
Fターム[2F065LL11]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | 完全反射体 (2,799)
Fターム[2F065LL11]の下位に属するFターム
平面鏡(プリズム含む) (1,867)
多面鏡 (197)
再帰反射体 (362)
球面鏡、放物面鏡 (227)
Fターム[2F065LL11]に分類される特許
1 - 20 / 146
ゴム摩擦試験方法及びゴム摩擦試験装置
【課題】ゴム試験片の接触面形状を得るとともに接触面内の歪み分布を算出することで、ゴム試験片の摩擦摩耗特性を適切に評価できるゴム摩擦試験方法及びゴム摩擦試験装置を提供する。
【解決手段】本発明のゴム摩擦試験方法は、ドーナツ状のゴム試験片1の外周面11に画像解析用パターン13を形成するパターン形成工程と、ゴム試験片1の外周面11を、円筒部21が透明材料で形成された回転式ドラム2に接触させつつ、ゴム試験片1及び回転式ドラム2を回転させる摩擦試験工程と、摩擦試験工程と同時に、外周面11を円筒部21を通して撮影して外周面画像11Pを取得する画像取得工程と、取得した外周面画像11Pからゴム試験片1の接触面形状を得るとともに、外周面画像11Pに含まれる画像解析用パターン13に基いてゴム試験片1の接触面内の歪み分布を算出することにより、ゴム試験片1の摩擦摩耗特性を評価する評価工程と、を備える。
(もっと読む)
非接触座標測定機の真直度評価方法および真直度評価装置

【課題】
非接触座標測定機の真直度の評価作業に時間が掛からないようにする。
【解決手段】
直方体形の基材11と基材11の長さ方向に間隔を介して固定された複数の球体16,17,18,19とからなる評価用標準器1を高精度の接触座標測定機で測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての校正値Aを得る第1の手順と、評価する非接触座標測定機2で評価用標準器1を測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての測定値Bを得る第2の手順と、測定値Bから校正値Aを引いた補正値Cから非接触座標測定機2の真直度を評価する第3の手順とを実行する。
(もっと読む)
精密送り装置および精密移動装置
【課題】高精度な位置検出に基づく高精度な移動および位置決めが可能な精密送り装置および精密移動装置を提供すること。
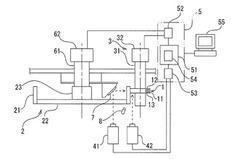
【解決手段】ベース2に支持されたテーブル31を所定の移動方向へ駆動する精密送り装置9は、テーブル31に接続されたロッド41と、ロッド41を移動方向に進退駆動する駆動機構4と、ベース2に対するロッド41の変位を検出するレーザ干渉計5とを有し、駆動機構4は、ロッド41への駆動力が移動方向の軸線に対して対称に作用するリニアモータ44を有し、レーザ干渉計5のレーザ光路56はロッド41を貫通して移動方向に延びており、ロッド41の移動軸線と駆動機構4の推力軸線とレーザ干渉計5の検出軸線とが一致している。
(もっと読む)
光学計測装置
【課題】本発明は、ヘッド部を大型化することなく、コントローラ部に対してヘッド部を交換することが可能なように互換性を持たせることができる光学計測装置を提供する。
【解決手段】本発明に従った光学計測装置では、計測対象物200に対して光を用いて計測を行ない、ヘッド部10と、コントローラ部20と、光ファイバ11と、記憶部40とを備えている。本発明に従った光学計測装置では、ヘッド部10とコントローラ部20とを光ファイバ11で接続する。記憶部40は、製造されるヘッド部10のそれぞれの個体に対して関係付けられ、コントローラ部20で行なう演算に必要な情報をヘッド部10の個体情報として記憶する。コントローラ部20は、コントローラ部20に対して物理的に独立して存在する記憶部40から個体情報を読出し、読出した個体情報を用いて演算を行なう。
(もっと読む)
撮像装置、位置計測装置及び撮像方法、位置計測方法、並びに構造物の製造方法
