
ファブリペロー干渉計を利用して位置を取得する装置

【課題】ファブリペロー干渉計を利用して位置を取得する装置及び方法の提供。
【解決手段】位置を取得する装置は、共焦点ファブリペロー干渉計200を有する。
【解決手段】位置を取得する装置は、共焦点ファブリペロー干渉計200を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置を取得する装置および方法と、位置を取得する装置とポジショナーとを有するシステムとに関する。
【背景技術】
【0002】
多くの用途分野において、対象物の位置、または対象物が移動する経路を取得することが要求される。一例として、マテリアルハンドリング技術やオートメーションにおいては、対象物の位置を監視して評価しなければならない。位置取得の精度が特に重要である用途分野として、対象物を所定の様式で移動させる位置決め技術が挙げられる。このようなポジショナーは、例えば研究や産業において使用されている。この場合に重要であるのは、精度ができる限り高いこと、測定範囲が大きいことに加えて、振動の影響を受けにくいことや、実際の使用時の堅牢性およびコンパクト性といった特性が挙げられる。
【0003】
特許文献1には、位置を取得する装置であって、検出器ヘッドとしてファブリペロー干渉計を使用する装置が開示されている。ファブリペロー干渉計において生成される干渉パターンを検出器によって検出する。検出器によって生成される検出器信号を、評価回路が直交検出法による評価する(quadrature evaluation)。この装置では、位置の取得もしくは経路長の測定またはその両方を極めて正確に行うことができるが、ファブリペロー干渉計の共振器のミラーが正確に平行であることが要求されるため、製造コストおよび取付けコストが増大したり、用途分野が限定される、あるいは装置の測定範囲が限られることがある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】欧州特許第2045572号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
したがって、本発明の目的は、多様な用途において高い費用効率で使用できる、位置を取得する装置および方法を提供することである。特に、本装置は、ポジショナーに組み込むことができ、ポジショナーによって生成される位置決め経路を監視するものである。
【課題を解決するための手段】
【0006】
本発明の上記の目的は、独立請求項の特徴によって達成される。本発明の実施形態および発展形態は、従属請求項の主題である。
【0007】
請求項1によると、位置を取得する装置は、共焦点ファブリペロー干渉計を有する。使用するファブリペロー干渉計が共焦点型である結果として、ファブリペロー干渉計の共振器内で周回する光線は、光路上に配置されているミラーの調整誤差とは無関係に、既知の点(一般には、ファブリペロー干渉計(共振器)の中に送り込まれる光線の入口点)にフォーカスされる。結果として、単純かつ費用効率の高い装置の設計を達成することができ、装置をその設置環境(例えばポジショナー)に設置するときの調整コストが小さい。さらに、本発明の装置は、条件が好ましくない(振動がある、設置空間が小さい)設置環境において使用することができ、これにより本発明の装置は、従来にはなく多様な用途に使用することが可能である。
【0008】
有利な一実施形態によると、共焦点ファブリペロー干渉計は、第1の共振器ミラーおよび第2の共振器ミラーと、第1の共振器ミラーと第2の共振器ミラーとの間の光路上に配置されている折り返しミラーと、を備えている。折り返しミラーは、位置を求める対象物に結合することができ、ファブリペロー干渉計内の光路の長さとは無関係なオートフォーカスを可能にする。結果として、極めて大きい測定範囲(例えば10cm以上)を単純な方法で達成することができる。
【0009】
共焦点ファブリペロー干渉計は、第1の共振器ミラーと第2の共振器ミラーとの間の光路上に配置されているコリメータを備えていることが好ましい。このコリメータは、ファブリペロー干渉計内で光路をフォーカスさせ、折り返しミラーと協働して、ファブリペロー干渉計内の光路の長さとは無関係なオートフォーカスをもたらす役割を果たす。共焦点ファブリペロー干渉計の中に折り返しミラーを設けずに1つまたは複数のコリメータを設けることもできる。
【0010】
第1の共振器ミラーおよび第2の共振器ミラーは、互いに対して固定された位置に配置されていることが好ましい。これによって、コンパクトかつ堅牢なファブリペロー干渉計を実施することができる。
【0011】
ファブリペロー干渉計のフィネスは、好ましくは1.0未満、特に好ましくは0.5未満である。この場合、ファブリペロー干渉計によって生成される干渉パターンのコントラストは、対象物の位置に依存してほぼ余弦関数に従って変化する。したがって、評価回路において干渉パターンを検出することによって得られる測定信号を相当に容易に評価することができ、特に、評価の精度が高まる。
【0012】
第1の共振器ミラーの反射率と、第2の共振器ミラーの反射率は、ほぼ同じ大きさであることが好ましい。これによって、干渉パターンの高いコントラスト、したがって位置決定の高い精度が可能になる。
【0013】
第2の共振器ミラーは、第1の共振器ミラーに横方向に隣接して配置されている光学部分の端面によって実施されていることが好ましい。一例として、第1の共振器ミラーを、光ファイバのコアの出口面とすることができ、第2の共振器ミラーを、光ファイバのコアを横方向に囲んでいるクラッドとすることができる。これによって、2枚の共振器ミラーを、構造的にコンパクトかつ安定的に、かつ高い費用効率で実施することが可能になり、光ファイバの場合、単に光ファイバの研磨された端面(クラッド面およびコア面)から、単純にこれらの共振器ミラーを作製することができる。
【0014】
第2の共振器ミラー、およびコリメータ(該当する場合)を適切な寸法とすることによって、本発明の装置は、10−4m以上、特に、10−3m以上、さらには10−2m以上の測定範囲にわたり、ただちに変位を測定する、または位置を決定することができる。この場合、測定経路全体にわたり、分解能をサブナノメートルオーダーとすることができる。
【0015】
位置を取得する方法は、共焦点ファブリペロー干渉計によって、対象物の位置に依存する干渉パターンを生成するステップと、この干渉パターンを検出するステップと、検出によって得られる測定信号を評価して、対象物の位置を取得または決定するステップと、を含んでいる。本発明の方法は、単純な構造の設計のファブリペロー干渉計によって前述した方式で具体化することができ、取付けおよび調整のコストが比較的小さい。
【0016】
以下では、本発明について、図面を参照しながら例示を目的としてさらに詳しく説明する。
【図面の簡単な説明】
【0017】
【図1】対象物の位置を求めるためのファブリペロー干渉計の原理の概略図と、対象物の位置と干渉計によって反射される光の強度とをプロットしたグラフを示している。
【図2】共焦点光学系を備えていないファブリペロー干渉計の概略図を示している。
【図3】ファブリペロー干渉計の光軸に対する共振器ミラーの傾斜角度と、ファブリペロー干渉計によって生成される干渉パターンのコントラストとをプロットしたグラフを示している。
【図4】共焦点ファブリペロー干渉計の例示的な実施形態の概略図を示している。
【図5】共焦点ファブリペロー干渉計の例示的な実施形態の概略図を示しており、干渉計の共振器の光路上に折り返しミラーを有する。
【図6】図5に示した共焦点ファブリペロー干渉計の光軸に対する折り返しミラーの傾斜角度と、干渉計によって生成される干渉パターンのコントラストとをプロットしたグラフを示している。
【図7】図5に示した共焦点ファブリペロー干渉計において、折り返しミラーが十分に傾いている場合の光路の概略図を示している。
【図8】図5に示した共焦点ファブリペロー干渉計において、折り返しミラーが十分に傾いていない場合の光路の概略図を示している。
【図9】図7による共焦点ファブリペロー干渉計の設計上のバリエーションの概略図を示している。
【図10】図7による共焦点ファブリペロー干渉計の設計上のさらなるバリエーションの概略図を示している。
【図11】測定システムの概略図と、3つの異なる経路長の場合に、対象物の位置と、共焦点ファブリペロー干渉計によって反射される光の強度の測定曲線とをプロットしたグラフとを示している。
【図12】本発明の例示的な一実施形態による評価回路の概略図を示している。
【図13】並進ポジショナーの例示的な実施形態の概略図を示している。
【発明を実施するための形態】
【0018】
図1は、ファブリペロー干渉計10の設計原理を示している。この干渉計10は、第1の共振器ミラーおよび第2の共振器ミラーを備えており、これらのミラーは互いに光共振器を形成している。第1の共振器ミラー1は半透明であり、入射光3の一部分を再帰反射する。入射光の残りの部分は共振器を横断して第2の共振器ミラーで反射され、一部分が第1の共振器ミラー1を通過する。したがって、ファブリペロー干渉計によって反射される光は、共振器ミラー1によって反射された光と、共振器ミラー2によって反射された光とが重なり合う結果である。
【0019】
反射光4の強度を測定することによって、ミラーの間隔、またはミラーの間隔の変化を求めることが可能である。図1の下側の図は、変位経路x(波長λの測定光の半波長λ/2を単位とする)に対してプロットされている反射光4の強度IRを示している。2枚の平坦な共振器ミラー1,2がほぼ同じ大きさの低い反射率を有するならば、強度IRの単純な関係、IR〜(1−cos2kx)/2(k=2π/λ)、が成り立つ。したがって、例えば第2の共振器ミラー2が点Aから点Bに変位すると、図1の下側に示したように反射光4の強度IRが変化する。測定光の波長λは既知であるため、反射光の強度IRを測定することによって、AからBへの共振器ミラー2の変位、したがってファブリペロー干渉計の共振器の長さの変化を求めることが可能である。
【0020】
図2は、図1を参照しながら説明した原理に基づくファブリペロー干渉計20を示している。測定光は、光ファイバ5によってファブリペロー干渉計20まで導かれる。光ファイバ5は、コア5aと、コア5aを囲むクラッド5bとを備えている。クラッド5bは、コア5aよりも反射率が(わずかに)低い。測定光3は、光ファイバ5の研磨された端部から出て、コリメータ6によって平行な光線3にフォーカスされる。平行な光線3は、第2の共振器ミラー2に当たり、第2の共振器ミラー2からコリメータ6に再帰反射され、コリメータ6によってフォーカスされて光ファイバ5に導かれる。この目的のため、コリメータ6のレンズ面は、光ファイバ5の出口面から間隔f(コリメータ6の焦点距離)のところに位置している。
【0021】
図2に示したファブリペロー干渉計20として実施した場合、第1の共振器ミラー1は、コア5aの光出口面によって形成されている。したがって、ファブリペロー干渉計の共振器は、コア5aの光出口面と、さまざまな位置をとる対象物(図示していない)に結合されている第2の共振器ミラー2との間に位置している。
【0022】
