
国際特許分類[G08G1/13]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 車両の位置の表示,例.時刻表によって運行される車両 (2,250) | 中央ステーションに向かうもの (1,267) | 地図形式の表示装置 (1,117)
国際特許分類[G08G1/13]に分類される特許
81 - 90 / 1,117
経路案内生成装置、方法及びシステム
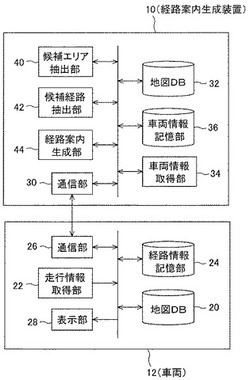
【課題】 交通状況の変化に応じた適切な経路情報を提供する。
【解決手段】 車両12の走行情報取得部22において、車両の現在位置を示す位置情報を取得する。位置情報は車両情報取得部34に送られ、道路地図を構成する複数のブロックの中から、前記車両の現在位置に対応するブロックを示すブロック情報を取得する。車両情報記憶部36は、一定時間を挟んだ二時点における前記ブロック情報を、起点ブロック及び終点ブロックとして記憶する。候補エリア抽出部40は、起点ブロック及び終点ブロックを起点・終点とするOD表を生成し、閾値を超える起点ブロック及び終点ブロックの組み合わせを、起点エリア及び終点エリアとして抽出する。候補経路抽出部42は、起点エリアから終点エリアに至る走行経路を候補経路として抽出し、候補経路に基づき経路図を生成する。
(もっと読む)
車両用走行計画生成システム

【課題】交通信号機の切替えタイミングのデータと関係なく、自車両が停止する可能性の高いショートトリップの停止地点を予測して走行計画を生成する。
【解決手段】本発明は、過去の車両のショートトリップの統計データを蓄積したデータベース13と、データベース13から、自車の現在のショートトリップにおける停止地点の候補を含む統計データを抽出する統計データ抽出部221と、抽出された統計データに含まれる停止地点の候補の中から、自車の現在のショートトリップの走行条件に基づいて、計画停止地点を予測する停止地点予測部222と、自車両が計画停止地点に停止するように、走行計画を生成する走行計画生成部223とを有する。
(もっと読む)
滞在情報生成システム及び滞在情報生成方法
【課題】ユーザの滞在情報を精度良く取得する。
【解決手段】ユーザ端末における現在位置の測位点を示す測位情報、測位点の測位時刻、及び測位点の測位精度を含む、複数のプローブ情報をプローブ情報記憶部に記憶し、プローブ情報記憶部に記憶されている各プローブ情報について、該プローブ情報の測位情報によって示される測位点を含む領域である滞在領域を、測位精度が低くなるにつれて大きくなるように特定し、各プローブ情報について、特定された滞在領域における滞在時間を測位時刻に基づいて算出し、該滞在領域における滞在時間及び/又は該プローブ情報の測位回数を、該滞在領域に含まれる各分割領域に滞在時間及び/又は測位回数として配分し、分割領域を示す領域情報と、配分された滞在時間及び/又は測位回数とを対応づけた滞在情報を生成して滞在情報記憶部に格納する。
(もっと読む)
滞在時刻情報生成システム及び滞在時刻情報生成方法
【課題】測位時刻間の任意の時刻におけるユーザの位置を把握可能とする。
【解決手段】ユーザ端末における現在位置の測位点を示す測位情報と、測位点の測位時刻とを含む、第1及び第2のプローブ情報を記憶しているプローブ情報記憶部を参照し、第1及び第2のプローブ情報の測位情報に基づいて、該測位情報によって示される測位点間におけるユーザ端末のユーザの移動経路を推定し、所定範囲の領域を分割して得られる複数の分割領域のうち、推定された移動経路上にある少なくとも1つの分割領域を特定し、第1及び第2のプローブ情報の測位時刻に基づいて、特定された分割領域ごとにユーザの滞在時刻を推定し、分割領域を示す領域情報と滞在時刻とを対応づけた滞在時刻情報を生成して滞在時刻情報記憶部に格納する。
(もっと読む)
ターンテーブル駐車場検出システム、ターンテーブル駐車場検出方法及びコンピュータプログラム
【課題】車両が駐車場から退出する際に正しい車両方位を設定することを可能としたターンテーブル駐車場検出システム、ターンテーブル駐車場検出方法及びコンピュータプログラムを提供する。