【課題】CCDやCMOSセンサなどの撮像素子を用いた薄型の撮像装置が多く用いられており、位置計測対象を複数の撮像装置で撮像して所定の画像処理を施すことにより、位置計測対象の位置を計測している。この時、視野を広くしても、分解能の低下を抑制できる撮像装置、位置計測装置及び撮像方法並びに位置計測方法を提供する。
【解決手段】視野V1〜V3の像を撮像する撮像素子2を備える。複数の視野の像を重ねて撮像素子に撮像可能とする像重ね部3を備える。前記像重ね部は、入射した光の少なくとも一部を前記撮像素子に入射させるビームスプリッターを有する。
(もっと読む)
光学式変位測定装置
【課題】光源から放射された入射光の微小な変位を測定するにあたり、出力信号のS/Nを向上させるとともに、回路構成を小型化することができる光学式変位測定装置を得る。
【解決手段】受光面が光に対して不感なギャップを介して複数の領域に分割された4分割フォトダイオード10に対して、光源から放射された入射光を入射させ、4分割フォトダイオード10のフォトダイオード11A〜11Dからの出力を増幅し、増幅された出力の変化に基づいて、4分割フォトダイオード10に対する入射光の相対的な変位を測定する光学式変位測定装置であって、4分割フォトダイオード10のフォトダイオード11A〜11Dには、それぞれ入射光によって出力を生じない不感領域12と、入射光によって出力を生じる感光領域13とが形成され、4分割フォトダイオード10全体について、不感領域12は、感光領域13に囲まれているものである。
(もっと読む)
光学式測定装置、プレス機、部品組合せ方法
【課題】小型化可能で高精度な形状測定が可能な光学式測定装置を提供する。
【解決手段】レーザ光源201が出力したビーム状の測定用光216は第2円錐ミラー207によって放射状の測定用光に変換され、ケース101の第2開口部102を通って出力された後、測定対象物220で反射され、第1開口部103を通ってケース101内へ入り、第1円錐ミラー209によって反射された後、受光レンズ213を介して光検出素子214で検出される。処理部240は、光検出素子214で検出された測定用光に基づいて測定対象物の形状を算出する。
(もっと読む)
レーザ干渉測定装置の横座標校正治具および横座標校正方法
【課題】収束光学系を有するレーザ干渉測定装置における測定面上の位置の校正が簡便かつ高精度に行えるレーザ干渉測定装置の横座標校正治具および横座標校正方法を提供すること。
【解決手段】横座標校正治具10は、マーカを有する画像を投影する画像投影手段19と、画像投影手段19を第1回動軸線A1まわりに回動自在に支持しかつ第1回動軸線が所定の回動中心Cを通る第1支持機構11と、第1支持機構を第2回動軸線A2まわりに回動自在に支持しかつ第2回動軸線が回動中心Cで第1回動軸線A1と交叉する第2支持機構12と、を有する。
(もっと読む)
検査装置および検査方法
【課題】簡素化を図りつつ、対象物を短時間で高精度に検査することができる。
【解決手段】撮像手段11と対象物Tとの間に光軸Oに交差する方向に向けて光線Lを放射する光源12と、光源12から放射された光線Lを撮像手段11の光軸O方向に沿って対象物T側に向けて反射するハーフミラー13と、ハーフミラー13と対象物Tとの間に光軸Oと同軸に配置され、外周面14aにハーフミラー13により反射された光線Lが入射する円錐状または円錐台状の内ミラー部材14と、内ミラー部材14よりも大径の円錐台状の孔部15が光軸Oと同軸に貫設され、孔部15の内周面15aに内ミラー部材14の外周面14aにより反射された光線Lが入射する外ミラー部材16とを備え、外ミラー部材16は、内ミラー部材14の外周面14aから孔部15の内周面15aに入射した光線Lを、対象物Tの外周面T1に垂直に入射するように反射する検査装置10を提供する。
(もっと読む)
寸法測定装置
【課題】凹凸パターンの上部及び下部の寸法を明確に区別して測定する。
【解決手段】基板5上に形成された凹凸パターンを拡大観察する顕微鏡1と、前記顕微鏡1を通して観察される前記凹凸パターンを撮像する撮像カメラ2と、前記顕微鏡1の対物レンズ7の視野外からその視野内に散乱光を照射する照明光学系3と、前記撮像カメラ2の画像を入力して表示部17の画面17a上に表示し、入力手段16により入力して前記表示画面17a上に指定された範囲内の前記凹凸パターンの上部及び下部のいずれか一方、又は両方の寸法を測定する制御手段4と、を備えたものである。
