
国際特許分類[B66C13/22]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | クレーン;クレーン,キヤプスタン,ウインチまたはタツクル用の荷物係合要素または装置 (4,090) | 他の構造上の特徴または細部 (1,024) | 制御方式または制御装置 (466) | 電気駆動用のもの (204)
国際特許分類[B66C13/22]の下位に属する分類
荷物の降下制御用の回路 (34)
ブレーキ用モータ,横行用モータまたは旋回用モータのための回路 (6)
荷物のもち上げ,下げ用およびバケツトあごの開閉用の両方に使用するところの1個またはそれ以上の電動機装置によりグラブバケツトのもち上げ操作をするためのもの (15)
国際特許分類[B66C13/22]に分類される特許
11 - 20 / 149
クレーン装置用電源装置
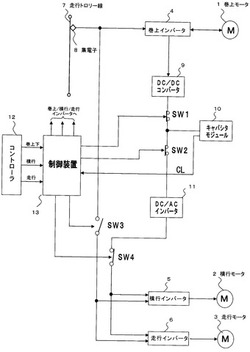
【課題】荷巻下時の回生電力をキャパシタに蓄電し、横行・走行時の電力として有効利用可能なクレーン装置用電源装置を提供する。
【解決手段】巻上用電動機1、横行用電動機2及び走行用電動機3に、商用電源からの交流電力を電動機毎に設けたインバータ4,5,6で駆動用交流電力に変換して供給するクレーン装置用電源装置において、巻上用電動機1が巻下時に発生しインバータを介して取り出される回生電力を蓄電するキャパシタ10と、キャパシタ10に蓄電された直流電力を交流電力に変換するコンバータ11と、横行用及び走行用インバータ5,6にコンバータ11からの交流電力を商用電力と切り換えて供給する切換回路SW3,SW4と、キャパシタ10の蓄電量が放電可能閾値を超えた時にコンバータ11からの交流電力が横行用インバータ5及び走行用インバータ6に供給されるように前記切換回路を切り換え制御する制御装置13とを備える。
(もっと読む)
荷役システム

【課題】設備費用を抑えかつ作業の迅速性を考慮しつつ省エネルギー化を図ること。
【解決手段】制御装置16の判定部161bが、荷役計画情報に基づき、管理装置30から指示された荷役作業が迅速性を要しない作業であるか否かを判定し、動作制御部161cが、荷役作業が迅速性を要しない作業であると判定部161bによって判定された場合に、ヤードクレーン1a,1bが協働して力行動作および回生動作を行うように各ヤードクレーン1a,1bの動作を制御する。
(もっと読む)
クレーン装置
【課題】バースバーとの距離をレーザ距離センサで正確に検出する。
【解決手段】コンテナヤード内のレーンに沿って延設されたバスバー8からの給電電力で電動機30,31,32を駆動することにより、コンテナヤード内の任意のレーンでコンテナの巻上げ下げを行う門型のクレーン装置であって、バスバー8に立設されて反射面に防食塗装が施された帯板状の反射板8Bに対し、レーザ光L1を出射してその反射光L2を受光することにより、反射板8Bまでの距離を検出するレーザ距離センサ2Sを備え、レーザ距離センサ2Sからレーザ光L1を出射する方向を、反射面と垂直な方向に対して角度を有し、かつ反射光L2の一部をレーザ距離センサ2Sで受光しうる方向とする。
(もっと読む)
クレーンの制御方法
【課題】スプレッダを巻下ろしてコンテナに接近させる際に、スプレッダとコンテナの衝突を防止し、且つ、短時間でスプレッダとコンテナの接触を実現したクレーンの制御方法を提供する。
【解決手段】主巻ワイヤロープに吊られたスプレッダと、スプレッダと海上用輸送コンテナの間の距離を計測する距離計測センサを有するクレーン1の制御方法において、センサでスプレッダとコンテナ間の距離Lxを計測する距離計測ステップと、距離Lx及びスプレッダのブレーキ時の加速度から上限速度Vxを算出する算出ステップと、スプレッダ7の移動速度を上限速度Vxに制御する減速ステップを有する。
(もっと読む)
クレーンの制御方法及びその制御装置
【課題】
クレーンによるコンテナの荷役の際に、主巻ワイヤロープにコンテナの荷重がかかる瞬間に発生するロープの跳ね上げを抑制し、機械室等への損傷を低減し、かつ、荷役速度が上昇するクレーンの制御方法及びその制御装置を提供する。
【解決手段】