ファブリペロー干渉計20は、第2の共振器ミラー2によって再帰反射された光が、コリメータ6によってフォーカスされた後に光ファイバ5のコア5aに再び入るときにのみ機能する。そのための条件は、第2の共振器ミラー2が、ファブリペロー干渉計20の光軸に垂直であるように高い精度で調整されており、第2の共振器ミラー2が移動してもこの調整状態が維持されることである。構造的な観点では、対象物が動くときにこの条件を満たすことは難しく、いずれの場合にも調整に高いコストが要求される。このことは、例示的な単純な計算を用いて認識することができる。出口面におけるコア5aの直径(すなわち、第1の共振器ミラー1の直径)をMFD(モードフィールド径)で表す。第2の共振器ミラー2の、その理想的な姿勢に対する傾斜αは、第2の共振器ミラー2によって反射された光がコア5aに導かれ、したがって反射光4に干渉パターンが生じうるように、条件α<<MFD/(4f)を満たしていなければならない。MFD=10μm、f=10mmであれば、条件はα<<0.25mRADとなる。例えば、MFD=5μm、f=5mmのときも、条件値は同じになる。この条件を満たすためには、コストのかかる高精度のホルダー(precision holder)に第2の共振器ミラー2を取り付けて、第2の共振器ミラー2が傾斜ゼロの状態で並進動作するようにしなければならない。実際にはこれを達成することはできない、または高いコストが要求される。
【0023】
ファブリペロー干渉計のさらなる特性は、反射光4に存在する干渉パターンのコントラストである。このコントラストはできる限り大きくするべきであり、最適な状態では100%である。コントラストは次の等式によって表される。
【0024】
【数1】

この式において、RminおよびRmaxは次式によって与えられる。
【0025】
【数2】
【数3】
【0026】
R1は第1の共振器ミラー1の反射率、R2は第2の共振器ミラー2の反射率を表す。これらの等式から、最大コントラストはR1=R2の場合に得られ、なぜなら、その場合にRmin=0が成り立つためである。このことは、図2に示したファブリペロー干渉計20(第1の共振器ミラー1が、反射率R1が比較的低い研磨されたガラス端面によって形成されている)の場合、第2の共振器ミラー2の反射率R2も比較的低いべきであることを意味する。例えば、2枚のミラー1,2の反射率を、0.15未満、特に、0.07未満とすることができ、例えば、研磨されたガラスのR1=R2≒0.04にすることができる。
【0027】
図3は、R1=R2のときのファブリペロー干渉計20のコントラストを傾斜角度αの関数として示している。上述したように、この干渉計は極めて狭い許容範囲の傾斜角度αにおいてのみ機能する。
【0028】
図3を参照しながら説明した、共焦点型ではないファブリペロー干渉計20における調整の問題を克服する目的で、本発明によると、共焦点ファブリペロー干渉計を使用する。図4は、位置を求めるための共焦点ファブリペロー干渉計100の第1の例示的な実施形態を示している。既出の図面と同様に、同一または類似する部分は同じ参照記号によって表してある。図4に示したファブリペロー干渉計100は、図2に示したファブリペロー干渉計20と異なる点として、第1のコリメータ6によって生成される光線3を第2の共振器ミラー2上にフォーカスする第2のコリメータ6’が、共振器の中に設けられている。図4に示したように、第2の共振器ミラー2が傾いても、第2の共振器ミラー2によって反射される光3’は再帰反射され、2枚のコリメータ6,6’を通過した後、再び光ファイバ5のコア5aに正確に戻される。第2のコリメータ6’は、第1のコリメータ6と同じ焦点距離fを有することができる。したがって、共焦点光学系6,6’の効果は、上述したミラーの傾斜に関連する問題(装置のコストが高い、調整が難しい)を排除することである。
【0029】
ファブリペロー干渉計100の測定範囲Δxmaxは、第2の共振器ミラー2上の焦点の被写界深度によって制限されるため、比較的小さい。実際には、測定範囲は、例えば約40μmに制限される。したがって、図4に示したファブリペロー干渉計100を利用したときには、比較的大きな変位経路を得ることはできない。
【0030】
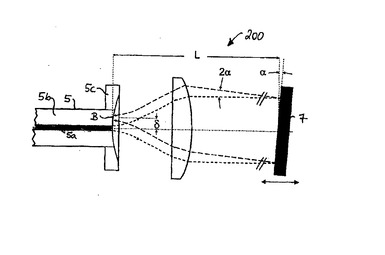
図5は、共焦点ファブリペロー干渉計200の第2の例示的な実施形態を示しており、この干渉計200を利用することにより、測定範囲Δxmaxが焦点距離fによってではなく構造的な要因のみによって制限される(したがって極めて大きくできる)ようにすることが可能である。ファブリペロー干渉計200は、図4に示したファブリペロー干渉計100の光路を、コリメータ6とコリメータ6’との間の中間垂直線Yにおいて折り返すという発想に基づいている。折り返す効果として、共焦点光学系の焦点が、移動することのない(静止した)ミラー上に必ず位置し、したがって、図4を参照して説明したファブリペロー干渉計100の測定範囲の制限が克服される。これと同時に、干渉計の光学系の共焦点特性が維持され、すなわち、図5に示したファブリペロー干渉計は共焦点型の干渉計200である。
【0031】
図4に示した共焦点光学系の光路3,3’の折り返しは、ファブリペロー干渉計200において平面の折り返しミラー7によって達成されている。折り返しミラー7は、位置または位置の変化を求める対象物(図示していない)に結合されており、移動することができる。光ファイバ5から出てコリメータ6によってフォーカスされる光の光路3が、折り返しミラー7によって光路3cに転換される。この場合、ファブリペロー干渉計200の光軸に対する垂直面に対して、折り返しミラーの傾斜αが存在するものと想定する。折り返しミラー7によって反射された光線3cは、コリメータ6(この実施形態では図4におけるコリメータ6’の役割を果たす)を再び通過し、光ファイバ5の端面上にフォーカスされる。この場合、2つの焦点(すなわち、コア5aの軸線と、光ファイバ5の端面上の像点B)の間に、δ=2fαのオフセットが生じる。したがって、図5に示した光路3,3cは、図4においては第1の共振器ミラー1と第2の共振器ミラー2との間の光路3に一致する。光ファイバ5の端面(より正確には、後からさらに詳しく説明するように、光ファイバ5のクラッド5bの端面のみ)は、第2の共振器ミラー2を実施している。第2の共振器ミラー2は、入射光を反射し、往路と同じ経路(コリメータ6、折り返しミラー7、コリメータ6)を介して再び光ファイバ5のコア5aに送り返す。
【0032】
図5は、像点Bが依然として光ファイバ5の端面上に位置する限りは、干渉計の光学系の共焦点特性が傾斜角度αに依存しないことを明確に示している。光ファイバ5の直径(すなわちクラッドの直径)をDで表す。オフセットδの条件は、δ<D/2となる。
【0033】
光ファイバの直径Dの一般的な値は、一例としてD=125μmである。最大許容傾斜角度αの条件は、α<D/(4f)である。一例として、f=10mmの場合、α<3.125mRADである。
【0034】
容易に理解できるように、共焦点ファブリペロー干渉計200においては、折り返しミラー7に要求される調整精度は、(非共焦点型の)ファブリペロー干渉計20における第2の共振器ミラー2に要求される調整精度よりも、D/MFDの割合だけ緩和される。光ファイバ5のファイバ端(またはそこに取り付けられているミラー)の単純な寸法設計によって、調整の問題を自由に低減することができ、これは理想的である。
【0035】
上述したように、反射光4の高いコントラストを達成するためには、条件R1≒R2が成り立っているべきである。図5に示した共焦点ファブリペロー干渉計200の実施形態の場合、この条件は満たされ、なぜなら、コア5aの反射率R1がクラッド5bの反射率R2にほぼ一致するためである。例えば、R1≒R2≒0.04(すなわち4%)が成り立つ。折り返しミラー7は、2回の反射の場合に光強度への影響をできる限り小さくする目的で、0.9以上、特に、0.95以上の高い反射率Rcを有する、またはRc≒1.0(すなわちほぼ100%)であることが好ましい。折り返しミラー7の反射率Rcが高いことにより、δ<MFD/2である場合、すなわち、図2におけるように像点Bがコア5aの出口面に位置する場合、共焦点ファブリペロー干渉計200はもはや機能しない。重要な点として、この場合、折り返しミラー7が第2の共振器ミラー2になっており、結果として、等式(1)による反射光4における干渉パターンのコントラストが、ゼロに近い極めて小さい値をとる。
【0036】
図6は、共焦点ファブリペロー干渉計200の場合の、反射光4における干渉パターンのコントラストを傾斜角度αの関数として示している。この曲線は、図3に示した曲線とは逆である。実際には、このことは、傾斜角度αに関する要求条件が、ファブリペロー干渉計20とはまったく逆であることを意味する。すなわち、折り返しミラー7は、その「通常の位置」に対して傾斜角度α>MFD/(4f)だけ傾いて(すなわち「ずれて」)いなければならない。図6によるこの「ずれ条件」は、図3による調整条件よりも実際に達成することは相当に容易である。
【0037】
言い換えれば、図2に示したファブリペロー干渉計20を、単純な方策を使用することによって共焦点ファブリペロー干渉計200に変換することができる。そのために要求されることは、例えば、低い反射率R2の共振器ミラー2を、好ましくは高い反射率Rcの折り返しミラー7に置き換えることと、このミラーの軸方向調整(もともと困難である)を意図的に回避するのみである。さらには、干渉計の共振器内の光路長が2倍になることによって、精度が2倍に高まる。その他の特徴については、説明の反復を避けるため、図2に関する説明を参照されたい。
【0038】
図7および図8は、異なる傾斜角度αにおけるファブリペロー干渉計200の光路を詳細に示している。図7は、δ>MFD/2であるときの動作範囲を示している。像点Bはコア5aの外側に位置している。図8は、傾斜αが極めて小さいときの光路を示しており、この場合、像点Bはコア5aの領域に位置している(すなわちδ≦MFD/2)。この場合、コントラストの明らかな損失が観察される(図6を参照)。
【0039】
図5および図7〜図10に示したファブリペロー干渉計200を実現するための多数の可能な形態が考えられる。すべての例示的な実施形態において、光ファイバ5の端部を、ファイバフェルールまたはホルダー8とハウジング9とを介してコリメータ6にしっかりと結合することができる。これによって、第1の共振器ミラー1(この場合にはコア5aの出口面)と、第2の共振器ミラー2(この場合にはクラッド5bの端面)と、コリメータ6とから成る干渉計ヘッドの安定かつ堅牢な設計が得られる。光ファイバ5の端部と折り返しミラー7との間の間隔Lは、設計上の制限によって制約されるのみであり、ある角度αの場合に、コリメータ6の直径を大きくすることによって、もしくは、クラッド5bの直径Dを大きくすることによって、またはその両方によって、間隔Lを実質的に自由に大きくすることができる。1cm以上、さらには10cm以上の測定範囲がただちに可能である。この実施形態では、折り返しミラー7が並進動作する場合、条件MFD/2<δ<D/2が満たされている限りは、例えば、振動、あるいは並進動作そのものに起因して傾斜角度αが変化することが許容される。これによって、共焦点ファブリペロー干渉計200を多様な用途分野に採用することが可能になる。
【0040】
図9および図10は、ファブリペロー干渉計200のさらなるバリエーションを示している。図9および図10には、ファイバフェルール8およびオプションのハウジング9を示していない。図9によると、クラッド5bの有効直径Dを、光学部分(例えば環状部材5c)によって大きくすることができる。環状光学部分5cは、クラッド5bと同じ材料から作製することができ、クラッド5bの端面と同一平面にある環状面を有する。したがって、第2の共振器ミラー2の反射面、すなわち、像点Bを反射するために利用可能である面が、環状部材5cによって広がる。このようにすることで、最大許容傾斜αmax=D/(4f)がさらに大きくなる。
【0041】
ここまでに記載した例示的な実施形態においては、一例として、平面のミラー1,2,7を考慮してきた。図10によると、第2の共振器ミラー2の端面(すなわち、この実施形態ではクラッド5bの端面と、クラッド5bに隣接する環状部材5c(存在時)の端面)に、球面形状またはカットアウトを設けることができる。これによって、共焦点光学系の光学結像精度、およびしたがってファブリペロー干渉計200の光学特性が向上する。2枚の共振器ミラー1,2が湾曲形状を有することもできる。