(もっと読む)
ふく進測定装置、ふく進測定システム及びふく進測定方法
【課題】簡素な構成でふく進量測定の作業効率や測定精度等を向上させる。
【解決手段】ふく進測定装置4は、鉄道のレール6R,6L上を走行する車両5に搭載され、車両走行中に、レール6R,6Lから側方に離れた位置で地面と一体的に設けられた基準マーカ2R,2Lと、レール6R,6Lと一体的に設けられたレールマーカ3R,3Lとを撮影するラインセンサ11R,11L,12R,12Lと、ラインセンサ11R,11L,12R,12Lで撮影された画像上において基準マーカ2R,2L及びレールマーカ3R,3Lを検出する画像処理部と、画像処理部で検出された情報から基準マーカ及びレールマーカのレール長手方向の位置を算出する位置算出部と、位置算出部で算出された各位置からレール6R,6Lのふく進量を算出するふく進量算出部と、を備えている。
(もっと読む)
光学式プローブ
【課題】光学系に可動機構を備えることなく、測定対象物の形状を逐次測定することが可能な光学式プローブを提供する。
【解決手段】レーザ光を出射するレーザ光源と、レーザ光源により出射されたレーザ光を平行光とするコリメータレンズと、コリメータレンズにより平行光とされたレーザ光をライン形状の光に変形する光形状変形手段と、光形状変形手段により変形されたライン形状の光を測定対象物に対して選択的に照射させる光照射手段と、光照射手段により選択的に照射されて測定対象物の表面にて反射されたレーザ光に基づいて測定対象物の画像を撮像する撮像手段と、光照射手段によるライン形状の光の照射を制御する制御手段と、を備え、制御手段は、光照射手段において、ライン形状の光の一端部から他端部まで所定の範囲ずつ順次光を照射させる。
(もっと読む)
エッジ検出装置及びそれを備えた画像形成装置
【課題】検出手段の光源の発光波長や記録媒体の反射率特性に依存することなく、様々な種類の記録媒体のエッジを短時間で正確に検出する。
【解決手段】移動している記録媒体Sの端部を検出するものであって、記録媒体Sよりも反射率の高い反射面31aを備えた反射手段31と、記録媒体S及び前記反射手段31の反射面31aに光を照射する光源と、記録媒体Sの幅方向に配列された光電変換素子画素を有し、光源から照射されて記録媒体S及び反射手段31の反射面31aで反射された反射光を光電変換素子画素で受光する受光手段と、受光手段において、予め設定された判定閾値よりも高い出力をする光電変換素子画素の領域を記録媒体SのエッジSaとして判定する制御手段を有する。
(もっと読む)
微細非周期パターン投影装置および方法とそれを用いた三次元計測装置
【課題】ユニークな特徴をもつ非周期パターンを投影して、なめらかな表面をもつ物体の三次元形状を計測する。
【解決手段】2種の菱形で構成した非周期パターン模様をワークに投影しステレオカメラで計測する。
(もっと読む)
欠陥検出装置及び欠陥検出方法
【課題】管状体の内表面に発生しうる凹凸疵及び模様系の疵を同時に検出すること。
【解決手段】本発明に係る欠陥検出装置は、管状体の軸方向に沿って移動しながら管状体の内表面に対して環状のレーザ光を照射して環状ビーム画像を複数生成する管状体撮像装置と、生成された環状ビーム画像に対して画像処理を行い、管状体の内表面に欠陥が存在するかを判断する演算処理装置とを備え、演算処理装置は、各環状ビーム画像における環状のレーザ光の照射部分の重心位置を算出する環状ビームセンター算出部と、環状ビーム画像の座標系を変換して光切断画像を複数生成する座標変換部と、各光切断画像から生成された縞画像フレームに基づき管状体の内表面の凹凸状態を表す深さ画像及び管状体の内表面でのレーザ光の輝度分布を表す輝度画像を算出する画像算出部と、算出された深さ画像及び輝度画像に基づき内表面に存在する欠陥を検出する欠陥検出部とを有する。
(もっと読む)
位置姿勢測定装置および3次元形状測定装置
