
国際特許分類[G01L5/16]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 力,応力,トルク,仕事,機械的動力,機械的効率,または流体圧力の測定 (8,098) | 特定の目的に適合した,力,例.衝撃によるもの,仕事,機械的動力またはトルクを測定する装置または方法 (2,038) | 力の複数分力を測定するもの (304)
国際特許分類[G01L5/16]に分類される特許
11 - 20 / 304
回転検出装置、検出装置、電子機器及びロボット
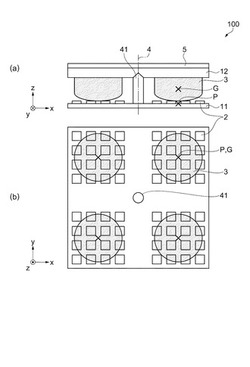
【課題】回転力の方向と大きさを高感度で検出する事が可能な回転検出装置、電子機器及びロボットを提供する。
【解決手段】回転軸4に対する外力の回転方向と大きさとを検出する回転検出装置100であって、第一基板11には基準点Pの回りに圧力センサー2が複数個設けられ、第二基板12には基準点Pと重なる位置、先端部が第一基板11に当接した状態で外力Fによって弾性変形する弾性体突起3が設けられている。第一基板11は回転軸4に対して固定されており、第二基板12は回転軸4に対して回転可能である。第二基板12に回転力が付加されると、弾性体突起3は圧縮変形し、複数の圧力センサー2で異なる値の圧力値が検出される。これらの圧力値に基づいて、高い精度で回転力の方向と大きさとを検出する。
(もっと読む)
入力インターフェイス装置

【課題】簡単に、外部機器に対して、複数のレベルの信号を任意に出力可能な入力インターフェイス装置を提供する。
【解決手段】入力インターフェイス装置は、表裏方向のばね定数が異なる複数の弾性層20、21が表裏方向に積層されてなる弾性部2を備え、表側から加わる荷重Fの変化による弾性部2の全体の表裏方向の圧縮荷重−変位特性が非線形であることを利用して、外部機器に対して、複数のレベルの信号を任意に出力可能とする。
(もっと読む)
荷重測定システム
【課題】小形・軽量化が容易な簡潔・薄型構造で設計の自由度及び高温環境下での安定性を有し、三軸荷重又は分布荷重の測定が可能な荷重センサを有する荷重測定システムを提供する。
【解決手段】本発明の荷重測定システムは、測定対象物との接触部に作用する荷重を測定するため、電極が形成された一対の基板と、一対の基板の電極間に挟持され、電圧を印加した状態で荷重Pを負荷することにより電気抵抗値が変化する特性及び1000℃オーダーの高温環境下で耐熱性を兼ね備えた導電性材料(GCを含む材料)とを備える荷重センサを有する。前記基板は、導電性部材により電極を兼ねて一体的に形成された構成に置き換えることもできる。
(もっと読む)
センサー素子、センサーデバイス、力検出装置およびロボット
【課題】3軸方向の力に対する検出能力に大きな差が出ない力検出装置と、その力検出装置を実現するセンサー素子を提供する。
【解決手段】非圧電性および非導電性を有する基板の少なくとも一方の面に圧電性被膜が形成された圧電体と、導電性を有する電極基板と、を有し、前記基板と前記電極基板との間に前記圧電性被膜が配置されるセンサー素子。
(もっと読む)
触覚センサ及び多軸触覚センサ
【課題】薄形でせん断力を計測することができる触覚センサ及び多軸触覚センサを提供する。
【解決手段】多軸触覚センサ1は、基板6の表面と略同一の面内に設けられたセンサ素子2と、前記センサ素子2の周囲を覆い、当該センサ素子2に外力を伝達する外装材42とを備える。前記センサ素子2は、少なくとも一端が前記基板6に支持される可撓性の梁7(8)を有する。前記センサ素子2は、前記基板6の表面に対し平行方向の前記梁7(8)の変形を検出する。
(もっと読む)
力センサー、力検出装置、ロボットハンド、ロボット、および力センサーの製造方法
