
国際特許分類[G01S13/88]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 特定の応用に特に適合したレーダ方式または類似の方式 (1,783)
国際特許分類[G01S13/88]の下位に属する分類
マッピングまたはイメージング用のもの (348)
交通制御用のもの (112)
衝突防止目的のもの (1,014)
地形回避用のもの (5)
気象用のもの (129)
国際特許分類[G01S13/88]に分類される特許
161 - 170 / 175
ケーブル、ケーブルの製造方法及びケーブルの位置特定方法
ケーブルに関するできるだけ広範囲で正確な情報、例えば製造情報は製造側でできるようにし、さらにそれらの情報、例えば連続するメートル数へのアクセスを容易にするために、本発明によれば、デジタルデータ(1231)を記憶するためのメモリ(123)と、このデジタルデータ(1231)を無線伝送するためのトランスポンダを備えたトランスポンダ装置(10)が集積されているケーブル(40)が提供される。  (もっと読む)
(もっと読む)
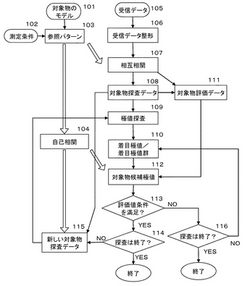
地中レーダ画像処理法
【課題】
地中レーダ等の近距離レーダの画像を処理する方法において、現在使われている処理法は、多大な計算時間を要する、また、特に複数の対象物が近接して存在する場合に虚像を生じるという欠点がある。本発明はこれら2つの課題を解決することを目的とする。
【解決手段】
対象物モデルから参照パターンを求め、参照パターンの自己相関、参照パターンと受信データとの相互相関を求める。相互相関から対象物探査用データと対象物評価用データを作成し、対象物探査用データの極値を自己相関と対象物評価用データに基づいて評価する。評価の結果、その極値値が対象物の可能性があると判定されると、対象物探査用データのその極値の位置から自己相関を減算し、新たな探査を実行する。
(もっと読む)
埋設物探知センサ

【課題】 磁気センサと電波センサとを併用して検出感度を向上させる複合型の埋設物探知センサを提供する。
【解決手段】 埋設物探知センサ10は、電波センサ14を構成する複数のアンテナ要素を円周上に配置し、前記電波センサ14の中央部に磁気センサ12の内側コイル16を配設するとともに前記電波センサ14の周囲に前記磁気センサ12の外側コイル18を配設した埋設物探知センサ10であって、前記電波センサ14は、前記各アンテナ要素を分離するスリット20を有するとともに、隣り合う前記アンテナ要素間の前記スリット20を金属箔36で接続した構成である。
(もっと読む)
アレイアンテナ装置
【課題】 受信感度の良好なアレイアンテナ装置を提供する。
【解決手段】 アレイアンテナ装置1の送信アンテナE1〜Enとして直線偏波アンテナを使用し、受信アンテナF1〜Fn+1として円偏波アンテナを使用する。また、送信アンテナE1〜Enと受信アンテナF1〜Fn+1を交互に配列する。
(もっと読む)
管内探査装置および案内装置
【課題】 管内を前進・後進移動する走行体に、レンズ付きカメラと空洞探査用レーダーとを備えると共に、地下に配設される管内へ容易に搬入可能な管内探査装置および案内装置を提供することである。
【解決手段】 ケーブルKを牽引しつつ管内を前進・後進移動する走行体3を先頭走行体31と後方走行体32とに分割し、前記先頭走行体31と前記後方走行体32とを屈曲自在に連結する構成の管内探査装置Rとし、前記先頭走行体を水平に、前記後方走行体を前記先頭走行体から上方にほぼ鉛直に屈曲させた状態で降下して、前記屈曲状態を水平状態に復帰して前進可能とする案内装置Gを用いて管内に搬入する構成とした。
(もっと読む)
地中レーダ装置および地中レーダ装置を用いた測定方法