【課題】3次元形状測定装置の撮像装置や接触子のように、3次元形状の測定に必要であり、かつ、その位置や姿勢が測定データに大きく影響する器具等の位置や姿勢を正確かつ簡便に測定できるようにする。
【解決手段】位置姿勢測定装置は、例えば、互いに直角をなす線状の第1、第2の像19A、19Bをそれぞれ結ぶレーザー光を利用するものであり、第1、第2の像19A、19Bと交差することで、レーザー光を反射して特定の方向に向かわせる反射具11を備える。また、反射具11は、再帰性反射材により設けられた3つの反射部23a〜23cを有し、反射部23a〜23cは、3角形の頂点を占めるように、かつ、反射されるレーザー光の光量が互いに異なるように設けられている。これにより、球面座標系を利用して撮像装置等の位置および姿勢を正確に測定することができる。
(もっと読む)
クロストーク補正係数算出方法およびクロストーク補正係数算出装置およびこれを用いた三次元表面形状測定装置
【課題】 複数波長による表面形状の測定方法およびこれを用いた装置によって測定する場合に発生するクロストーク現象のクロストーク補正係数を算出する。
【解決手段】 測定対象面の平面領域内から輝度の異なる6点以上の干渉輝度信号を取得し、前記輝度信号に干渉縞モデルとクロストークモデルとの組み合わせを適合(フィッティング)することにより、クロストーク補正係数を一括して算出するクロストーク補正係数算出方法、また、該方法を実行できる装置を提供する。
(もっと読む)
光学式位置検出装置、および表示装置
【課題】少ない部品で複数の対象物体の位置を高い分解能で検出することのでき、さらには、少ない部品で対象物体の三次元座標を高い分解能で検出することのできる光学式位置検出装置を提供すること。
【解決手段】光学式位置検出装置10では、導光部材40、第1検出用光源121および第2検出用光源122を備えた線状光源ユニット13が複数並列配置されており、点灯した線状光源ユニット13が切り換わった際の光検出部30での受光結果によりY軸方向(第1方向)における対象物体Obの位置を検出する。また、第1検出用光源121と第2検出用光源122とが順次点灯した際の光強度分布を利用してX軸方向における対象物体Obの位置を検出する。さらに、第1検出用光源121および第2検出用光源122が同時点灯した際の光強度分布を利用してZ軸方向における対象物体Obの位置を検出する。
(もっと読む)
レーザ画像計測装置
【課題】環境変化に左右されない正確な測距値を取得可能なレーザ画像計測装置を得る。
【解決手段】レーザ光の発振時間と反射光の受光時間との時間差に基づき対象物までの距離を導出するために、基準となる変調信号Mを生成する基準信号発生部20と、変調信号Mにより変調されたレーザ光を出射するレーザ光送信部30と、レーザ光を走査して整形された送信ビームLを出射するレーザ光走査部40と、反射光を受信信号に変換する受信部50と、レーザ光走査部40内のレーザ光走査光学系5から基準固定距離に設置されて送信ビームLが照射される基準反射板6と、受信信号から基準反射板6および対象物の距離値Dzを導出する信号処理部60と、を備える。レーザ光走査部40および受信部50は、基準反射板6からの反射光を、対象物に対する距離測定と同一の光路で送受信する。信号処理部60は、基準反射板6の距離変動量ΔDzから、対象物の距離値を補正する。
(もっと読む)
反射型フォトセンサを用いた位置検出装置
【課題】磁気センサや大型マグネットを用いることなく、簡単かつ小型な構成で、1mm以上の位置センシングが良好にでき、また高い分解能の検出が可能となるようにする。
【解決手段】発光素子9と受光素子10を有する反射型フォトセンサ7、移動方向に対し上り傾斜Ka及び下り傾斜Kbを有する形状が形成された反射板8を備え、上記受光素子10では、検出出力が反射板8の移動量に応じて直線的に変化するように、移動方向の中心部から両端へ向かう程、単位長さ当りの面積が広くなる受光領域を設け、上記反射板8をフォトセンサ7の発光/受光面SLに略平行で、かつ発光素子9と受光素子10を結ぶ方向に略垂直となる方向に移動するように配置する。これにより、長い距離でリニアリティがあり、高分解能の検出ができる。
(もっと読む)
1 - 20 / 146
[ Back to top ]