【0042】
共焦点ファブリペロー干渉計200の設計上のさらなるバリエーション(図示していない)においては、異なる点として、第1の共振器ミラー1もしくは第2の共振器ミラー2またはその両方が光ファイバ5に一体化されておらず、1つまたは複数の個別の光学要素として実施されている。例えば、コリメータ6より上流の光路上に配置されており、光ファイバ5から出る測定光が通過する1つまたは複数の半透明のミラー板によって、第1の共振器ミラー1および第2の共振器ミラー2を実施することができる。このミラー板の径方向内側のゾーンおよび径方向外側のゾーン(または2つの対応する個別のミラー要素)は、第1の共振器ミラー1および第2の共振器ミラー2を形成することができ、例えば、異なる程度に金属化することができる(特に、折り返しミラーの反射率Rcが100%未満であるとき、第2の共振器ミラー2の反射率を第1の共振器ミラー1の反射率よりも高くすることができる)。さらには、適切な方策を採用することによって、干渉計の共振器を2回横断(1往復)させるのみならず、4回あるいは6回などの回数だけ横断させることも可能であり、それぞれの場合、共振器における光路が延びる割合だけ測定精度が高まる。
【0043】
図11の右側は、経路長の変化Δx(単位:nm)に対して、反射光4の強度IR(単位:μW)をプロットした図を示している。L=18mm、L=38mm、L=68mmの場合について、3本の測定曲線を示してある。波長λ=1550nmのレーザを利用して、強度I0の測定光を発生させた。コリメータ6の焦点距離はf=8mmであり、コリメータ6によって生成された光線3の直径は1.5mmであった。折り返しミラー7の経路変位Δxは、ピエゾスタックPによって達成した。図11の測定曲線が示しているように、この実施形態においてミラーに使用されている反射率(R1=R2=0.04、Rcは実質的に1)の場合、余弦形状のIR曲線が得られ、コントラストは常に実質的に100%であり、光ファイバ5の端部と折り返しミラー7(すなわち対象物)との間の間隔Lが大きいほど振幅が小さくなる。したがって、共焦点ファブリペロー干渉計200によって反射される光4の振幅IRを利用することで、対象物のおよその位置を求めることができる。
【0044】
図12は、本発明のファブリペロー干渉計100,200によって反射される光4を使用して対象物の位置xを求める位置取得装置300を、例示を目的として示している。この図に示した位置取得装置300は、直交検波の原理に基づいて動作し、直交検波については、特許文献1に詳しく説明されており、この文書は参照によって本出願に組み込まれている。
【0045】
反射光の強度IRはファブリペロー干渉計の反射率に比例し、この反射率は、(オプションとして)折り返しミラー7の反射率Rc=1.0(100%)を想定すると、一般に次式によって与えられる。
【数4】
【0046】
【0047】
フィネスFは、F=(πg/2)1/2によって求められる。
【0048】
特殊な場合であるR1=R2=Rのときには、次のようになる。
【数5】
【0049】
g2<<1ならば、第一近似として分母を無視することができ、ファブリペロー干渉計の反射率は、次の比例関係を満たす。
【数6】
【0050】
これは次式と等価である。
【数7】
【0051】
したがって、R1=R2=RでありRの値が小さい場合、反射光4の強度IRは、可変成分cos(2(P+1)kx)を有する信号である(k=2π/λ、Pは折り返し係数であって、P=0:折り返しなし、P=1:1枚の折り返しミラー、以下同様)(例えば図11を参照)。後述するように、このような信号は評価に非常に適している。
【0052】
ファブリペロー干渉計のフィネスFは、例えば、10.0未満、5.0未満、1.0未満、または0.5未満である。フィネスFの値が高いほど、曲線の形状の評価に基づいて信号を評価することが難しくなり、なぜなら、その場合には等式(7)による余弦形状が観察されないためである。
【0053】
小さいフィネスFを達成する目的で、ミラー1,2,7の少なくとも1つが低い反射率を有することができる。コア5aの領域およびクラッド5bの領域のいずれも、光ファイバ5の平面研磨された端部の反射率は、一般には4%程度であり、したがって、所望の低い反射性を有する。
【0054】
なお、共振器ミラー1,2の反射率および折り返しミラー7の反射率を、互いに異なる値に設定することも可能であることに留意されたい。しかしながら、この場合、反射光における干渉パターンの高いコントラスト(すなわち、Rmin=0)を常に目標とするべきであり、Rc≠100%、特に、Rcの値が低く、R1およびR2の値が異なる(適切な場合には大きく異なる)とき、この条件は満たされる必要がある。例えば、この点において、コア5a(または、光ファイバ5とは個別の第1の共振器ミラー1)の出口面と、クラッド5b(または、光ファイバ5とは個別の第2の共振器ミラー2)の端面とが、異なる反射率を有する、すなわち、異なる程度に金属化することが可能である。さらには、ファブリペロー干渉計200のフィネスFは、小さい値ではなく大きい値であることが望ましいこともあり、例えば、強度IRを強度プロファイルの余弦形状に基づいて評価しないときである。一例として、高い空間分解能の必要がなく、IRの周期性の基準点(例:最大値)の間の曲線のプロファイルによってではなく、例えば干渉パターンの周期性のみによって反射光を評価する場合が挙げられる。
【0055】
位置を取得する装置300は、干渉計ヘッド209と、検出器システム202と、評価回路204と、光源(レーザ)201とを備えている。以下では、これらの構成要素の具体的な例を示す。
【0056】
検出器システム202は、例えば、M個の独立したレーザ出力を提供する1×Mカプラー208を入力側に有する。例えば、対象物の運動を3次元で監視する場合、M=3を選択することが可能である。この場合、1×3カプラー208の空いている2つの出力に、位置を取得するための2つのさらなる干渉計装置を接続することができる。
【0057】
1×Mカプラー208の出力の1つは、2×2カプラー206に接続されている。2×2カプラー206の出力の一方は、SMF(シングルモードファイバ)207を介して干渉計ヘッド209に接続されている。干渉計ヘッド209は、例えば、前述した共焦点ファブリペロー干渉計ヘッド100,200の一方によって実施することができる。
【0058】
干渉計ヘッド209によってSMF207を介して戻される、強度IRの干渉光は、検出器210に導かれる。検出器210は測定信号を生成し、この信号は、オプションとして増幅器220において増幅された後、評価回路204に導かれる。
【0059】
高い精度が要求されない用途では、単純な評価手順が可能である。例えば、固定波長のレーザ201を使用することが可能であり、検出器信号(図11に示した強度プロファイルIRに対応する、または強度の周期性のみを有する)を直接評価することができる。可能な方法としては、前述したように強度プロファイルIRから得られる検出器信号の振幅を評価する方法(位置決定の精度は低い)以外に、1つの単純な方法として、例えば、曲線の最大値を数えることによって曲線の周期性を評価する(精度は(λ/2)/(P+1)であり、Pは折り返し係数)。曲線の周期性を評価する場合、曲線の形状は決定的に重要ではないため、この場合、特に、周期的ではあるが余弦形状ではない検出器信号を供給する、高いフィネスFを有する共焦点ファブリペロー干渉計を使用することも可能である。曲線の周期性(のみ)を評価する場合の精度である(λ/2)/(P+1)は、曲線の最大値(または曲線の周期性を求めるために使用される他の基準点)の間の曲線のプロファイルを使用して評価することによって高めることができる。このような評価は、一例として、例えば参照テーブルにあらかじめ格納されている曲線値との比較、もしくは補間、またはその両方によって、行うことができる。
【0060】
以下では、いわゆる直交検波方式に基づいて極めて正確に位置を求める位置取得装置300について、一例として図12を使用して説明する。この装置で使用される光源は、調整可能なレーザ201であり、このレーザを用いて測定光の波長を周期的に変調し、共焦点ファブリペロー干渉計100,200によって反射される光の強度IRを、測定光の変調周波数の関数として復調することによって、直交検出原理に従って評価する。このようにすることで、測定範囲全体にわたり、ナノメートルオーダー、さらにはサブナノメートルオーダーの精度で位置を求めることが可能である。
【0061】
直交検波方式を理解する目的で、最初に数学的背景について簡単に説明しておく。フィネスの低い共焦点ファブリペロー干渉計100,200では、正規化された検出信号は次式で与えられる。
【0062】
【数8】
kは、調整可能レーザ201の一時的に変化する波長λと、k=2π/λという関係にある。測定光の変調は次式によって記述することができる。
【0063】
【数9】
k0は固定の波数値、δkは変調レベルを表す。正規化された測定信号sは、特許文献1に記載されている導出に従って、項の合計として記述することができる。
【0064】
【数10】
項sDCは、時間に依存しない成分であり、次式として与えられる。
【0065】
【数11】
2番目の項sωは、時間に依存する成分であり、次式に従って、変調周波数fでの一時的な周期的振動を達成する。
【0066】
【数12】
この式において、ω=2πfである。3番目の項s2ωは、同様に時間とともに変化する成分であり、2倍の変調周波数(すなわち2f)での周期的な振動を構成する。
【0067】
【数13】
直交検出法による評価は、例えば、2つの成分sωおよびs2ω(時間とともに変化し、それぞれ周波数fおよび2fを有する)を復調することによって行うことができる。復調によって得られる復調信号は、以下のようになる。
【0068】
【数14】
および
【0069】
【数15】
信号SおよびSQの係数(prefactor)である2(P+1)xδkおよび(2(P+1)xδk/2)2は、対象物の位置x(すなわち求める値)に依存するため未知である。
【0070】
したがって、最初のステップは、対象物の位置の近似値xestimを求めることである。次いで、直交検波信号、
【0071】
【数16】
【0072】
【数17】
を、インクリメント(増分)カウント(increment count)および補間によって評価することにより、より高い精度を達成することができる。直交検波によって復調されたこれらの項を使用することで、位置xが、高い精度(サブナノメートルオーダーも可能である)で、具体的には次式として得られる。
【0073】
【数18】
この式で、Nは、基準点(ゼロ点)x0からx変位するときに得られる増分λ/[8(P+1)]のカウント値を表している。
【0074】
近似値xestimは、例えば、信号SQおよびSの最大値max(SQ)およびmax(S)を測定することによって、等式xestim≒(2/δk)(max(SQ)/max(S))に従って求めることができる。
【0075】
検出器220によって供給される検出器信号のこのような評価処理は、図12に一例として示した評価回路204によって行うことができる。この評価回路は、第1のロックイン増幅器212−1および第2のロックイン増幅器212−2と、第1のアナログ/デジタル変換器213−1および第2のアナログ/デジタル変換器213−2と、参照テーブルメモリにアクセスできるプロセッサ214と、アップ/ダウンカウンタ215とを備えている。さらに、評価回路204は、AC電圧発生器210の信号出力によって制御されるレーザドライバ216を備えている。レーザドライバ216は、調整可能レーザ201の温度を制御することができ、これにより、調整可能レーザ201は、λ=λ0+δλcos(ωt)に従って高い精度で波長変調を行う。調整可能レーザ201は、例えば、中心周波数1500nmで動作するDFB(分布帰還型)レーザとすることができる。このレーザ201は、反射光に起因して損傷したり不安定になることを防止する目的で、例えば35dbのファラデーアイソレータ(Faraday isolator)を使用することによって隔離することができる。
