
国際特許分類[B66C13/22]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | クレーン;クレーン,キヤプスタン,ウインチまたはタツクル用の荷物係合要素または装置 (4,090) | 他の構造上の特徴または細部 (1,024) | 制御方式または制御装置 (466) | 電気駆動用のもの (204)
国際特許分類[B66C13/22]の下位に属する分類
荷物の降下制御用の回路 (34)
ブレーキ用モータ,横行用モータまたは旋回用モータのための回路 (6)
荷物のもち上げ,下げ用およびバケツトあごの開閉用の両方に使用するところの1個またはそれ以上の電動機装置によりグラブバケツトのもち上げ操作をするためのもの (15)
国際特許分類[B66C13/22]に分類される特許
21 - 30 / 149
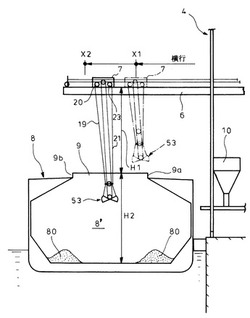
ロープトロリ式アンローダのバケット位置決め方法
【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時には横行方向後方の巻上げロープを巻き込むことによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出してグラブバケット53をトロリ7が走行して来た方向の前方へ振り出させて槽8'内へ着地させることにより、槽口9直下よりも前後外側奥部のバラ物80を陸揚げ可能にした。
(もっと読む)
グラブバケット式アンローダのバラ物陸揚げ方法

【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時は、横行方向前方の巻上げロープの巻き込みと横行方向後方の巻上げロープの繰り出しを同期させ、且つ横行方向後方の巻上げロープの繰り出しを遅らせることによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出すことによりグラブバケット53を前方へ振り出させるようにし、バラ物を掴んだグラブバケット53は、前方への振り出しと同時に開放を行ってバラ物をホッパ10内へ投入する。
(もっと読む)
ロープトロリ式アンローダのバケット振れ止め装置
【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、張力検出手段からの第1巻上ロープ19及び第2巻上ロープの張力検出値とトロリの横行速度検出手段からのトロリ横行速度とグラブバケットの吊り長さ検出手段からの吊り長さとを入力し、トロリの横行起動時には横行方向前側の巻上ロープの張力が横行方向後側の巻上ロープの張力に対して大きくなるように第1巻上ドラムと第2巻上ドラムの回転を制御し、トロリの横行停止時には横行方向後側の巻上ロープの張力が横行方向前側の巻上ロープの張力に対して大きくなるように第1巻上ドラムと第2巻上ドラムの回転を制御してグラブバケットをトロリの直下に位置させる制御器を備える。
(もっと読む)
置場管理システム
【課題】簡素な構成によって形鋼製品の置場を容易、且つ、正確に管理すること。
【解決手段】作業者側端末装置13が、形鋼製品1に付与されている形鋼側バーコード5の製品IDと形鋼製品1が収容されているラック4a〜4dに付与されているラック側バーコード6a〜6dの置場IDとを読み取り、読み取られた製品IDと置場IDとを管理サーバ装置30に送信し、管理サーバ装置30が、受信した製品IDと置場IDとを置場管理マスタに自動登録する。これにより、簡素な構成によって形鋼製品1の置場を容易、且つ、正確に管理することができる。
(もっと読む)
クレーン振れ角検出方法及び装置、並びにクレーン振れ止め制御方法及び装置
【課題】振れ角検出器及び複雑な演算が不要で安価にクレーンの振れ角を検出し、各種パラメータ調整が容易で高精度に振れ止め制御を行う。
【解決手段】クレーン制御装置は、トロリーを駆動する走行モータの駆動力を制御装置に入力し、制御装置が所定の状態方程式から求められたオブザーバに基づいて、ロープの振れ速度推定値、振れ位置推定値及び外乱推定値を求める。制御装置が走行モータの速度操作指令信号を出力し、レギュレータにより速度操作指令信号からトロリーの速度、振れ速度推定値及び振れ位置推定値をそれぞれ調整した値を減算することによりトロリーの目標駆動力を求め、これを走行モータのトルク操作指令信号に変換すると共に、この信号から、外乱推定値から求められたトルク成分をキャンセルして走行モータのトルク指令信号を算出しこれによって走行モータをトルク制御する。
