
国際特許分類[B65G47/30]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | コンベヤに関連して物品または物質の取り扱い装置;そのような装置を用いる方法 (3,876) | コンベヤによって移送中物品の相対的位置または姿勢を変える装置 (851) | 物品を整列させるもの,例.個々の物品間の間隔を変えるもの (568) | 一連のコンベヤによる移送中に行うもの (328)
国際特許分類[B65G47/30]の下位に属する分類
一連のコンベヤの相対速度を変えることによって行うもの (86)
移送装置の適用 (2)
国際特許分類[B65G47/30]に分類される特許
161 - 170 / 240
フィン整列装置
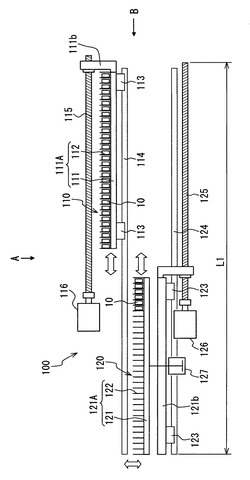
【課題】構成の簡略化を図り、小型化が可能となるフィン整列装置を提供する。
【解決手段】前工程で成形されるフィン10を整列させるフィン整列装置において、フィン10を並列に複数本収容して整列させると共に、フィン10の並ぶ方向に摺動可能な第1フィン整列部110と、第1フィン整列部110の下側に設けられ、フィン10を並列に複数本収容して整列させると共に、フィン10の並ぶ方向に摺動可能な第2フィン整列部120と、順次成形されるフィン10を第1、第2フィン整列部110、120に複数本ずつ交互に切替え投入するフィン投入切替え部130とを設ける。
(もっと読む)
自動系外排出・供給搬送システム

【課題】 障害発生時に上流ラインの稼動を止めることなく製品を一時保管自動倉庫に収納し、障害が回復した際に自動倉庫から出庫して最終梱包ラインに供給する、バンド掛け状態の製品またはピロー包装された製品の自動系外排出・供給搬送システムを提供する。
【解決手段】 排出製品整列ストッパ機構10と、製品移載機構20と、トレー保持交換・ポケット内整列機構30と、トレー移載機構40と、を少なくとも備え、バンド掛け状態の製品またはピロー包装された製品が供給ベルトコンベア11に載って下流側梱包ラインに送られているときに、その梱包ラインに障害があり停止した場合或は停止させた場合、上流側工程ラインを停止させないで、送られてくる供給ベルトコンベア上の製品を、一時的にライン系外にストックする自動系外排出と、一時的にストックされた製品を供給ベルトコンベアに戻して下流梱包ラインに供給する自動系外排出・供給搬送システム。
(もっと読む)
分離装置
【課題】トレーと食器とを適切に分離できる分離装置を提供する。
【解決手段】分離装置1は、水平姿勢のトレー3を搬送する水平搬送手段5と、傾斜姿勢のトレー3を搬送する傾斜搬送手段6とを備える。分離装置1は、傾斜搬送手段6の搬送始端側の位置で傾斜姿勢のトレー3の下端部を支持する支持手段7を備える。分離装置1は、傾斜搬送手段6の搬送終端側の位置で支持手段7から離れて下端部が非支持状態となる傾斜姿勢のトレー3の上端部を傾斜搬送手段6とともに挟持する挟持手段8を備える。傾斜搬送手段6の搬送始端側の位置では、トレー3が水平姿勢から傾斜姿勢になることによって食器2がトレー3上から滑り落る。傾斜搬送手段6の搬送終端側の位置では、傾斜姿勢のトレー3の下端部が非支持状態となることによって、支持手段7に引っ掛っていた食器2がトレー3上から滑り落ちる。
(もっと読む)
搬送物姿勢制御装置及び制御方法
【課題】搬送物の間隔が狭くかつ高速搬送においてもその搬送物の姿勢を自在に変更でき、また搬送物ごとの仕分け方向に迅速に対応できる搬送物姿勢制御装置を提供する。
【解決手段】個別に制御可能な複数のセルを平面状に配置した搬送物の姿勢制御装置であって、前記各セル5には1対の搬送ローラ6間に架けられたベルト8を回転させるベルト駆動手段と、前記各セルを、水平方向に首振り回転させる首振り駆動手段と、前記各セルのベルトの前方又は後方の少なくとも1方に搬送物を検知するセンサ9とを備え、前記センサの検知出力に応じて、前記ベルト駆動手段と首振り駆動手段とを独立して制御可能に構成したことを特徴とする。
(もっと読む)
首振りセル装置及びその制御方法
【課題】搬送物の間隔が狭くかつ高速搬送においてもその搬送物の姿勢を自在に変更でき、また搬送物ごとの仕分け方向に迅速に対応できる首振りセル装置を提供する。