【解決手段】駐車場において車両4が駐車を実行した場合に、駐車場がターンテーブルを備えるターンテーブル駐車場かターンテーブルを備えない通常駐車場かを判定し、判定結果とともに判定対象の駐車場の位置情報をプローブ情報としてプローブセンタ2へと送信する。一方、プローブ情報を取得したプローブセンタ2は、受信したプローブ情報に基づいて、ターンテーブル駐車場と判定された駐車場の周囲に通常駐車場と判定された駐車場が位置するか否かを判定し、ターンテーブル駐車場と判定された駐車場の周囲に通常駐車場と判定された駐車場が位置しないと判定された場合に、該ターンテーブル駐車場と判定された駐車場をターンテーブル駐車場として検出するように構成する。
(もっと読む)
携帯電子機器および移動経路記録方法
【課題】地図情報を利用することなく移動経路を記録すること。
【解決手段】携帯電話端末(携帯電子機器)1は、位置情報に対応付けられた仮想オブジェクトを他の携帯電子機器における撮影画像に重ねて表示させるサーバ装置と通信する。携帯電話端末1は、位置を検出する位置・姿勢検出部36と、位置・姿勢検出部36によって検出された位置が変化すると、当該変化した位置に基づく指標情報を生成する指標情報生成部と、当該生成された指標情報を、前記サーバ装置へ前記位置情報として送信する制御部22とを備える。
(もっと読む)
流れ状態判別装置、流れ状態判別方法、流れ状態判別プログラムおよびそれらを用いたロボット制御システム
【構成】 ロボット制御システム100は、中央制御装置10、ロボット12および位置検出システム14を含む。中央制御装置10は、代表移動軌跡に関する情報を記憶する流れデータベース118を備え、大量に蓄積された人々の移動行動情報、および位置検出システム14によって随時検出される環境内の人(96)の位置履歴を利用して、代表移動軌跡ごとに人の流れの状態を判別し、環境内における人の流れの発生、終息および継続などを予測する。そして、中央制御装置10によって予測された人の流れ情報に基づいて、ロボット12の行動が決定される。
【効果】 予め環境内に設定した代表移動軌跡の流れの状態を判別することによって、環境内における人の流れを予測できるので、人の流れに応じた自然な行動をロボットに実行させることができる。
(もっと読む)
ユーザ行動認識装置および方法
【課題】 時系列的な位置情報に基づいてユーザ行動を認識するための装置および方法を提供する。
【解決手段】 ユーザ行動認識装置が、ユーザ位置データを受信し、時間に基づいてそのデータを調整して、時系列的なユーザ位置データを取得するように構成された位置データ受信手段と、時系列的なユーザ位置データを前処理するように構成されたデータ前処理手段と、前処理されたユーザ位置データに基づいて、ユーザ活動のタイプを認識するための特徴ベクトルを抽出するように構成された特徴ベクトル抽出手段と、特徴ベクトル抽出手段によって抽出された特徴ベクトルに基づいて、ユーザ活動のタイプを認識し、ユーザの行動特徴を把握するように構成されたユーザ行動認識手段とを備える。
(もっと読む)
情報収集方法および情報収集プログラム
【課題】通信資源を効率的に使用すること。
【解決手段】情報収集装置101は、移動体103に搭載された移動通信装置102からプローブ情報120を受信する。プローブ情報120は、移動通信装置102の位置情報と移動通信装置102の周囲の環境を特徴付ける環境情報とを含む情報である。情報収集装置101は、受信したプローブ情報120に含まれる移動通信装置102の位置情報に基づいて、移動通信装置102が特定のエリアA内に存在するか否かを判定する。情報収集装置101は、移動通信装置102が特定のエリアA内に存在する場合、移動通信装置102の周囲の環境を特徴付ける環境情報の送信を停止する停止要求130を移動通信装置102に送信する。
(もっと読む)
移動体位置推定サーバ
【課題】移動体が他の移動体を撮影可能な状況下で撮影された移動体のその後の位置の特定を効果的に支援する。
【解決手段】移動体から、位置特定機能により取得した前記移動体の位置情報と前記移動体から撮影した他の移動体の前部側及び後部側の少なくとも一方の撮影画像と撮影日時とを対応付けた撮影情報を受信し、前記撮影画像に含まれる撮影文字情報と前記撮影情報に含まれる前記位置情報と前記撮影日時とを対応付けた移動体解析情報をデータベースに記憶し、ユーザによる移動体登録番号を含むユーザ移動体情報の入力を受け付け、少なくとも前記ユーザにより入力された前記移動体登録番号と一致する撮影文字情報を含む移動体解析情報を基に、前記ユーザ移動体情報に含まれる移動体登録番号と一致する撮影文字情報と対応付けて記憶された位置情報のうち直近の位置情報の示す地点からの前記移動体登録番号で特定される移動体の走行範囲を推定する。
(もっと読む)
81 - 90 / 1,117
[ Back to top ]