【課題】圧電部材の水平方向の位置決め精度を確保しながら製造効率も向上させる。
【解決手段】圧電素子保持板110に複数の挿通孔110hを形成し、この挿通孔に中空形状のガイド部材112を挿通させて圧電素子保持板110を積層する。その後、ガイド部材112の中空部分に与圧ボルト114を通して上部部材102と下部部材104とを締結することによって、圧電素子保持板110(圧電素子)を与圧する。ここで、ガイド部材112の中空部分を与圧ボルト114の外径よりも小さくしておき、与圧ボルト114を通すとガイド部材112が押し広げられて挿通孔に当接するようにしておく。こうすれば、圧電素子保持板110の積層時には、挿通孔とガイド部材との間に隙間があるので迅速に積層することができ、積層後は与圧ボルト114を通してガイド部材112を押し広げることで、圧電素子保持板110を精度良く位置決めすることが可能となる。
(もっと読む)
検出装置、電子機器、及びロボット
【課題】外圧の方向と大きさを正確に検出することが可能な検出装置、電子機器、及びロボットを提供する。
【解決手段】基準点Pに加えられた外圧の方向及び大きさを検出する検出装置1は、面10aに基準点P毎に設けられた凹部16と、面10a側における基準点Pの周りに複数配置された圧力センサー12と、を備える第1基板10と、基準点Pと重なる位置に配置され、外圧によって圧力センサー12に当接した状態で弾性変形する弾性体突起22と、を備える。
(もっと読む)
センサ
【課題】物体に作用する力を検出する新規な構造のセンサを提供する。
【解決手段】センサ1は、対向して設けられたベース2、テーブル3と、これらの間を連結するパラレルリンク機構4とを備えている。パラレルリンク機構4の各リンク機構5は、ロッド部9とアーム部6とを有して構成されている。ベース2、テーブル3よりも剛性が低く、弾性変形するアーム部6は、ベース2で片持ち支持されている。ベース2、テーブル3よりも剛性が低く、弾性変形するロッド部9は、一端がアーム部6と直接接続され、他端がテーブル3と直接接続されている。このセンサ1は、アーム部6の変形を検出する歪み計11を備えている。
(もっと読む)
物体表面の質感計測装置およびそれを用いた紙葉類識別装置
【課題】実用的な感度および速度で、物体表面の質感を計測することが可能な質感計測装置を提供する。
【解決手段】紙葉類識別装置10は、触覚センサ200と、触覚センサ200および質感計測部30を有する質感計測装置とを備える。質感計測部30は、紙幣70が搬送路60を移動するのに伴って、触覚センサ200からの抵抗値を計測し、データ処理部36は、たとえば、計測データの時間変化を高速フーリエ変換して周波数成分を抽出する。
(もっと読む)
6軸力計測装置、及び6軸力計測方法
【課題】製作や小型化が容易であり、物体との接触面に柔軟性を持ち、更に柔軟素材が持つ複雑な応力歪み特性に依存せずに6軸力の計を測可能とする6軸力計測装置及びそのシステムを提供する。また、他の光学式触覚センサへ応用し、光学式触覚センサ自体の機能を失わずに同時に6軸力の計測が可能になるような、力学量計測装置及びそのシステムを提供する。
【解決手段】6軸力計測装置1は、タッチパッド3の他に、形状抽出手段としてのCCDカメラ4及び照明5と、圧力抽出手段としての圧力センサ10あるいは圧縮性流体19及び箱20を備える。CPU15は、CCDカメラ4によって撮影された画像から膜6の形状及び膜6の端に作用する張力の方向を抽出し、膜6の形状から物体W1が膜6に接触していない非接触領域を抽出する。さらに、CPU15は圧力センサ10からのアナログ信号を入力し、液体11の圧力を抽出する。最後にCPU15は、これらの情報から板7に作用する(任意の軸方向の力及びモーメント)6軸力を抽出する。
(もっと読む)
11 - 20 / 304
[ Back to top ]