【解決手段】搬送物(10)を載置可能なベルト(8)が架け渡された一対の搬送ローラ(6)を駆動するベルト駆動手段と、前記ベルトを搬送物の載置面に沿った水平方向に回転させる水平駆動手段と、前記ベルトの搬送物が搬送される上流側若しくは下流側の少なくとも1方に配置された物品感知センサ(9)とを備え、前記物品感知センサの検出出力に応じて、前記ベルト駆動手段及び水平駆動手段を個別に制御することを特徴とする。
(もっと読む)
円形ワーク送出装置
【課題】摩擦係数が大きく、詰まりを生じ易いゴム製の円形ワークを、ズムーズに、かつ、一定送出ピッチにて、送り出して、検査装置等に送ることを目的とする。
【解決手段】ゴム等の弾性材の円形ワークWをパーツ供給手段101 から受け取ってパーツ移送手段102 に送り出す送出装置に於けるものである。ラジアル外方向に開口する凹周溝5を有する回転円盤6と、回転円盤6の凹周溝5を略閉じるように配設した円弧状の外周ガイド部材16とを、具備する。さらに、外周ガイド部材16の下流寄りにて凹周溝5内の円形ワークWを回転円盤6のラジアル方向へ押圧して円形ワークWを自転させつつ回転円盤6の周端縁部の周速R6 の約2分の1の送り速度Vに減速して1個ずつ送り出すワークころがし手段19を備えたものである。
(もっと読む)
可搬物体の加工処理用線形機械および可搬物体の加工処理方法
可搬物体を加工処理する方法、および、可搬物体を加工するための機械であって、集積回路が組み込まれている可搬物体(C)を搬送する装置(1)と、可搬物体(C)1つ分の大きさの間隔だけ離され、駆動および位置決め手段によって、前記可搬物体(C)の主平面に垂直方向に、案内支持機構(25)上で順次平行移動する少なくとも2つの加工処理リフト(2、2’)から構成される加工処理手段とを備える機械であり、各リフト(2、2’)が、少なくとも2つの加工処理装置を備える平行六面体板構造物(22)を用いて形成され、両リフトが所定の異なる役割を有する機械を提供する。方法は、加工処理すべき各可搬物体を第1のリフトおよび第2のリフトの加工処理ステーションに順次載置するステップを含む。 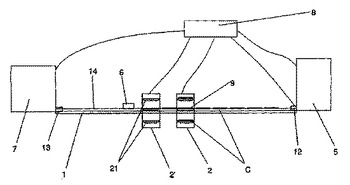 (もっと読む)
(もっと読む)
幅寄せコンベア及び整列装置
【課題】搬送直交方向に所定の間隔を空けて進入する一組の農産物を迅速に幅寄せできる幅寄せコンベアを提供する。
【解決手段】 搬送直交方向に所定の間隔を空けて進入する一組の農産物を幅寄せする幅寄せコンベア(4)であって、搬送方向左側に配置される第1のローラ群(42)と右側に配置される第2のローラ群(41)とを有し、前記第1及び第2のローラ群を構成する各ローラの回転軸は、コンベア側方側に向かって搬送方向下流に傾斜していることを特徴とする幅寄せコンベア。
(もっと読む)
搬送システム
【課題】コンベア上を滑らせずに、搬送位置を修正することができる搬送システムを提供する。
【解決手段】第1コンベア101に載せられたパン生地Dは第2コンベア102に載せられ、第2コンベア102上において、カメラ113により撮影される。撮影された画像は制御装置114に送信され、制御装置114において、第1コンベア角度変更装置111及び第3コンベア移動装置112に、指令を行う。第1コンベア角度変更装置111は、指令された角度αだけ第1コンベアを動かし、第3コンベア移動装置112は、パン生地Dが第3コンベア103に載せられたタイミングで、第3コンベア103を、ずれの方向とは逆方向に幅方向ずれだけ移動する。したがって、第4コンベアでは幅方向略中央に載せられることとなる。
(もっと読む)
アキュームレーターおよびパレタイザー
【課題】飲料用ボトルのキャップ等の小物物品をスムーズに整列配置できるアキュームレーターを提供する。
【解決手段】搬送手段により供給される複数の物品Wを搬路11上に一時滞留しておくアキュームレーターであって、搬路下流端部に設けられ、この搬路11上に滞留する物品Wを進退させて平面状に整列させる整列機構12を備える。整列機構12は、搬路11の幅方向に設けられて、その中央部を支点として搬路方向に揺動可能な可動部材13を備え、可動部材13の揺動にて、物品Wを進退させる。
(もっと読む)
161 - 170 / 240
[ Back to top ]