
国際特許分類[G01S13/88]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 特定の応用に特に適合したレーダ方式または類似の方式 (1,783)
国際特許分類[G01S13/88]の下位に属する分類
マッピングまたはイメージング用のもの (348)
交通制御用のもの (112)
衝突防止目的のもの (1,014)
地形回避用のもの (5)
気象用のもの (129)
国際特許分類[G01S13/88]に分類される特許
131 - 140 / 175
被写体存在証明サービスシステム
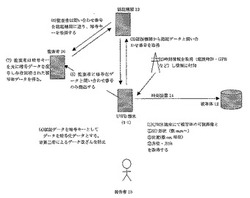
【課題】 被写体(撮像・計測データ)存在の認証機関による証明(第三者による公的な証明)を行うとともに、撮像・計測データの改変を防止するデータ基本構造・機構の提供による電子商取引のデータの保全を行うことを目的とする。
【解決手段】 この発明は、計測対象である被写体の存在を証明するシステムであって、入力情報の時刻認証を可能とする時刻情報を提供する認証手段と、上記被写体の複数の計測ポイントの位置情報を計測する位置計測部、この位置情報計測時の自身の基準位置と基準時刻を外部装置から取得する基準情報取得部、上記基準位置と基準時刻とを入力情報として上記認証手段より得られた時刻情報に基づき上記基準位置と基準時刻とを暗号化する暗号化部を有する計測手段とを備えたものである。
(もっと読む)
壁面探査装置

【課題】下地(2)に埋め込まれた物体(3)を探知するための壁面探査装置(1)およびこの装置が用いる方法であって、正確な深度情報が得られる装置および方法を提案する。
【解決手段】壁面探査装置(1)に、測定周波数(fM)の広帯域・高周波交流電場(9)を下地(2)に印加するための探知アンテナ(5)と、この探知アンテナ(5)に接続された、交流電場(9)の物体(3)との遅延相互作用を測定するための測定システム(6)と、測定信号から物体(3)を探知し、およびその深度情報を特定するための計算手段(7)とを設け、誘電率測定手段(8)に、測定周波数よりも低い誘電率測定周波数(fP)の場合における下地の誘電率測定信号を測定するための、少なくとも1個の追加電圧プレート(11)を設ける。
(もっと読む)
構造物中の電磁波の伝播速度推定方法、構造物内の物体探査方法、構造物中の電磁波伝播速度推定装置、構造物内の物体探査装置、コンピュータ・プログラム及び記録媒体
【課題】 コンクリート構造物等の構造物中の電磁波伝播速度推定方法、構造物内の物体探査方法を提供する。それに伴うコンピュータ・プログラム、記録媒体、構造物中の電磁波伝播速度推定装置、構造物内の物体探査装置を提供する。
【解決手段】 物体2が内在する構造物1の一主面上に送信器3と受信器4を配置し、送受信器3,4を一方向へ移動しながら送信器3から構造物1内にパルス状の電磁波を照射し物体2で反射した電磁波パルスを受信器4で受信する.電磁波パルスの観測波形から、各測定位置で電磁波パルスを受信するまでの伝播時間の観測値を求め、伝播時間の推定値を設定し、伝播時間の推定値は物体2の位置xT、yT(xTは一方向の位置、yTは深さ位置)と構造物1内の電磁波の伝播速度vの関数として表され、各測定位置の伝播時間の推定値と観測値との差分が最小となる推定値から、電磁波の伝播速度vと物体の位置xT、yT を同時に推定する。
(もっと読む)
会合時間算出装置、弾頭の起爆装置、及び飛翔体
【課題】 移動目標を追尾しつつ飛翔する飛翔体の、会合点までの到達時間(会合時間)の算出精度向上を図る。
【解決手段】 会合点hにおいて、離隔量(ミスディスタンス)Mを形成して飛翔体1が相手移動目標2が交差するとき、レーダ装置11により、時刻を異にして複数回得られる飛翔体1及び移動目標2の各位置情報から、飛翔体1を原点O(0,0,0)とした相対座標系において、現在座標位置P(x,y,z)に位置する移動目標2の速度Vt及び速度ベクトルVを得る。
離隔量Mを形成して会合するとき、移動目標2の会合座標位置H(x0,y0,z0)と原点Oとを結ぶベクトル(OH)と移動目標2の速度ベクトルVとが略直交することを条件として、会合座標位置H(x0,y0,z0)を求め、その会合座標位置Hと現在座標位置Pとの間の距離Dと、移動目標速度Vtとから、実会合時間Tに近い会合時間To を算出する。