主巻ワイヤロープ10を、スプレッダ7に設置した速度制限手段13の作用により制限されている制限速度で巻き取り、コンテナ4を荷揚げするクレーン1の制御方法において、コンテナ4の荷揚げ作業が、主巻ワイヤロープ10のたるみを、制限速度V0より速い第1速度V1で巻き取るたるみ取り工程と、主巻ワイヤロープ10を制限速度V0より遅い第2速度V2で巻き取るロープ緊張工程を有する。
(もっと読む)
クレーン
【課題】レール上を走行する荷役装置(トロリ)を有するクレーンにおいて、レール上でのトロリの蛇行を抑制し、トロリの車輪のつばとレールの接触(つばぜり)による摩耗、吊り荷の揺れ、及び騒音の発生を抑制したクレーンを提供する。
【解決手段】レール3と、レール3上を走行する荷役装置2を有するクレーンにおいて、荷役装置2が、レール3に対する荷役装置2の傾きを検出する姿勢検出センサ20と、荷役装置2の有する各車輪10の回転数を制御する制御装置を有しており、姿勢検出センサ20が、レール3に対する荷役装置2の傾きを検知し、荷役装置2の傾きに基づき各車輪10の回転数を制御する。
(もっと読む)
クレーンの振れ止め制御方法及び振れ止め制御装置
【課題】吊り荷を支持するロープ長が変化する場合でも、比較的簡単な演算により所定の速度パターンを生成して吊り荷の振れ止めを行う。トロリーの目標位置と移動量との位置偏差が減速開始距離に等しくなった時点からトロリーの減速を開始し、高精度な位置決めを可能にする。
【解決手段】トロリーが移動する際の吊り荷の振れ角に関する運動方程式に基づいてトロリーの加減速時の速度パターンを求め、この速度パターンに従ってトロリーを駆動することにより吊り荷の振れ止めを行う制御方法に関する。前記運動方程式をトロリー加速度について解くことにより数式2に示す加減速度を求め、この加減速度に応じた速度パターンに従ってトロリーを駆動し、トロリーの加減速が終了した時点の吊り荷の振れ角が零となるように制御する。
(もっと読む)
洋上荷役システム及びこれを備えた洋上浮遊体
【課題】吊荷の上下動や揺動および定常的な傾きを抑制することが可能な洋上荷役システムを提供する。
【解決手段】同一の洋上浮遊体2に取付けられる複数のウィンチ等の荷役機構W1〜W4と、それらより引き出され吊荷52を協働して懸架するワイヤロープ511〜514と、それらの引き出し量を変化させ吊荷52を下降または上昇させるように荷役機構W1〜W4を制御する制御手段6とを具備する洋上荷役システムであって、制御手段6が、洋上浮遊体2または吊荷52に設けられる揺動検出部621と、吊荷52の揺動を抑制するための各ワイヤロープ511〜514の引き出し量補正値V11〜V12を揺動検出部621からの検出値に基づいて出力する揺動補正指令部82とを備え、揺動補正指令部82からの出力値をフィードバックして荷役機構W1〜W4の制御を行うよう構成した。
(もっと読む)
洋上荷役システム及びこれを備えた洋上浮遊体
【課題】吊荷の水中高度を精度良く維持しつつ上下動を抑制することが可能な洋上荷役システムを提供する。
【解決手段】洋上浮遊体に取付けられるウィンチ等の荷役機構W1と、荷役機構W1より引き出され吊荷52を懸架するワイヤロープ511と、ワイヤロープ511の引き出し量を変化させ吊荷52を下降または上昇させるように荷役機構W1を制御する制御手段6とを具備するものであって、制御手段6が、吊荷52に設けられる海底31との距離を測る水中高度検出部651と、吊荷52の水中高度Hを制御するためのワイヤロープ511の引き出し量補正値を水中高度検出部651からの検出値に基づいて出力する高度補正指令部88とを備え、高度補正指令部88からの出力値をフィードバックして荷役機構W1の制御を行うように構成した。
(もっと読む)
在荷認識装置
【課題】夜間など周囲が暗い状況においてもターゲットの誤認識を低下させ、パレット上に荷が載置されているか否かを高精度に認識することができる在荷認識装置を提供する。
【解決手段】荷を吊上げ搬送する吊上げ搬送手段3に搭載された撮像手段5と、荷を載置可能な複数のパレット1と、パレットに設けられており、荷を載置すると隠れて撮像手段による上方からの撮像が不可能となる被撮像部2と、撮像手段から入力した所定のパレットの撮像信号に基づいて被撮像部2の有無を確認し、所定のパレットへの荷の在荷を認識する認識部6とを備えた在荷認識装置である。被撮像部2は、明色からなる所定形状のターゲット2aと、このターゲット2aの周囲を囲んで設けられている暗色のターゲット周囲部2bとで構成されている。
(もっと読む)
11 - 20 / 149
[ Back to top ]