【0076】
検出器220によって出力される、角周波数ωおよび2ωを有する測定信号を、それぞれ、ロックイン増幅器212−1および212−2において復調する。これを目的として、2つのロックイン増幅器212−1,212−2の基準入力は、AC電圧発生器210のTTL基準出力に接続されている。検出器220の出力において出力される測定信号は、2つのロックイン増幅器212−1,212−2の信号入力に送られる。第1のロックイン増幅器212−1は基準角周波数ωに設定されており、第2のロックイン増幅器212−2は2倍の基準角周波数2ωに設定されている。第1のロックイン増幅器212−1(ωに同期して動作する)は、復調された信号S=−xδksin(2(P+1)k0x)を生成し、第2のロックイン増幅器212−2(角周波数2ωに同期して動作する)は、直交検波信号SQ=−(2(P+1)xλk/2)2cos(2(P+1)k0x)を供給する。オプションの条件としてδλ<<λ0を導入すると、係数δkは、式δk=−2πδλ/(λ0)2によって近似することができる(δλは波長変調の既知の波長レベルを指定する)。ロックイン増幅器212−1,212−2の2つの出力信号を、アナログ/デジタル変換器213−1,213−2によってデジタル信号に変換する。アナログ/デジタル変換器213−1,213−2の出力における第1の読み取りによって、増分λ/[8(P+1)]での変位経路xが得られる。これを目的として、アナログ/デジタル変換器それぞれの出力における最上位ビットMSBを、それぞれ、アップ/ダウンカウンタのカウント入力に送る。位置xは、次式に従って最も近いxNによって求められる。
【数19】
【0077】
例えば、2系統のカウント入力を有する24ビットのカウンタを、カウンタ215として使用することができる。
【0078】
プロセッサ214は、アナログ/デジタル変換器213−1,213−2の出力の第2の読み取りを行い、増分λ/8内でδxを計算する。この第2の読み取りは、変換器の出力のワード幅全体とすることができる。プロセッサ214に含まれている補間器が、2つの復調信号SおよびSQを処理し、次の関係に従ってδxを求める。
【数20】
【0079】
次いで、アップ/ダウンカウンタ215とプロセッサ214の補間器の出力を合計することにより、次式に従って値xを求める。
【数21】
【0080】
補間は、例えば参照テーブルメモリ(LUT)を利用して実行することができる。
【0081】
なお、直交検波方式は、必ずしも信号成分sωおよびs2ωに基づいて実行する必要はなく、例えば、直流成分sDCと信号成分sω、s2ωの一方とを用いても実行できることに留意されたい。重要な点として、直流成分sDCは同様にxに依存する。この場合、ロックイン増幅器212−1,212−2の一方を省くことができる。ただし、直交検波方式は、必ず少なくとも2つの信号成分の評価に基づく。
【0082】
位置を取得する本装置は、複数の有利な特性(分解能が高い、測定範囲が大きい、干渉計ヘッドがコンパクト(設計上の寸法1cm未満、重量1g未満)、設置が単純、光学的調整のコストが最小限または不要、堅い接続線が不要であるため耐振動性が高い)によって、多くの用途および設置環境において使用することができる。特に、厳しい環境(低温、超高真空、高磁界、高電界など)での使用も可能である。
【0083】
位置を取得する本装置を使用することで、例えば、ポジショナーの位置決め動作を、サブミリメートルオーダー、サブマイクロメートルオーダー、ナノメートルオーダー、さらにはサブナノメートルオーダーの位置決め精度で監視することができる。図13は、本発明の位置取得装置を利用して並進動作するポジショナー500の例示的な実施形態を、上面図として示している。ポジショナー500は、第1の静止部分501と、第1の部分501に対して変位させることのできる第2の部分(以下ではキャリア504と称する)とを有する。第1の部分501とキャリア504との間では、相対位置を調整するための装置が動作し、この装置は、例えば、並進軸503(この軸上でキャリア504を摺動させることができる)と、アクチュエータとして機能する圧電素子502とによって実施することができる。並進動作の方向は、双方向矢印P1によって示してある。
【0084】
この図に示した駆動装置は、いわゆる慣性モータ、あるいはスリップスティックドライブ(slip-stick drive)を意味する。スリップスティックドライブなどの設計では、位置決め動作のステップ幅を駆動装置の制御によって正確に規定することはできない。すなわち、ポジショナー500においてキャリア504に配置されている位置決め部分の位置を、駆動装置の制御を単に監視することによって(例えば、ステップを数えることによって)決定することはできず、ポジショナー500は、位置決めの監視を可能にする装置をさらに備えていなければならない。
【0085】
これを目的として、ここまでに記載した例示的な実施形態の1つによる位置取得装置を設ける。ここまでに記載した例示的な実施形態の1つに従って設計することのできる干渉計ヘッド508が、固定されている第1の部分501に保持されている。干渉計ヘッド508から出る照明光はミラー511に当たり、このミラー511は、変位可能なキャリア504に、移動方向(双方向矢印P1)に垂直な向きに取り付けられており、光を干渉計ヘッド508に再帰反射する。ミラー511は、例えば、折り返しミラー7とすることができ、あるいは図4に示したファブリペロー干渉計100の場合、第2の共振器ミラー2とすることもできる。干渉計ヘッド508は、光ファイバ507を介して検出器システム(図示していない)に接続されており、この検出器システムは、ここまでに記載した例示的な実施形態の1つに従って設計することができ、前述したさらなる構成要素(レーザ、評価回路)に接続されている。
【0086】
一点鎖線510はシステムの境界を表しており、例えばクライオスタットまたはその他の容器の壁によって実施することができる。干渉計ヘッド508(検出器要素を除く)だけは、閉じたシステムの中に収容する必要があり、オプションとして、(図13に示したように)ポジショナー500に組み込むこともできる。したがって、干渉計ヘッド508、または干渉計ヘッド508を備えたポジショナー500は、公知の位置取得装置やポジショナーが多くの場合に所望の機能を果たさない極端な環境(例えば、低温、超高真空(UHV)、高電界、高磁界)において使用することができる。
【0087】
並進ポジショナー500の場合、約1nm、さらにはそれ以下の光学分解能を達成することが可能である。ステップ幅は、圧電素子502を制御する電圧の関数、および温度の関数として、約5nm〜1μmの範囲内の値をとることができる。したがって、光学的な位置監視の分解能が高いため、駆動装置の機械的境界(例えば5nm)の領域において位置決め精度を達成することが可能である。多くの用途において特に有利なのは、最大移動経路が長いことであり、一般には数ミリメートルから最大で1センチメートルないし数センチメートルとすることができる。
【0088】
上記の例示的な実施形態は例示を目的としており、本明細書の開示内容は、複数の異なる例示的な実施形態に記載されている特徴を、技術的に可能な範囲で組み合わせたものも包含する。
【技術分野】
【0001】
本発明は、位置を取得する装置および方法と、位置を取得する装置とポジショナーとを有するシステムとに関する。
【背景技術】
【0002】
多くの用途分野において、対象物の位置、または対象物が移動する経路を取得することが要求される。一例として、マテリアルハンドリング技術やオートメーションにおいては、対象物の位置を監視して評価しなければならない。位置取得の精度が特に重要である用途分野として、対象物を所定の様式で移動させる位置決め技術が挙げられる。このようなポジショナーは、例えば研究や産業において使用されている。この場合に重要であるのは、精度ができる限り高いこと、測定範囲が大きいことに加えて、振動の影響を受けにくいことや、実際の使用時の堅牢性およびコンパクト性といった特性が挙げられる。
【0003】
特許文献1には、位置を取得する装置であって、検出器ヘッドとしてファブリペロー干渉計を使用する装置が開示されている。ファブリペロー干渉計において生成される干渉パターンを検出器によって検出する。検出器によって生成される検出器信号を、評価回路が直交検出法による評価する(quadrature evaluation)。この装置では、位置の取得もしくは経路長の測定またはその両方を極めて正確に行うことができるが、ファブリペロー干渉計の共振器のミラーが正確に平行であることが要求されるため、製造コストおよび取付けコストが増大したり、用途分野が限定される、あるいは装置の測定範囲が限られることがある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】欧州特許第2045572号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
したがって、本発明の目的は、多様な用途において高い費用効率で使用できる、位置を取得する装置および方法を提供することである。特に、本装置は、ポジショナーに組み込むことができ、ポジショナーによって生成される位置決め経路を監視するものである。
【課題を解決するための手段】
【0006】
本発明の上記の目的は、独立請求項の特徴によって達成される。本発明の実施形態および発展形態は、従属請求項の主題である。
【0007】
請求項1によると、位置を取得する装置は、共焦点ファブリペロー干渉計を有する。使用するファブリペロー干渉計が共焦点型である結果として、ファブリペロー干渉計の共振器内で周回する光線は、光路上に配置されているミラーの調整誤差とは無関係に、既知の点(一般には、ファブリペロー干渉計(共振器)の中に送り込まれる光線の入口点)にフォーカスされる。結果として、単純かつ費用効率の高い装置の設計を達成することができ、装置をその設置環境(例えばポジショナー)に設置するときの調整コストが小さい。さらに、本発明の装置は、条件が好ましくない(振動がある、設置空間が小さい)設置環境において使用することができ、これにより本発明の装置は、従来にはなく多様な用途に使用することが可能である。
【0008】
有利な一実施形態によると、共焦点ファブリペロー干渉計は、第1の共振器ミラーおよび第2の共振器ミラーと、第1の共振器ミラーと第2の共振器ミラーとの間の光路上に配置されている折り返しミラーと、を備えている。折り返しミラーは、位置を求める対象物に結合することができ、ファブリペロー干渉計内の光路の長さとは無関係なオートフォーカスを可能にする。結果として、極めて大きい測定範囲(例えば10cm以上)を単純な方法で達成することができる。
【0009】
共焦点ファブリペロー干渉計は、第1の共振器ミラーと第2の共振器ミラーとの間の光路上に配置されているコリメータを備えていることが好ましい。このコリメータは、ファブリペロー干渉計内で光路をフォーカスさせ、折り返しミラーと協働して、ファブリペロー干渉計内の光路の長さとは無関係なオートフォーカスをもたらす役割を果たす。共焦点ファブリペロー干渉計の中に折り返しミラーを設けずに1つまたは複数のコリメータを設けることもできる。
【0010】
第1の共振器ミラーおよび第2の共振器ミラーは、互いに対して固定された位置に配置されていることが好ましい。これによって、コンパクトかつ堅牢なファブリペロー干渉計を実施することができる。
【0011】
