象物の長さXを算出する。次に、CPUは、(Y−X)/2Vにより停止時間Tを算出する。なお、Yは車両本体部の本体部長さである。上記の停止時間Tとは、荷役対象物の一端部が光電センサを通過したときから、複数のローラーを停止させるまでの時間である。次いで、CPUは、停止時間Tが経過した後に搬送モータを停止させる。
(もっと読む)
コンベヤベルトのローラ乗り越え抵抗力測定装置
【課題】コンベヤの設置現場での測定が可能であるとともに、複数方向に対する測定データを得ることのできるコンベヤベルトのローラ乗り越え抵抗力測定装置を提供する。
【解決手段】測定用ローラ11の支軸11bの両端と支持部材12の各支持壁12aとの間に設けた検出器13により、測定用ローラ11上を移動するコンベヤベルトAから測定用ローラ11に加わる力を検出するようにしたので、測定用ローラ11の支軸11bを介して検出した力をローラ乗り越え抵抗力として測定することができる。これにより、支持部材12に取付けられた測定用ローラ11を現場のベルトコンベヤに容易に設置することができる。また、等速自在継手11cを介して連結された各測定用ローラ11が互いに一体に回転することから、検出器13を各測定用ローラ11ごとに設ける必要がなく、装置全体がコンベヤベルトの幅方向に大型化することがない。
(もっと読む)
パーツフィーダの除電装置および方法
【課題】軽量粒状物としてのワークWを効果的に除電し得るパーツフィーダの除電装置および方法を提供すること。
【解決手段】粒状のワークWを所定経路に沿って搬送するインラインフィーダIF、および供給された前記ワークを少量ずつ連続的に前記インラインフィーダの所定個所に対して落とし込む回転ドラムDを有するパーツフィーダにおけるワークの帯電を除去するパーツフィーダの除電装置において、前記回転ドラムにおける前記インラインフィーダの所定位置近傍に設けられた+電極と−電極とを含む少なくとも一対の電極E1,E2と、直流高電圧電源Pと、前記電源から給電されて極性高電圧を形成し、前記+電極に正の、また前記−電極に負の電圧を印加する極性電圧形成回路とをそなえたことを特徴とするパーツフィーダの除電装置、および方法。
(もっと読む)
搬送装置
【課題】本発明は、加工ラインの変更に容易に対応が可能且つ、粉塵等の影響を受けることがない上に直線的な通信に限定されない通信手段を有し、更に外部装置によるシステム管理並びに制御を安価な構成によって可能とした搬送装置を提供することを目的とする。
【解決手段】本発明は、前記した課題を解決する手段として、固定部と固定部に配設された走行レールと、モータとコントロールボックスを搭載し、電力供給をトロリ−ユニットにて行う走行部と、走行部に取り付けられたローディング装置部と、他の装置との同調した動作を行う為の制御盤より構成し、走行部に搭載したコントロールボックスと制御盤との通信に電力線通信を用いた装置構成とし、更に制御盤と外部装置間においても電力線通信が可能な装置構成とする。
(もっと読む)
パッケージ搬送システム
【課題】停止位置検知センサの上流側に新たなセンサを設け、当該センサから信号を受けたコンベア駆動制御部が当該信号により搬送コンベアの搬送速度を変速することで、パッケージ回収の作業効率を良くする。
【解決手段】糸巻取りユニットから排出されるパッケージを所定停止位置まで搬送するパッケージ搬送システムであって、パッケージを搬送する搬送コンベアと、搬送コンベアの搬送経路上の減速開始位置から停止位置までの範囲でパッケージの存在を検知する範囲検知センサと、搬送コンベアの駆動を制御するコンベア駆動制御部とを具備し、範囲検知センサがパッケージを検知しない場合はコンベア駆動制御部が搬送コンベアの搬送速度を通常搬送時の速度より加速するように制御し、加速制御を行った後範囲検知センサがパッケージを検知した場合はコンベア駆動制御部が加速した搬送速度を通常搬送時の速度まで減速するように制御する。
(もっと読む)
昇降式の物品搬送装置
【課題】搬送効率が高いものでありながら、物品の移載を適切に行うことができる昇降式の物品搬送装置を提供すること。
【解決手段】制御手段(H)が、物品移載用の適正移載高さに対応する移載装置の目標昇降位置情報を記憶するように構成されて、昇降位置検出手段(17)の検出情報及び記憶した目標昇降位置情報に基づいて、移載装置を適正移載高さに昇降させるべく、昇降駆動手段(13)の作動を制御する昇降制御処理、並びに、移載装置を適正移載高さに昇降させた後に、ビーム検出手段(BS)の検出情報に基づいて、移載装置が適正移載高さに対応して定めた許容昇降範囲内に位置するか否かを判別する停止位置確認処理を実行するように構成されている昇降式の物品搬送装置。
(もっと読む)
傾斜又は垂直コンベアの逸走防止装置
【課題】ハンガーを暴走後に停止させる際の衝撃を緩和して、逸走防止装置の小型軽量化及び低コスト化を図る。
【解決手段】コンベアにより移動するハンガーの下流側面に当接して係止するドッグが設けられた無端状チェーン11、無端状チェーン11が係合する駆動スプロケット8及び従動スプロケット、駆動スプロケット8を駆動するギヤドモータ13、ハンガーの暴走時に無端状チェーン11を停止させる制動装置、並びに、ハンガーの暴走を検知する暴走検知装置を有する逸走防止装置であって、ギヤドモータ13の出力軸14と駆動スプロケット8との間にトルクリミッタ5を設け、トルクリミッタ5の回転伝達トルクの限界値を、制動装置による制動トルクよりも小さく設定した。トルクリミッタ5により前記回転伝達トルクの限界値を超えるトルクが遮断されるため、ハンガーを暴走後に停止させる際の衝撃が緩和される。
(もっと読む)
ワーク搬送装置
【課題】各工程における作業者による作業環境に合わせて、必要に応じてコンベアを移動させて、組付ラインの長さや配置などを容易に調整することができるワーク搬送装置を提供する。
【解決手段】複数の異なる姿勢でワークを支持するワーク支持台2と、複数のワーク支持台2を搬送方向Xに並べた状態で搬送するコンベア3とを備えるワーク搬送装置1であり、前記コンベア3は、搬送のための動力を供給する駆動モータ23を有する複数の駆動コンベアユニット4と、この駆動コンベアユニット4の間に間欠的に配置されてワーク支持台2を搬送方向Xに移動自在とするフリーコンベアユニット5とを組み合わせたものである。
(もっと読む)
搬送コンベヤ
【課題】被搬送物の全長より短い全長の搬送体を用いて被搬送物をストレージ搬送させる際の被搬送物同士の衝突を駆動制御回路に係わらず簡便かつ確実に防止できるとともに保守メンテナンス作業などに際して逆走を簡便に達成できる搬送コンベヤを提供する。
【解決手段】衝突防止機構130が、先行走行する搬送体110とコンベヤ軌道上で接触して沈下する感知ローラ131と、この感知ローラ131を一端に回転自在に軸支するとともに感知ローラ131の浮沈動作に応じて揺動する感知レバー132と、この感知レバー132の揺動する他端に一端を連結した連結ロッド133と、この連結ロッド133の他端に一端を連結させて前記感知ローラ131が先行走行する搬送体110と接触したとき後続走行してくる搬送体110をコンベヤ軌道上で隆起して所定のストレージ搬送間隔Lsに走行規制するストッパーレバー134とを備えている搬送コンベヤ。
(もっと読む)
91 - 100 / 178
[ Back to top ]