(もっと読む)
荷役用クレーンの走行位置制御装置
【課題】荷役用クレーンの走行位置をコンテナに的確且つ速やかに一致させると共に、手間やコスト増を抑制するる。
【解決手段】走行レール上を走行し、その走行方向に隙間を空けて並べられた複数コンテナ3のうち対象コンテナの中心位置に、走行位置を合わせてコンテナを荷役する荷役用クレーンの走行位置制御装置において、走行方向について荷役用クレーンと同期して移動し、走査角度範囲内16に複数コンテナ3が含まれるように取り付けられ、走査角度ごとにコンテナ表面までの距離を計測する走査型の距離計10を備える。計測された距離とその走査角度18とを関連付けた測定データを記憶する。記憶された複数の測定データに基づいて対象コンテナの中心位置と荷役用クレーンの位置との走行方向に関する相対距離を算出する。相対距離を零に近づけるように荷役用クレーンを走行させる。
(もっと読む)
移載システム
【課題】横移載時にも被搬送物を載置台の所定位置に移載する。
【解決手段】移載システム(100)は、天井に敷設された軌道(1)に沿って走行しつつ被搬送物(3)を搬送する搬送車(2)と、軌道より下方に設けられる載置台(4)との間で被搬送物が横移載方式で移載可能である。移載システムは、(i)搬送車に把持される被搬送物を載置台の所定位置に載置する載置動作を行う際の被搬送物の移載位置を表す載置位置情報、及び(ii)載置台上の被搬送物を搬送車が把持する把持動作を行う際の被搬送物の移載位置を表す把持位置情報を記憶する記憶手段(101)と、載置動作を行う場合、載置位置情報の移載位置で移載が行われるように、他方、把持動作を行う場合、把持位置情報の移載位置で移載が行われるように搬送車を制御する制御手段(102)とを備える。
(もっと読む)
クレーンの振れ止め制御装置
【課題】二重振り子構造、単振り子構造を含むクレーン搬送システムにおいて、速度パターンを持たずに、吊り荷の振れ止めを高精度に実現可能としたクレーンの振れ止め制御装置を提供する。
【解決手段】吊り荷及びその支持構造が単振り子構造または多重振り子構造を構成し、クレーン本体の台車を駆動して吊り荷を目標位置まで搬送するクレーン搬送システムにおいて、吊り荷503の振動による振れ角度を検出する振れ角センサ512と、吊り荷の速度検出値及び位置検出値をフィードバックして吊り荷を目標位置まで搬送するための第1の操作量を演算し、かつ、前記振れ角度を無線通信によりフィードバックして吊り荷の振れ止めを行うための第2の操作量を演算する演算制御手段としてのアシスト制御部101と、第1の操作量及び第2の操作量を加算して前記台車に与える手段と、を備える。
(もっと読む)
低揺動洋上荷役システム又はこれを備えた洋上浮遊体
【課題】洋上において荷役機構の上下動に起因した吊荷等の負荷の揺動を抑制しその位置を一定に保つ揺動制御を行うにあたり、より小型で高効率の低揺動洋上荷役システムを新たに提供する。
【解決手段】揺動制御を行うための構成を備えたものにおいて、発電機5からインバータ7に向かう給電ライン11の一部に直流電力を備蓄する蓄電部13を接続して、揺動制御における回生時に電動モータ9から回生エネルギを蓄え、蓄えたエネルを力行時に電動モータ9に供給し得るようにした。
(もっと読む)
クレーンの制御方法
【課題】吊荷のロープの長さを変動する場合における吊荷の残留振動をより効果的に抑制することのできるクレーンの制御方法を提供する。
【解決手段】
加速区間、等角速度区間、減速区間の順で旋回させる運搬過程を有し、当該運搬過程において、前記運搬開始位置から前記目標位置までに要する運搬時間の1/2の時刻で対称(折り返した場合に等しくなる対称関係)となるように座標変換を行うと共に、前記ワイヤの長さの変動および前記吊荷の昇降速度の変化に応じて算出される旋回加速、減速パターンに基づいて、旋回速度の加減速制御を行う。
(もっと読む)
21 - 30 / 149
[ Back to top ]