ファブリペロー干渉計のフィネスは、好ましくは1.0未満、特に好ましくは0.5未満である。この場合、ファブリペロー干渉計によって生成される干渉パターンのコントラストは、対象物の位置に依存してほぼ余弦関数に従って変化する。したがって、評価回路において干渉パターンを検出することによって得られる測定信号を相当に容易に評価することができ、特に、評価の精度が高まる。
【0012】
第1の共振器ミラーの反射率と、第2の共振器ミラーの反射率は、ほぼ同じ大きさであることが好ましい。これによって、干渉パターンの高いコントラスト、したがって位置決定の高い精度が可能になる。
【0013】
第2の共振器ミラーは、第1の共振器ミラーに横方向に隣接して配置されている光学部分の端面によって実施されていることが好ましい。一例として、第1の共振器ミラーを、光ファイバのコアの出口面とすることができ、第2の共振器ミラーを、光ファイバのコアを横方向に囲んでいるクラッドとすることができる。これによって、2枚の共振器ミラーを、構造的にコンパクトかつ安定的に、かつ高い費用効率で実施することが可能になり、光ファイバの場合、単に光ファイバの研磨された端面(クラッド面およびコア面)から、単純にこれらの共振器ミラーを作製することができる。
【0014】
第2の共振器ミラー、およびコリメータ(該当する場合)を適切な寸法とすることによって、本発明の装置は、10−4m以上、特に、10−3m以上、さらには10−2m以上の測定範囲にわたり、ただちに変位を測定する、または位置を決定することができる。この場合、測定経路全体にわたり、分解能をサブナノメートルオーダーとすることができる。
【0015】
位置を取得する方法は、共焦点ファブリペロー干渉計によって、対象物の位置に依存する干渉パターンを生成するステップと、この干渉パターンを検出するステップと、検出によって得られる測定信号を評価して、対象物の位置を取得または決定するステップと、を含んでいる。本発明の方法は、単純な構造の設計のファブリペロー干渉計によって前述した方式で具体化することができ、取付けおよび調整のコストが比較的小さい。
【0016】
以下では、本発明について、図面を参照しながら例示を目的としてさらに詳しく説明する。
【図面の簡単な説明】
【0017】
【図1】対象物の位置を求めるためのファブリペロー干渉計の原理の概略図と、対象物の位置と干渉計によって反射される光の強度とをプロットしたグラフを示している。
【図2】共焦点光学系を備えていないファブリペロー干渉計の概略図を示している。
【図3】ファブリペロー干渉計の光軸に対する共振器ミラーの傾斜角度と、ファブリペロー干渉計によって生成される干渉パターンのコントラストとをプロットしたグラフを示している。
【図4】共焦点ファブリペロー干渉計の例示的な実施形態の概略図を示している。
【図5】共焦点ファブリペロー干渉計の例示的な実施形態の概略図を示しており、干渉計の共振器の光路上に折り返しミラーを有する。
【図6】図5に示した共焦点ファブリペロー干渉計の光軸に対する折り返しミラーの傾斜角度と、干渉計によって生成される干渉パターンのコントラストとをプロットしたグラフを示している。
【図7】図5に示した共焦点ファブリペロー干渉計において、折り返しミラーが十分に傾いている場合の光路の概略図を示している。
【図8】図5に示した共焦点ファブリペロー干渉計において、折り返しミラーが十分に傾いていない場合の光路の概略図を示している。
【図9】図7による共焦点ファブリペロー干渉計の設計上のバリエーションの概略図を示している。
【図10】図7による共焦点ファブリペロー干渉計の設計上のさらなるバリエーションの概略図を示している。
【図11】測定システムの概略図と、3つの異なる経路長の場合に、対象物の位置と、共焦点ファブリペロー干渉計によって反射される光の強度の測定曲線とをプロットしたグラフとを示している。
【図12】本発明の例示的な一実施形態による評価回路の概略図を示している。
【図13】並進ポジショナーの例示的な実施形態の概略図を示している。
【発明を実施するための形態】
【0018】
図1は、ファブリペロー干渉計10の設計原理を示している。この干渉計10は、第1の共振器ミラーおよび第2の共振器ミラーを備えており、これらのミラーは互いに光共振器を形成している。第1の共振器ミラー1は半透明であり、入射光3の一部分を再帰反射する。入射光の残りの部分は共振器を横断して第2の共振器ミラーで反射され、一部分が第1の共振器ミラー1を通過する。したがって、ファブリペロー干渉計によって反射される光は、共振器ミラー1によって反射された光と、共振器ミラー2によって反射された光とが重なり合う結果である。
【0019】
反射光4の強度を測定することによって、ミラーの間隔、またはミラーの間隔の変化を求めることが可能である。図1の下側の図は、変位経路x(波長λの測定光の半波長λ/2を単位とする)に対してプロットされている反射光4の強度IRを示している。2枚の平坦な共振器ミラー1,2がほぼ同じ大きさの低い反射率を有するならば、強度IRの単純な関係、IR〜(1−cos2kx)/2(k=2π/λ)、が成り立つ。したがって、例えば第2の共振器ミラー2が点Aから点Bに変位すると、図1の下側に示したように反射光4の強度IRが変化する。測定光の波長λは既知であるため、反射光の強度IRを測定することによって、AからBへの共振器ミラー2の変位、したがってファブリペロー干渉計の共振器の長さの変化を求めることが可能である。
【0020】
図2は、図1を参照しながら説明した原理に基づくファブリペロー干渉計20を示している。測定光は、光ファイバ5によってファブリペロー干渉計20まで導かれる。光ファイバ5は、コア5aと、コア5aを囲むクラッド5bとを備えている。クラッド5bは、コア5aよりも反射率が(わずかに)低い。測定光3は、光ファイバ5の研磨された端部から出て、コリメータ6によって平行な光線3にフォーカスされる。平行な光線3は、第2の共振器ミラー2に当たり、第2の共振器ミラー2からコリメータ6に再帰反射され、コリメータ6によってフォーカスされて光ファイバ5に導かれる。この目的のため、コリメータ6のレンズ面は、光ファイバ5の出口面から間隔f(コリメータ6の焦点距離)のところに位置している。
【0021】
図2に示したファブリペロー干渉計20として実施した場合、第1の共振器ミラー1は、コア5aの光出口面によって形成されている。したがって、ファブリペロー干渉計の共振器は、コア5aの光出口面と、さまざまな位置をとる対象物(図示していない)に結合されている第2の共振器ミラー2との間に位置している。
【0022】
ファブリペロー干渉計20は、第2の共振器ミラー2によって再帰反射された光が、コリメータ6によってフォーカスされた後に光ファイバ5のコア5aに再び入るときにのみ機能する。そのための条件は、第2の共振器ミラー2が、ファブリペロー干渉計20の光軸に垂直であるように高い精度で調整されており、第2の共振器ミラー2が移動してもこの調整状態が維持されることである。構造的な観点では、対象物が動くときにこの条件を満たすことは難しく、いずれの場合にも調整に高いコストが要求される。このことは、例示的な単純な計算を用いて認識することができる。出口面におけるコア5aの直径(すなわち、第1の共振器ミラー1の直径)をMFD(モードフィールド径)で表す。第2の共振器ミラー2の、その理想的な姿勢に対する傾斜αは、第2の共振器ミラー2によって反射された光がコア5aに導かれ、したがって反射光4に干渉パターンが生じうるように、条件α<<MFD/(4f)を満たしていなければならない。MFD=10μm、f=10mmであれば、条件はα<<0.25mRADとなる。例えば、MFD=5μm、f=5mmのときも、条件値は同じになる。この条件を満たすためには、コストのかかる高精度のホルダー(precision holder)に第2の共振器ミラー2を取り付けて、第2の共振器ミラー2が傾斜ゼロの状態で並進動作するようにしなければならない。実際にはこれを達成することはできない、または高いコストが要求される。
【0023】
ファブリペロー干渉計のさらなる特性は、反射光4に存在する干渉パターンのコントラストである。このコントラストはできる限り大きくするべきであり、最適な状態では100%である。コントラストは次の等式によって表される。
【0024】
【数1】
この式において、RminおよびRmaxは次式によって与えられる。
【0025】
【数2】
【数3】
【0026】
R1は第1の共振器ミラー1の反射率、R2は第2の共振器ミラー2の反射率を表す。これらの等式から、最大コントラストはR1=R2の場合に得られ、なぜなら、その場合にRmin=0が成り立つためである。このことは、図2に示したファブリペロー干渉計20(第1の共振器ミラー1が、反射率R1が比較的低い研磨されたガラス端面によって形成されている)の場合、第2の共振器ミラー2の反射率R2も比較的低いべきであることを意味する。例えば、2枚のミラー1,2の反射率を、0.15未満、特に、0.07未満とすることができ、例えば、研磨されたガラスのR1=R2≒0.04にすることができる。
【0027】
図3は、R1=R2のときのファブリペロー干渉計20のコントラストを傾斜角度αの関数として示している。上述したように、この干渉計は極めて狭い許容範囲の傾斜角度αにおいてのみ機能する。
【0028】
図3を参照しながら説明した、共焦点型ではないファブリペロー干渉計20における調整の問題を克服する目的で、本発明によると、共焦点ファブリペロー干渉計を使用する。図4は、位置を求めるための共焦点ファブリペロー干渉計100の第1の例示的な実施形態を示している。既出の図面と同様に、同一または類似する部分は同じ参照記号によって表してある。図4に示したファブリペロー干渉計100は、図2に示したファブリペロー干渉計20と異なる点として、第1のコリメータ6によって生成される光線3を第2の共振器ミラー2上にフォーカスする第2のコリメータ6’が、共振器の中に設けられている。図4に示したように、第2の共振器ミラー2が傾いても、第2の共振器ミラー2によって反射される光3’は再帰反射され、2枚のコリメータ6,6’を通過した後、再び光ファイバ5のコア5aに正確に戻される。第2のコリメータ6’は、第1のコリメータ6と同じ焦点距離fを有することができる。したがって、共焦点光学系6,6’の効果は、上述したミラーの傾斜に関連する問題(装置のコストが高い、調整が難しい)を排除することである。
【0029】
ファブリペロー干渉計100の測定範囲Δxmaxは、第2の共振器ミラー2上の焦点の被写界深度によって制限されるため、比較的小さい。実際には、測定範囲は、例えば約40μmに制限される。したがって、図4に示したファブリペロー干渉計100を利用したときには、比較的大きな変位経路を得ることはできない。
【0030】
図5は、共焦点ファブリペロー干渉計200の第2の例示的な実施形態を示しており、この干渉計200を利用することにより、測定範囲Δxmaxが焦点距離fによってではなく構造的な要因のみによって制限される(したがって極めて大きくできる)ようにすることが可能である。ファブリペロー干渉計200は、図4に示したファブリペロー干渉計100の光路を、コリメータ6とコリメータ6’との間の中間垂直線Yにおいて折り返すという発想に基づいている。折り返す効果として、共焦点光学系の焦点が、移動することのない(静止した)ミラー上に必ず位置し、したがって、図4を参照して説明したファブリペロー干渉計100の測定範囲の制限が克服される。これと同時に、干渉計の光学系の共焦点特性が維持され、すなわち、図5に示したファブリペロー干渉計は共焦点型の干渉計200である。
【0031】
