
国際特許分類[G01S13/88]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 特定の応用に特に適合したレーダ方式または類似の方式 (1,783)
国際特許分類[G01S13/88]の下位に属する分類
マッピングまたはイメージング用のもの (348)
交通制御用のもの (112)
衝突防止目的のもの (1,014)
地形回避用のもの (5)
気象用のもの (129)
国際特許分類[G01S13/88]に分類される特許
101 - 110 / 175
飛翔体の誘導方法及び誘導システム
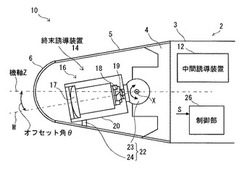
【課題】センサ部の設置構造の簡素化、小型化および低価格化を実現することができるとともに、終末誘導の実行の確実性及び信頼性を向上できる飛翔体の誘導方法及び誘導システムを提供する。
【解決手段】飛翔体2の機体3に対するセンサ部16の姿勢を調整できるようにセンサ部16を飛翔体の機体3に固定可能な構成としておく。飛翔体2の発射前に、中間誘導によって飛翔体2が目標1近辺に到達したときにセンサ部16の視野範囲に目標1が入るように飛翔体2の機体3に対するセンサ部16の姿勢を調整して固定しておく。
(もっと読む)
地中に埋設された又は土木建造物中に埋込された埋設パイプ又は他の物体を識別及び追跡するのに適する検出システム
本発明は、地中に埋設された又は土木建造物に埋込されたパイプ及びコンジット又は他の物体を識別及び追跡するよう設計された検出システムに関し、物体(1)に取付、又は一体化され、又は物体(1)から所定の距離をおかれて配置されたコーディング要素であって、所定の厚さの一連のコーディング要素群(3)の形をとり、それぞれが所定の寸法を持つ表面を形成し、前記要素群は互いに離れており、前記要素群の配置によってコードを定義する、コーディング要素と、少なくとも1つの送信コイル(5)、少なくとも1つの受信コイル(6)を備える検出装置と、前記コイル(5,6)からの信号を処理する装置とを備え、コーディング要素(3)の少なくともいくつかは、磁性材料からできており、前記検出装置は、前記コーディング要素(3)の動作点をその動作サイクル内で飽和又は変化させるよう構成され、基本周波数の電波及び前記基本周波数の複数倍の周波数を持つ高調波である電波からなる複数の周波数を含む信号を放射することによって、前記要素(3)からの前記信号を受信及び処理し、前記物体(1)の前記コードを再構築する。  (もっと読む)
(もっと読む)
地中埋設管路の調査方法

【課題】地中レーダを用いて埋設管の位置を調査するときに、従来よりも深い位置まで調査できるようにする。
【解決手段】地中に埋設された管11に沿ってボーリング孔14を形成する。ボーリング孔14と地表2との間で電磁波16の送受信を行うことによって、管11の埋設位置を検出する。
(もっと読む)
地中レーダ装置及び画像信号処理方法
【課題】地中内に埋設された物体の検知精度を向上した信頼性の高いものでありながら、その物体を特定するための演算式を簡素化することができる地中レーダ装置地中レーダ装置及び画像信号処理方法を提供する。
【解決手段】地表面を基準とする水平面内方向とこの地表面から地中に向かう深さ方向とで3次元の行列データの各要素の数値を取得する3次元データ取得ステップと、地表面を基準とする水平面内の移動平均を求める移動平均算出ステップと、前記3次元データ取得ステップと前記移動平均算出ステップとに基づいて3次元画像を作成する画像化ステップと、隣り合った画像の相互相関からそのピーク鋭度を求めるピーク鋭度算出ステップと、そのピーク鋭度が最大の条件から地雷画像を特定する地雷画像特定ステップと、その地雷画像の最大値をとる点に基づいて地雷座標を特定する地雷座標特定ステップとを備えている。
(もっと読む)
レーダ装置
【課題】レーダ装置と観測目標との間に相対運動がある場合にも、効率的なビーム走査を実現することのできるレーダ装置を得る。
【解決手段】波動を空間へビーム状に放射するビーム放射部20、30と、ビーム放射部が放射するビームの向きを走査するビーム走査部40とを備えたレーダ装置において、ビーム走査部40は、観測領域に隙間を持たせるように1回の走査を行い、複数回の走査を行うことにより観測領域のすべての走査を行うものである。