(もっと読む)
軌道下構造探査装置
【課題】 マクラギによる反射の影響を小さくする。
【解決手段】 軌道下構造探査装置20は、マクラギ16を備えた軌道14に沿って移動可能な台車22を有する。台車22には、軌道14の下方にむけて電波を放射する少なくとも1つの送信アンテナ10が設けてある。また、台車22には、一対の受信アンテナ12(12a、12b)が取り付けてある。送信アンテナ10と受信アンテナ12とは、軌道14に沿った方向に直列状に配置してある。また、送信アンテナ10と受信アンテナ12とは、軌道14に沿った方向に離間させてある。
(もっと読む)
海上における対象物の捜索方法及びシステム並びに対象物の捜索方法を実行する記録媒体
【課題】捜索物及び捜索領域の状況に応じて捜索を確実にすることができる海上捜索システム及び装置並びにこの捜索を実行するプログラムを提供する。
【解決手段】海上に浮遊又は漂流又は走行している対象物を捜索する捜索方法であって、浮遊又は漂流又は走行している対象物の当該海域の海象条件を入力する入力装置103と、前記入力された海象条件及び対象物の大きさに応じた探知率変化を、予め記憶装置105に記憶されたデータベース106から読み出す読出し装置101と、前記読み出された探知率変化から対象物の認識確率を算出する算出装置102と、前記算出装置で算出された捜索モードを出力する出力装置104と、を備え、海象条件により捜索条件を策定する。
(もっと読む)
空間物質を発見・観察するための非恒星用走査型望遠鏡システム
【課題】 探査機を使わずに、現在の望遠鏡で見ることの難しい天体を詳細に観察すること。
空間に漂う物体をどんなものでも、その大きさおよび距離、時間にかかわらず詳細に発見、分析、観察を可能とすること。
【解決の手段】 非恒星系の物体を詳細に観察・発見するために走査型の望遠鏡システムの発明を提案する。
原理は、走査顕微鏡(SEM)を基礎としており、放射線等(X線や電波)を空間に放射し、その反射線を受信することでその空間に存在する物体を走査するものである。現在のレーダーにもほぼ一致する原理であるが、宇宙空間で距離と大きさ及び時間に依存しないところが大きな違いである。
【撰択図】 図1
(もっと読む)
手動ガイド走査型地中探査装置
【課題】高い干渉抵抗を備える手動ガイド走査型地中探査装置を得る。
【解決手段】手動ガイドで走査する地中探査装置は、所定の壁面距離をあけて調査すべき壁面上を分離遠隔ガイドするために形成した操作可能なハウジング、及び高周波電磁波領域で感知可能なセンサ手段を備え、センサ手段を外側から包囲する遮蔽輪郭のうち少なくとも大部分の包囲領域において、地中探査装置を高周波領域における電磁的干渉波から壁面距離を遮蔽する、電磁気的に有効なシールド手段を設置する。
(もっと読む)
埋設された長尺物体の探査装置および探査方法
【課題】被探査領域に埋設された合成樹脂管等の長尺物体を探査するための探査装置および探査方法を提案する。
【解決手段】本発明に係る探査装置(1)は,演算手段(7)および表示手段(8)を有する評価ユニット(6)を具え,さらに,被探査面(F)に沿って移動可能であり,かつ,探査経路センサ(10)と,アンテナ(12a)が設けられた送受信ユニット(11a)とを有する手持ち式の探査ヘッド(9)を具える。前記アンテナは,被探査面(F)内で相互に離間して配置された少なくとも2個のアンテナ(12a,12b)を含み,これらアンテナ(12a,12b)の被探査面(F)内における間隔が5cm〜50cmの範囲内に設定されている。
(もっと読む)
地中探査装置
【課題】 電磁波を用いて地上から地中を探査したときに、探査対象物の埋没状態を詳しく検知することができる地中探査装置を提供することを課題とする。
【解決手段】 地上から地中G2を探査するための地中探査装置1であって、電磁波を地面G1に対して斜めに送信するとともに、地中G2で反射した電磁波を受信するアンテナ部11を備えている。
(もっと読む)
131 - 140 / 175
[ Back to top ]