図4に示した共焦点光学系の光路3,3’の折り返しは、ファブリペロー干渉計200において平面の折り返しミラー7によって達成されている。折り返しミラー7は、位置または位置の変化を求める対象物(図示していない)に結合されており、移動することができる。光ファイバ5から出てコリメータ6によってフォーカスされる光の光路3が、折り返しミラー7によって光路3cに転換される。この場合、ファブリペロー干渉計200の光軸に対する垂直面に対して、折り返しミラーの傾斜αが存在するものと想定する。折り返しミラー7によって反射された光線3cは、コリメータ6(この実施形態では図4におけるコリメータ6’の役割を果たす)を再び通過し、光ファイバ5の端面上にフォーカスされる。この場合、2つの焦点(すなわち、コア5aの軸線と、光ファイバ5の端面上の像点B)の間に、δ=2fαのオフセットが生じる。したがって、図5に示した光路3,3cは、図4においては第1の共振器ミラー1と第2の共振器ミラー2との間の光路3に一致する。光ファイバ5の端面(より正確には、後からさらに詳しく説明するように、光ファイバ5のクラッド5bの端面のみ)は、第2の共振器ミラー2を実施している。第2の共振器ミラー2は、入射光を反射し、往路と同じ経路(コリメータ6、折り返しミラー7、コリメータ6)を介して再び光ファイバ5のコア5aに送り返す。
【0032】
図5は、像点Bが依然として光ファイバ5の端面上に位置する限りは、干渉計の光学系の共焦点特性が傾斜角度αに依存しないことを明確に示している。光ファイバ5の直径(すなわちクラッドの直径)をDで表す。オフセットδの条件は、δ<D/2となる。
【0033】
光ファイバの直径Dの一般的な値は、一例としてD=125μmである。最大許容傾斜角度αの条件は、α<D/(4f)である。一例として、f=10mmの場合、α<3.125mRADである。
【0034】
容易に理解できるように、共焦点ファブリペロー干渉計200においては、折り返しミラー7に要求される調整精度は、(非共焦点型の)ファブリペロー干渉計20における第2の共振器ミラー2に要求される調整精度よりも、D/MFDの割合だけ緩和される。光ファイバ5のファイバ端(またはそこに取り付けられているミラー)の単純な寸法設計によって、調整の問題を自由に低減することができ、これは理想的である。
【0035】
上述したように、反射光4の高いコントラストを達成するためには、条件R1≒R2が成り立っているべきである。図5に示した共焦点ファブリペロー干渉計200の実施形態の場合、この条件は満たされ、なぜなら、コア5aの反射率R1がクラッド5bの反射率R2にほぼ一致するためである。例えば、R1≒R2≒0.04(すなわち4%)が成り立つ。折り返しミラー7は、2回の反射の場合に光強度への影響をできる限り小さくする目的で、0.9以上、特に、0.95以上の高い反射率Rcを有する、またはRc≒1.0(すなわちほぼ100%)であることが好ましい。折り返しミラー7の反射率Rcが高いことにより、δ<MFD/2である場合、すなわち、図2におけるように像点Bがコア5aの出口面に位置する場合、共焦点ファブリペロー干渉計200はもはや機能しない。重要な点として、この場合、折り返しミラー7が第2の共振器ミラー2になっており、結果として、等式(1)による反射光4における干渉パターンのコントラストが、ゼロに近い極めて小さい値をとる。
【0036】
図6は、共焦点ファブリペロー干渉計200の場合の、反射光4における干渉パターンのコントラストを傾斜角度αの関数として示している。この曲線は、図3に示した曲線とは逆である。実際には、このことは、傾斜角度αに関する要求条件が、ファブリペロー干渉計20とはまったく逆であることを意味する。すなわち、折り返しミラー7は、その「通常の位置」に対して傾斜角度α>MFD/(4f)だけ傾いて(すなわち「ずれて」)いなければならない。図6によるこの「ずれ条件」は、図3による調整条件よりも実際に達成することは相当に容易である。
【0037】
言い換えれば、図2に示したファブリペロー干渉計20を、単純な方策を使用することによって共焦点ファブリペロー干渉計200に変換することができる。そのために要求されることは、例えば、低い反射率R2の共振器ミラー2を、好ましくは高い反射率Rcの折り返しミラー7に置き換えることと、このミラーの軸方向調整(もともと困難である)を意図的に回避するのみである。さらには、干渉計の共振器内の光路長が2倍になることによって、精度が2倍に高まる。その他の特徴については、説明の反復を避けるため、図2に関する説明を参照されたい。
【0038】
図7および図8は、異なる傾斜角度αにおけるファブリペロー干渉計200の光路を詳細に示している。図7は、δ>MFD/2であるときの動作範囲を示している。像点Bはコア5aの外側に位置している。図8は、傾斜αが極めて小さいときの光路を示しており、この場合、像点Bはコア5aの領域に位置している(すなわちδ≦MFD/2)。この場合、コントラストの明らかな損失が観察される(図6を参照)。
【0039】
図5および図7〜図10に示したファブリペロー干渉計200を実現するための多数の可能な形態が考えられる。すべての例示的な実施形態において、光ファイバ5の端部を、ファイバフェルールまたはホルダー8とハウジング9とを介してコリメータ6にしっかりと結合することができる。これによって、第1の共振器ミラー1(この場合にはコア5aの出口面)と、第2の共振器ミラー2(この場合にはクラッド5bの端面)と、コリメータ6とから成る干渉計ヘッドの安定かつ堅牢な設計が得られる。光ファイバ5の端部と折り返しミラー7との間の間隔Lは、設計上の制限によって制約されるのみであり、ある角度αの場合に、コリメータ6の直径を大きくすることによって、もしくは、クラッド5bの直径Dを大きくすることによって、またはその両方によって、間隔Lを実質的に自由に大きくすることができる。1cm以上、さらには10cm以上の測定範囲がただちに可能である。この実施形態では、折り返しミラー7が並進動作する場合、条件MFD/2<δ<D/2が満たされている限りは、例えば、振動、あるいは並進動作そのものに起因して傾斜角度αが変化することが許容される。これによって、共焦点ファブリペロー干渉計200を多様な用途分野に採用することが可能になる。
【0040】
図9および図10は、ファブリペロー干渉計200のさらなるバリエーションを示している。図9および図10には、ファイバフェルール8およびオプションのハウジング9を示していない。図9によると、クラッド5bの有効直径Dを、光学部分(例えば環状部材5c)によって大きくすることができる。環状光学部分5cは、クラッド5bと同じ材料から作製することができ、クラッド5bの端面と同一平面にある環状面を有する。したがって、第2の共振器ミラー2の反射面、すなわち、像点Bを反射するために利用可能である面が、環状部材5cによって広がる。このようにすることで、最大許容傾斜αmax=D/(4f)がさらに大きくなる。
【0041】
ここまでに記載した例示的な実施形態においては、一例として、平面のミラー1,2,7を考慮してきた。図10によると、第2の共振器ミラー2の端面(すなわち、この実施形態ではクラッド5bの端面と、クラッド5bに隣接する環状部材5c(存在時)の端面)に、球面形状またはカットアウトを設けることができる。これによって、共焦点光学系の光学結像精度、およびしたがってファブリペロー干渉計200の光学特性が向上する。2枚の共振器ミラー1,2が湾曲形状を有することもできる。
【0042】
共焦点ファブリペロー干渉計200の設計上のさらなるバリエーション(図示していない)においては、異なる点として、第1の共振器ミラー1もしくは第2の共振器ミラー2またはその両方が光ファイバ5に一体化されておらず、1つまたは複数の個別の光学要素として実施されている。例えば、コリメータ6より上流の光路上に配置されており、光ファイバ5から出る測定光が通過する1つまたは複数の半透明のミラー板によって、第1の共振器ミラー1および第2の共振器ミラー2を実施することができる。このミラー板の径方向内側のゾーンおよび径方向外側のゾーン(または2つの対応する個別のミラー要素)は、第1の共振器ミラー1および第2の共振器ミラー2を形成することができ、例えば、異なる程度に金属化することができる(特に、折り返しミラーの反射率Rcが100%未満であるとき、第2の共振器ミラー2の反射率を第1の共振器ミラー1の反射率よりも高くすることができる)。さらには、適切な方策を採用することによって、干渉計の共振器を2回横断(1往復)させるのみならず、4回あるいは6回などの回数だけ横断させることも可能であり、それぞれの場合、共振器における光路が延びる割合だけ測定精度が高まる。
【0043】
図11の右側は、経路長の変化Δx(単位:nm)に対して、反射光4の強度IR(単位:μW)をプロットした図を示している。L=18mm、L=38mm、L=68mmの場合について、3本の測定曲線を示してある。波長λ=1550nmのレーザを利用して、強度I0の測定光を発生させた。コリメータ6の焦点距離はf=8mmであり、コリメータ6によって生成された光線3の直径は1.5mmであった。折り返しミラー7の経路変位Δxは、ピエゾスタックPによって達成した。図11の測定曲線が示しているように、この実施形態においてミラーに使用されている反射率(R1=R2=0.04、Rcは実質的に1)の場合、余弦形状のIR曲線が得られ、コントラストは常に実質的に100%であり、光ファイバ5の端部と折り返しミラー7(すなわち対象物)との間の間隔Lが大きいほど振幅が小さくなる。したがって、共焦点ファブリペロー干渉計200によって反射される光4の振幅IRを利用することで、対象物のおよその位置を求めることができる。
【0044】
図12は、本発明のファブリペロー干渉計100,200によって反射される光4を使用して対象物の位置xを求める位置取得装置300を、例示を目的として示している。この図に示した位置取得装置300は、直交検波の原理に基づいて動作し、直交検波については、特許文献1に詳しく説明されており、この文書は参照によって本出願に組み込まれている。
【0045】
反射光の強度IRはファブリペロー干渉計の反射率に比例し、この反射率は、(オプションとして)折り返しミラー7の反射率Rc=1.0(100%)を想定すると、一般に次式によって与えられる。
【数4】
【0046】
【0047】
フィネスFは、F=(πg/2)1/2によって求められる。
【0048】
特殊な場合であるR1=R2=Rのときには、次のようになる。
【数5】
【0049】
g2<<1ならば、第一近似として分母を無視することができ、ファブリペロー干渉計の反射率は、次の比例関係を満たす。
【数6】
【0050】
これは次式と等価である。
【数7】
【0051】
したがって、R1=R2=RでありRの値が小さい場合、反射光4の強度IRは、可変成分cos(2(P+1)kx)を有する信号である(k=2π/λ、Pは折り返し係数であって、P=0:折り返しなし、P=1:1枚の折り返しミラー、以下同様)(例えば図11を参照)。後述するように、このような信号は評価に非常に適している。
【0052】
ファブリペロー干渉計のフィネスFは、例えば、10.0未満、5.0未満、1.0未満、または0.5未満である。フィネスFの値が高いほど、曲線の形状の評価に基づいて信号を評価することが難しくなり、なぜなら、その場合には等式(7)による余弦形状が観察されないためである。
【0053】
小さいフィネスFを達成する目的で、ミラー1,2,7の少なくとも1つが低い反射率を有することができる。コア5aの領域およびクラッド5bの領域のいずれも、光ファイバ5の平面研磨された端部の反射率は、一般には4%程度であり、したがって、所望の低い反射性を有する。
【0054】
なお、共振器ミラー1,2の反射率および折り返しミラー7の反射率を、互いに異なる値に設定することも可能であることに留意されたい。しかしながら、この場合、反射光における干渉パターンの高いコントラスト(すなわち、Rmin=0)を常に目標とするべきであり、Rc≠100%、特に、Rcの値が低く、R1およびR2の値が異なる(適切な場合には大きく異なる)とき、この条件は満たされる必要がある。例えば、この点において、コア5a(または、光ファイバ5とは個別の第1の共振器ミラー1)の出口面と、クラッド5b(または、光ファイバ5とは個別の第2の共振器ミラー2)の端面とが、異なる反射率を有する、すなわち、異なる程度に金属化することが可能である。さらには、ファブリペロー干渉計200のフィネスFは、小さい値ではなく大きい値であることが望ましいこともあり、例えば、強度IRを強度プロファイルの余弦形状に基づいて評価しないときである。一例として、高い空間分解能の必要がなく、IRの周期性の基準点(例:最大値)の間の曲線のプロファイルによってではなく、例えば干渉パターンの周期性のみによって反射光を評価する場合が挙げられる。