(もっと読む)
地中探査レーダにおける管径推定方法
【課題】地中探査レーダを用いて受信信号レベルから埋設管の口径を高精度で求める。【解決手段】基準深度における管径と受信信号レベルとの対応テーブルを記憶させ(S1)、通常の探査を行い(S2)、2系列の受信系から異なる伝搬時間に基づいて埋設深度と土壌の比誘電率を求める(S3)。一方、受信信号は逆STC処理され(S4)、推定のための受信信号レベルが求められる。前記深度および比誘電率から基準信号における対応テーブルの補正が行われ(S5)、この補正テーブルと前記受信信号レベルとを対比して管径が推定される(S6)。 (もっと読む)
飛しょう体の誘導装置
【課題】 飛しょう体の誘導装置において、目標に向けて電波を照射し捜索を開始する際に、内部の計算において海面および地面の反射電力(クラッタ電力)を一定として計算しているため、海面および地面の状況によってはクラッタ電力が少なく目標を探知する余裕が十分ある場合においても、捜索を開始せず目標の捜索を開始する距離が必要以上に短くなり、また、海面および地面の反射電力が大きい場合は目標捜索開始時に海面または地面に誤追尾してしまうという課題があった。
【解決手段】 誘導装置にクラッタ信号測定部を設け、実際に運用する環境下でのクラッタ電力を観測することにより、クラッタ電力計算部および捜索開始距離計算部で海面又は地面の状況に応じた捜索開始距離を算出することが可能とした。
(もっと読む)
地中探査装置
【課題】埋設物からの微弱な反射波の識別性に優れた地中探査装置を提供する。
【解決手段】地中探査装置100は、地表面を移動する台車10と、台車10に搭載され地中に探査用電磁波を放射する送信アンテナ11と、送信アンテナ11と異なる距離離間して台車10にそれぞれ搭載され埋設物からの反射波を受信する第1及び第2の受信アンテナ(12,13)と、両受信アンテナの受信信号をそれぞれ記憶するバッファメモリ21と、記憶された少なくとも一方の受信信号から埋設物の深度を算出する深度算出回路24と、両受信信号を比較し、台車10の移動方向距離と深度の両者に基づいて受信信号の埋設物同定を行う同定回路22と、同定された埋設物の両受信信号の台車移動方向偏差を深度値から補正する補正回路23と、補正された両受信信号を合成する合成表示回路25と、を備えている。
(もっと読む)
埋設物探査装置
【課題】移動方向の測定精度を向上させた埋設物探査装置を提供する。
【解決手段】埋設物探査装置100は探査用電磁波の送受に係る構成機器として、送信器11と、送信アンテナ12と、受信アンテナ13と、受信器14と、を含んでいる。また、装置100は受信器14が取得した受信信号を記憶する受信データバッファメモリ22と、装置100の一定移動距離毎にサンプリング信号を受信データバッファメモリ22に供給して、当該位置における受信信号を取り込むサンプリング回路24と、装置100の移動量を検出するロータリエンコーダ18と、サンプリング信号を補間サンプリング信号に変換する補間回路26と、サンプリング信号から所定の分割距離に対応した補間サンプリング信号を予測して出力する予測回路28と、を含んでいる。
(もっと読む)
誘導装置
【課題】 ドップラレーダを使用して目標を観測する誘導装置は、目標信号のドップラ周波数とメインローブクラッタのドップラ周波数が重なる領域では、メインローブクラッタ信号を誤検出する可能性がある。このため目標信号がメインローブクラッタ周波数範囲外に出てくる待ち受け処理をするが、待ち受け処理中は、目標又は誘導装置を搭載した飛しょう体が機動をしてビーム領域外とならない限り目標信号を検出できない。
【解決手段】 誘導装置のアンテナパターン及びクラッタ実測値を使用してメインローブクラッタ電力を算出し、別途算出した目標信号の電力と比較して、真に目標が検出困難なメインローブクラッタの角度範囲を算出する。これにより目標接近による目標信号電力の上昇及び実際のクラッタ状況に応じてメインローブクラッタ周波数範囲を狭くするものとした。
(もっと読む)
101 - 110 / 175
[ Back to top ]