【課題】 送受信アンテナを複数並べたアレイアンテナとし、更にCMP(Common Mid Point)などの信号処理手法で強いクラッタを避けるためのアレイアンテナ設計に関する。
【解決手段】 送受信アンテナを複数並べたアレイアンテナとし、更にCMP(Common Mid Point)などの信号処理手法で強いクラッタを避けるためのアレイアンテナ設計手法による。
(もっと読む)
飛翔体およびその誘導制御方法
【課題】 飛翔体の運用状況により発生する目視線回転角速度の検出誤差等による飛翔体の誘導精度の劣化を防止する。
【解決手段】 レドーム内に収納され、このレドーム外にある目標物の見かけの目視線方向を検出する目標物検出手段と、飛翔体を誘導するための誘導信号指令値を出力する誘導信号計算装置と、誘導信号指令値と飛翔体運動検出センサの検出値とを入力し、飛翔体の姿勢を制御する姿勢制御手段に姿勢制御指令値を与えるオートパイロットとを備えたものにおいて、オートパイロットが、誘導信号指令値と飛翔体運動検出センサの検出値との差である制御誤差信号を複数の周波数成分信号に分離する分離器を備え、該分離器で分離された各信号に対応して各々飛翔体に回転又は並進運動を与える姿勢制御指令値を姿勢制御手段に出力するようにした。
(もっと読む)
中継方式障害物検出システムおよび方法
【課題】 コストを抑えて通信経路網を増やすことにより解像度を高めたり検出範囲を拡大することが可能な障害物検出システムを提供する。
【解決手段】 本障害物検出システムは、親局、1以上の中継子局および受信子局を備える。親局は、中継に使用する第1の子局の1つを指定する第1の局識別情報と送信先である第2の子局を指定する第2の局識別情報とを含むパケットを生成し、搬送波を発生し、中継に使用する第1の子局に向けてパケットを搬送波により送信し、中継に使用する中継子局が少なくともパケットを中継送信する期間は、搬送波の送信を継続する。中継子局は、到来する電波を受信して受信データを獲得し、受信データに含まれる第1の局識別情報が自局宛である場合に限り、親局から受信した信号を中継送信し、中継送信に続いて、パケットに付加する情報を送信する。受信子局の1つと親局との通信が正常に行われたと判断できる場合、その子局と親局との経路には障害物がないと判断する。
(もっと読む)
物体検出法及び装置
物体の検出方法と装置に関する。1実施例では、保護領域に進入する人物を低パワー偏光電波で照射する。人物から反射される異なる偏光波を収集する。反射信号の多様なパラメータを測定し、これらの多様な選択された相違を計算して隠蔽武器を検出する。これらの相違は時間機能としてプロットされるとパターンを創出する。訓練された人工知能ネットワークパターン認識プログラムを使用してこれらのパターンを評価し、自動的に武器の存在を判定する。 (もっと読む)
人員携行型対迫レーダシステム
本発明は、敵軍の飛行迫撃砲弾を検出して追尾し、その原点(出射点)を算出して迫撃砲および砲兵への対策を講じる人員携行型対迫レーダ(MCMR)システムである。更に、MCMRは、飛行機、ヘリコプタおよび地上車両を検出して追尾することにより防衛監視を行える。MCMRは運搬のために分解可能であり、現地で迅速に組み立て、敵軍の迫撃砲による攻撃に対して360度の探索可能領域を提供する人員携行型レーダシステムである。MCMRは、レーダパルスを放射し反射された目標エコーを受信するアンテナと、アンテナから放射すべきレーダパルスを発生させる発信機と、目標エコーに関する測定(範囲、方位および仰角)を行い、多重エコーを関連づけて目標軌道を発生させ、迫撃砲弾として軌道を分類し、迫撃砲兵器の推定位置を計算する受信機プロセッサと、レーダを運転し処理済みのレーダデータを表示および解釈することができる制御および表示コンピュータとを備える。 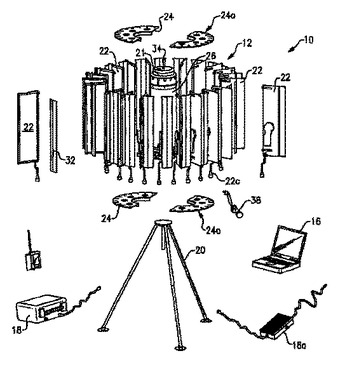 (もっと読む)
(もっと読む)
161 - 170 / 175
[ Back to top ]