【0055】
位置を取得する装置300は、干渉計ヘッド209と、検出器システム202と、評価回路204と、光源(レーザ)201とを備えている。以下では、これらの構成要素の具体的な例を示す。
【0056】
検出器システム202は、例えば、M個の独立したレーザ出力を提供する1×Mカプラー208を入力側に有する。例えば、対象物の運動を3次元で監視する場合、M=3を選択することが可能である。この場合、1×3カプラー208の空いている2つの出力に、位置を取得するための2つのさらなる干渉計装置を接続することができる。
【0057】
1×Mカプラー208の出力の1つは、2×2カプラー206に接続されている。2×2カプラー206の出力の一方は、SMF(シングルモードファイバ)207を介して干渉計ヘッド209に接続されている。干渉計ヘッド209は、例えば、前述した共焦点ファブリペロー干渉計ヘッド100,200の一方によって実施することができる。
【0058】
干渉計ヘッド209によってSMF207を介して戻される、強度IRの干渉光は、検出器210に導かれる。検出器210は測定信号を生成し、この信号は、オプションとして増幅器220において増幅された後、評価回路204に導かれる。
【0059】
高い精度が要求されない用途では、単純な評価手順が可能である。例えば、固定波長のレーザ201を使用することが可能であり、検出器信号(図11に示した強度プロファイルIRに対応する、または強度の周期性のみを有する)を直接評価することができる。可能な方法としては、前述したように強度プロファイルIRから得られる検出器信号の振幅を評価する方法(位置決定の精度は低い)以外に、1つの単純な方法として、例えば、曲線の最大値を数えることによって曲線の周期性を評価する(精度は(λ/2)/(P+1)であり、Pは折り返し係数)。曲線の周期性を評価する場合、曲線の形状は決定的に重要ではないため、この場合、特に、周期的ではあるが余弦形状ではない検出器信号を供給する、高いフィネスFを有する共焦点ファブリペロー干渉計を使用することも可能である。曲線の周期性(のみ)を評価する場合の精度である(λ/2)/(P+1)は、曲線の最大値(または曲線の周期性を求めるために使用される他の基準点)の間の曲線のプロファイルを使用して評価することによって高めることができる。このような評価は、一例として、例えば参照テーブルにあらかじめ格納されている曲線値との比較、もしくは補間、またはその両方によって、行うことができる。
【0060】
以下では、いわゆる直交検波方式に基づいて極めて正確に位置を求める位置取得装置300について、一例として図12を使用して説明する。この装置で使用される光源は、調整可能なレーザ201であり、このレーザを用いて測定光の波長を周期的に変調し、共焦点ファブリペロー干渉計100,200によって反射される光の強度IRを、測定光の変調周波数の関数として復調することによって、直交検出原理に従って評価する。このようにすることで、測定範囲全体にわたり、ナノメートルオーダー、さらにはサブナノメートルオーダーの精度で位置を求めることが可能である。
【0061】
直交検波方式を理解する目的で、最初に数学的背景について簡単に説明しておく。フィネスの低い共焦点ファブリペロー干渉計100,200では、正規化された検出信号は次式で与えられる。
【0062】
【数8】
kは、調整可能レーザ201の一時的に変化する波長λと、k=2π/λという関係にある。測定光の変調は次式によって記述することができる。
【0063】
【数9】
k0は固定の波数値、δkは変調レベルを表す。正規化された測定信号sは、特許文献1に記載されている導出に従って、項の合計として記述することができる。
【0064】
【数10】
項sDCは、時間に依存しない成分であり、次式として与えられる。
【0065】
【数11】
2番目の項sωは、時間に依存する成分であり、次式に従って、変調周波数fでの一時的な周期的振動を達成する。
【0066】
【数12】
この式において、ω=2πfである。3番目の項s2ωは、同様に時間とともに変化する成分であり、2倍の変調周波数(すなわち2f)での周期的な振動を構成する。
【0067】
【数13】
直交検出法による評価は、例えば、2つの成分sωおよびs2ω(時間とともに変化し、それぞれ周波数fおよび2fを有する)を復調することによって行うことができる。復調によって得られる復調信号は、以下のようになる。
【0068】
【数14】
および
【0069】
【数15】
信号SおよびSQの係数(prefactor)である2(P+1)xδkおよび(2(P+1)xδk/2)2は、対象物の位置x(すなわち求める値)に依存するため未知である。
【0070】
したがって、最初のステップは、対象物の位置の近似値xestimを求めることである。次いで、直交検波信号、
【0071】
【数16】
【0072】
【数17】
を、インクリメント(増分)カウント(increment count)および補間によって評価することにより、より高い精度を達成することができる。直交検波によって復調されたこれらの項を使用することで、位置xが、高い精度(サブナノメートルオーダーも可能である)で、具体的には次式として得られる。
【0073】
【数18】
この式で、Nは、基準点(ゼロ点)x0からx変位するときに得られる増分λ/[8(P+1)]のカウント値を表している。
【0074】
近似値xestimは、例えば、信号SQおよびSの最大値max(SQ)およびmax(S)を測定することによって、等式xestim≒(2/δk)(max(SQ)/max(S))に従って求めることができる。
【0075】
検出器220によって供給される検出器信号のこのような評価処理は、図12に一例として示した評価回路204によって行うことができる。この評価回路は、第1のロックイン増幅器212−1および第2のロックイン増幅器212−2と、第1のアナログ/デジタル変換器213−1および第2のアナログ/デジタル変換器213−2と、参照テーブルメモリにアクセスできるプロセッサ214と、アップ/ダウンカウンタ215とを備えている。さらに、評価回路204は、AC電圧発生器210の信号出力によって制御されるレーザドライバ216を備えている。レーザドライバ216は、調整可能レーザ201の温度を制御することができ、これにより、調整可能レーザ201は、λ=λ0+δλcos(ωt)に従って高い精度で波長変調を行う。調整可能レーザ201は、例えば、中心周波数1500nmで動作するDFB(分布帰還型)レーザとすることができる。このレーザ201は、反射光に起因して損傷したり不安定になることを防止する目的で、例えば35dbのファラデーアイソレータ(Faraday isolator)を使用することによって隔離することができる。
【0076】
検出器220によって出力される、角周波数ωおよび2ωを有する測定信号を、それぞれ、ロックイン増幅器212−1および212−2において復調する。これを目的として、2つのロックイン増幅器212−1,212−2の基準入力は、AC電圧発生器210のTTL基準出力に接続されている。検出器220の出力において出力される測定信号は、2つのロックイン増幅器212−1,212−2の信号入力に送られる。第1のロックイン増幅器212−1は基準角周波数ωに設定されており、第2のロックイン増幅器212−2は2倍の基準角周波数2ωに設定されている。第1のロックイン増幅器212−1(ωに同期して動作する)は、復調された信号S=−xδksin(2(P+1)k0x)を生成し、第2のロックイン増幅器212−2(角周波数2ωに同期して動作する)は、直交検波信号SQ=−(2(P+1)xλk/2)2cos(2(P+1)k0x)を供給する。オプションの条件としてδλ<<λ0を導入すると、係数δkは、式δk=−2πδλ/(λ0)2によって近似することができる(δλは波長変調の既知の波長レベルを指定する)。ロックイン増幅器212−1,212−2の2つの出力信号を、アナログ/デジタル変換器213−1,213−2によってデジタル信号に変換する。アナログ/デジタル変換器213−1,213−2の出力における第1の読み取りによって、増分λ/[8(P+1)]での変位経路xが得られる。これを目的として、アナログ/デジタル変換器それぞれの出力における最上位ビットMSBを、それぞれ、アップ/ダウンカウンタのカウント入力に送る。位置xは、次式に従って最も近いxNによって求められる。
【数19】
【0077】
例えば、2系統のカウント入力を有する24ビットのカウンタを、カウンタ215として使用することができる。
【0078】
プロセッサ214は、アナログ/デジタル変換器213−1,213−2の出力の第2の読み取りを行い、増分λ/8内でδxを計算する。この第2の読み取りは、変換器の出力のワード幅全体とすることができる。プロセッサ214に含まれている補間器が、2つの復調信号SおよびSQを処理し、次の関係に従ってδxを求める。
【数20】
【0079】
次いで、アップ/ダウンカウンタ215とプロセッサ214の補間器の出力を合計することにより、次式に従って値xを求める。
【数21】
【0080】
補間は、例えば参照テーブルメモリ(LUT)を利用して実行することができる。
【0081】
なお、直交検波方式は、必ずしも信号成分sωおよびs2ωに基づいて実行する必要はなく、例えば、直流成分sDCと信号成分sω、s2ωの一方とを用いても実行できることに留意されたい。重要な点として、直流成分sDCは同様にxに依存する。この場合、ロックイン増幅器212−1,212−2の一方を省くことができる。ただし、直交検波方式は、必ず少なくとも2つの信号成分の評価に基づく。
【0082】
位置を取得する本装置は、複数の有利な特性(分解能が高い、測定範囲が大きい、干渉計ヘッドがコンパクト(設計上の寸法1cm未満、重量1g未満)、設置が単純、光学的調整のコストが最小限または不要、堅い接続線が不要であるため耐振動性が高い)によって、多くの用途および設置環境において使用することができる。特に、厳しい環境(低温、超高真空、高磁界、高電界など)での使用も可能である。
【0083】
位置を取得する本装置を使用することで、例えば、ポジショナーの位置決め動作を、サブミリメートルオーダー、サブマイクロメートルオーダー、ナノメートルオーダー、さらにはサブナノメートルオーダーの位置決め精度で監視することができる。図13は、本発明の位置取得装置を利用して並進動作するポジショナー500の例示的な実施形態を、上面図として示している。ポジショナー500は、第1の静止部分501と、第1の部分501に対して変位させることのできる第2の部分(以下ではキャリア504と称する)とを有する。第1の部分501とキャリア504との間では、相対位置を調整するための装置が動作し、この装置は、例えば、並進軸503(この軸上でキャリア504を摺動させることができる)と、アクチュエータとして機能する圧電素子502とによって実施することができる。並進動作の方向は、双方向矢印P1によって示してある。
【0084】
この図に示した駆動装置は、いわゆる慣性モータ、あるいはスリップスティックドライブ(slip-stick drive)を意味する。スリップスティックドライブなどの設計では、位置決め動作のステップ幅を駆動装置の制御によって正確に規定することはできない。すなわち、ポジショナー500においてキャリア504に配置されている位置決め部分の位置を、駆動装置の制御を単に監視することによって(例えば、ステップを数えることによって)決定することはできず、ポジショナー500は、位置決めの監視を可能にする装置をさらに備えていなければならない。
【0085】
これを目的として、ここまでに記載した例示的な実施形態の1つによる位置取得装置を設ける。ここまでに記載した例示的な実施形態の1つに従って設計することのできる干渉計ヘッド508が、固定されている第1の部分501に保持されている。干渉計ヘッド508から出る照明光はミラー511に当たり、このミラー511は、変位可能なキャリア504に、移動方向(双方向矢印P1)に垂直な向きに取り付けられており、光を干渉計ヘッド508に再帰反射する。ミラー511は、例えば、折り返しミラー7とすることができ、あるいは図4に示したファブリペロー干渉計100の場合、第2の共振器ミラー2とすることもできる。干渉計ヘッド508は、光ファイバ507を介して検出器システム(図示していない)に接続されており、この検出器システムは、ここまでに記載した例示的な実施形態の1つに従って設計することができ、前述したさらなる構成要素(レーザ、評価回路)に接続されている。
【0086】
一点鎖線510はシステムの境界を表しており、例えばクライオスタットまたはその他の容器の壁によって実施することができる。干渉計ヘッド508(検出器要素を除く)だけは、閉じたシステムの中に収容する必要があり、オプションとして、(図13に示したように)ポジショナー500に組み込むこともできる。したがって、干渉計ヘッド508、または干渉計ヘッド508を備えたポジショナー500は、公知の位置取得装置やポジショナーが多くの場合に所望の機能を果たさない極端な環境(例えば、低温、超高真空(UHV)、高電界、高磁界)において使用することができる。
【0087】
並進ポジショナー500の場合、約1nm、さらにはそれ以下の光学分解能を達成することが可能である。ステップ幅は、圧電素子502を制御する電圧の関数、および温度の関数として、約5nm〜1μmの範囲内の値をとることができる。したがって、光学的な位置監視の分解能が高いため、駆動装置の機械的境界(例えば5nm)の領域において位置決め精度を達成することが可能である。多くの用途において特に有利なのは、最大移動経路が長いことであり、一般には数ミリメートルから最大で1センチメートルないし数センチメートルとすることができる。
【0088】
上記の例示的な実施形態は例示を目的としており、本明細書の開示内容は、複数の異なる例示的な実施形態に記載されている特徴を、技術的に可能な範囲で組み合わせたものも包含する。
【特許請求の範囲】
【請求項1】
位置を取得する装置であって、
共焦点ファブリペロー干渉計(100,200)を有する、装置。
【請求項2】
前記共焦点ファブリペロー干渉計が、第1の共振器ミラー(1)および第2の共振器ミラー(2)と、前記第1の共振器ミラー(1)と前記第2の共振器ミラー(2)との間の光路上に配置されている折り返しミラー(7)と、を備えている、
請求項1に記載の装置。
【請求項3】
前記折り返しミラー(7)が、位置を求める対象物に機械的に結合されている、
請求項2に記載の装置。
【請求項4】
前記共焦点ファブリペロー干渉計(100,200)が、前記第1の共振器ミラー(1)と前記第2の共振器ミラー(2)との間の前記光路上に配置されているコリメータ(6,6’)を備えている、
請求項2または請求項3に記載の装置。
【請求項5】
前記折り返しミラー(7)が、0.9より大きい反射率、特に、0.95より大きい反射率を有する、
請求項2から請求項4のいずれかに記載の装置。
【請求項6】
前記折り返しミラー(7)が、前記ファブリペロー干渉計(200)の中の前記光路を、前記第1の共振器ミラー(1)から前記第2の共振器ミラー(2)に導き、かつ、前記第2の共振器ミラー(2)から前記第1の共振器ミラー(1)に導くような向きに配置されている、
請求項2から請求項5のいずれかに記載の装置。
【請求項7】
前記第1の共振器ミラー(1)および前記第2の共振器ミラー(2)が、前記ファブリペロー干渉計(200)の光学軸線に関して径方向に互いにオフセットして配置されている、
請求項2から請求項6のいずれかに記載の装置。
【請求項8】
前記第1の共振器ミラー(1)および前記第2の共振器ミラー(2)が互いに対して固定位置に配置されている、
請求項2から請求項7のいずれかに記載の装置。
【請求項9】
前記ファブリペロー干渉計(100,200)のフィネスが1.0より小さい、特に、0.5より小さい、
請求項1から請求項8のいずれかに記載の装置。
【請求項10】
前記第1の共振器ミラー(1)の反射率が0.15より小さい、特に、0.07より小さく、前記第2の共振器ミラー(2)の反射率が0.15より小さい、特に、0.07より小さい、
請求項2から請求項9のいずれかに記載の装置。
【請求項11】
前記第1の共振器ミラー(1)の前記反射率と前記第2の共振器ミラー(2)の前記反射率とがほぼ等しい大きさである、
請求項2から請求項10のいずれかに記載の装置。
【請求項12】
前記第1の共振器ミラー(1)が、光ファイバ(5)のコア(5a)の出口面を備えている、
請求項2から請求項11のいずれかに記載の装置。
【請求項13】
前記第2の共振器ミラー(2)が、
前記第1の共振器ミラーに横方向に隣接して配置されている光学部分、特に、光ファイバ(5)のクラッド(5b)、の端面を備えている、
請求項2から請求項12のいずれかに記載の装置。
【請求項14】
前記ファブリペロー干渉計(100,200)に送られる測定光を発生させる光源(201)と、
前記ファブリペロー干渉計(100,200)によって生成される干渉パターンの関数として測定信号を生成する検出器(210)と、
前記測定信号を評価する評価回路(204)と、
を備えている、請求項1から請求項13のいずれかに記載の装置。
【請求項15】
10−4mより大きい、特に、10−3mより大きい、特に、10−2mより大きい測定範囲にわたり、変位測定を行うように設計されている、
請求項1から請求項14のいずれかに記載の装置。
【請求項16】
ポジショナー(500)と、位置を取得する装置とから構成されているシステムであって、
前記ポジショナー(500)と、請求項1から請求項15のいずれかに記載の、位置を取得する装置(100,200,300)とを備えている、
システム。
【請求項17】
位置を取得する方法であって、
共焦点ファブリペロー干渉計(100,200)によって、対象物の前記位置に依存する干渉パターンを生成するステップと、
前記干渉パターンを検出するステップと、
前記検出によって得られる測定信号を評価して、前記対象物の位置を求めるステップと、
を含んでいる、方法。
【請求項1】
位置を取得する装置であって、
共焦点ファブリペロー干渉計(100,200)を有する、装置。
【請求項2】
前記共焦点ファブリペロー干渉計が、第1の共振器ミラー(1)および第2の共振器ミラー(2)と、前記第1の共振器ミラー(1)と前記第2の共振器ミラー(2)との間の光路上に配置されている折り返しミラー(7)と、を備えている、
請求項1に記載の装置。
【請求項3】
前記折り返しミラー(7)が、位置を求める対象物に機械的に結合されている、
請求項2に記載の装置。
【請求項4】
前記共焦点ファブリペロー干渉計(100,200)が、前記第1の共振器ミラー(1)と前記第2の共振器ミラー(2)との間の前記光路上に配置されているコリメータ(6,6’)を備えている、
請求項2または請求項3に記載の装置。
【請求項5】
前記折り返しミラー(7)が、0.9より大きい反射率、特に、0.95より大きい反射率を有する、
請求項2から請求項4のいずれかに記載の装置。
【請求項6】
前記折り返しミラー(7)が、前記ファブリペロー干渉計(200)の中の前記光路を、前記第1の共振器ミラー(1)から前記第2の共振器ミラー(2)に導き、かつ、前記第2の共振器ミラー(2)から前記第1の共振器ミラー(1)に導くような向きに配置されている、
請求項2から請求項5のいずれかに記載の装置。
【請求項7】
前記第1の共振器ミラー(1)および前記第2の共振器ミラー(2)が、前記ファブリペロー干渉計(200)の光学軸線に関して径方向に互いにオフセットして配置されている、
請求項2から請求項6のいずれかに記載の装置。
【請求項8】
前記第1の共振器ミラー(1)および前記第2の共振器ミラー(2)が互いに対して固定位置に配置されている、
請求項2から請求項7のいずれかに記載の装置。
【請求項9】
前記ファブリペロー干渉計(100,200)のフィネスが1.0より小さい、特に、0.5より小さい、
請求項1から請求項8のいずれかに記載の装置。
【請求項10】
前記第1の共振器ミラー(1)の反射率が0.15より小さい、特に、0.07より小さく、前記第2の共振器ミラー(2)の反射率が0.15より小さい、特に、0.07より小さい、
請求項2から請求項9のいずれかに記載の装置。
【請求項11】
前記第1の共振器ミラー(1)の前記反射率と前記第2の共振器ミラー(2)の前記反射率とがほぼ等しい大きさである、
請求項2から請求項10のいずれかに記載の装置。
【請求項12】
前記第1の共振器ミラー(1)が、光ファイバ(5)のコア(5a)の出口面を備えている、
請求項2から請求項11のいずれかに記載の装置。
【請求項13】
前記第2の共振器ミラー(2)が、
前記第1の共振器ミラーに横方向に隣接して配置されている光学部分、特に、光ファイバ(5)のクラッド(5b)、の端面を備えている、
請求項2から請求項12のいずれかに記載の装置。
【請求項14】
前記ファブリペロー干渉計(100,200)に送られる測定光を発生させる光源(201)と、
前記ファブリペロー干渉計(100,200)によって生成される干渉パターンの関数として測定信号を生成する検出器(210)と、
前記測定信号を評価する評価回路(204)と、
を備えている、請求項1から請求項13のいずれかに記載の装置。
【請求項15】
10−4mより大きい、特に、10−3mより大きい、特に、10−2mより大きい測定範囲にわたり、変位測定を行うように設計されている、
請求項1から請求項14のいずれかに記載の装置。
【請求項16】
ポジショナー(500)と、位置を取得する装置とから構成されているシステムであって、
前記ポジショナー(500)と、請求項1から請求項15のいずれかに記載の、位置を取得する装置(100,200,300)とを備えている、
システム。
【請求項17】
位置を取得する方法であって、
共焦点ファブリペロー干渉計(100,200)によって、対象物の前記位置に依存する干渉パターンを生成するステップと、
前記干渉パターンを検出するステップと、
前記検出によって得られる測定信号を評価して、前記対象物の位置を求めるステップと、
を含んでいる、方法。
【図1】


【図2】

【図3】

【図4】

【図5】

【図6】

【図7】

【図8】

【図9】

【図10】
【図11】

【図12】

【図13】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−174922(P2011−174922A)
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−26084(P2011−26084)
【出願日】平成23年2月9日(2011.2.9)
【出願人】(510093266)アットキューブ システムズ アーゲー (2)
【Fターム(参考)】
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願番号】特願2011−26084(P2011−26084)
【出願日】平成23年2月9日(2011.2.9)
【出願人】(510093266)アットキューブ システムズ アーゲー (2)
【Fターム(参考)】
[ Back to top ]