
三次元データ処理装置、方法及びプログラム
【課題】建造物を現物計測して得た点群データを、各構成部品に切り分けて、三次元座標上で操作可能とする三次元データ処理技術を提供する。
【解決手段】三次元データ処理装置は、取得した点群データ51及びCADデータを三次元座標に重ね合わせる重ね合わせ部と、CADデータのCAD部品に対応する点群データ51のセグメント55(55a〜55h)を抽出するセグメント抽出部と、三次元座標においてセグメント55(55a〜55h)を操作するセグメント操作部と、を備える。
【解決手段】三次元データ処理装置は、取得した点群データ51及びCADデータを三次元座標に重ね合わせる重ね合わせ部と、CADデータのCAD部品に対応する点群データ51のセグメント55(55a〜55h)を抽出するセグメント抽出部と、三次元座標においてセグメント55(55a〜55h)を操作するセグメント操作部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、建造物をレーザスキャンして得た三次元画像を処理する三次元データ処理技術に関する。
【背景技術】
【0002】
レーザスキャンにより建造物を現物計測し、三次元位置データの集合である点群データによりこの建造物の表面形状を認識する技術が知られている。さらにこの技術は、レーザスキャナを配置する基準点を複数とり、それぞれ取得した点群データを合成し、プラント、作業現場、街並、文化財建造物等といった大規模で複雑な形態を三次元情報化することに応用される。
【0003】
ところで、各種産業のプラントなどの建造物では、補修工事、改造工事、増設工事が頻繁に行われる。これらの諸工事では、機器や材料などの物品を建造物の内部や外部に搬送する作業が発生する。
これら物品の搬送方法の検討は、設計情報の集大成である三次元CADデータを用い、計算機上のシミュレーションにより実施している(例えば、特許文献1参照)。
【0004】
しかし、建造物と三次元CADデータの間において形状上の差異がある場合があり、また当初同じであっても補修工事などを経て形状が変化する場合もある。このために、設計当初の三次元CADデータのみでは、物品の搬送シミュレーションを、正確に実施できないおそれがある。そこで、建造物をレーザスキャン等により現物計測した点群データと、三次元CADデータとを合成することにより、物品の搬送シミュレーションの正確性を向上させる技術が開示されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−211736号公報
【特許文献2】特開2005−181131号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、建造物を現物計測した点群データは、連続した一つのデータ群であるために、構成部品(配管、機器等)の個々の属性(大きさ、形状等)を考慮したうえで、搬送シミュレーションを検討することが困難であった。
また、物品搬送の進展に伴って刻々と変化する建造物の状態に、点群データの画像表示を、追随させることが困難であった。
【0007】
本発明はこのような事情を考慮してなされたもので、建造物を現物計測して得た点群データを、各構成部品に切り分けて、三次元座標上で操作可能とする三次元データ処理技術を提供することを目的とする。
【課題を解決するための手段】
【0008】
三次元データ処理装置において、取得した点群データ及びCADデータを三次元座標に重ね合わせる重ね合わせ部と、前記CADデータのCAD部品に対応する点群データのセグメントを抽出するセグメント抽出部と、前記三次元座標において前記セグメントを操作するセグメント操作部と、を備えることを特徴とする。
【発明の効果】
【0009】
本発明により、建造物を現物計測して得た点群データを、各構成部品に切り分けて、三次元座標上で操作可能とする三次元データ処理技術が提供される。
【図面の簡単な説明】
【0010】
【図1】本発明に係る三次元データ処理装置の実施形態を示すブロック図。
【図2】点群データの表示画像。
【図3】各種CAD部品から構成されるCADデータの表示画像。
【図4】点群データ及びCADデータの合成画像。
【図5】各種CAD部品に対応するセグメントに切り分けられた点群データの表示画像。
【図6】点群データの一部のセグメントがCAD部品に変換された状態を示す表示画像。
【図7】構成部品の一部を外部に搬送するシミュレーションを示す表示画像。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態を添付図面に基づいて説明する。
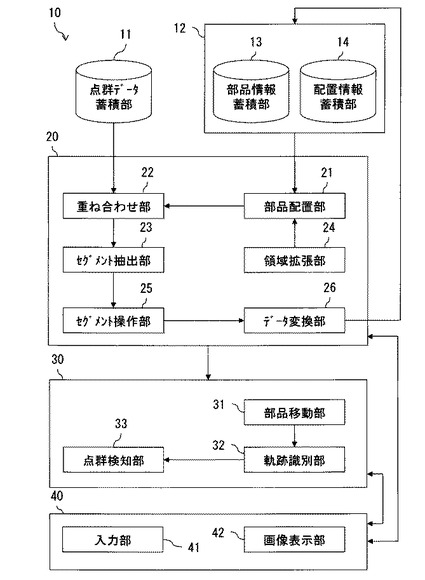
図1に示すように、三次元データ処理装置10は、取得した点群データ51(図2)及びCADデータ52(図3)を三次元座標に重ね合わせる重ね合わせ部22(適宜図4参照)と、CADデータ52のCAD部品53(53a〜53h)(図3)に対応する点群データ51のセグメント55(55a〜55h)(図5)を抽出するセグメント抽出部23と、三次元座標においてセグメント55(55a〜55h)を操作するセグメント操作部25と、を備える。
【0012】
点群データ蓄積部11に蓄積されている点群データ51(図2)は、建造物の表面をスキャンしたレーザの反射光により現物計測されたこの建造物の三次元像のデータファイルである。一つの点群データ51は、複数の基準点のレーザスキャンにより得た三次元像の各々を合成したもので、一つの基準点当り数千万点ものピクセルで構成されている。
なお、図2,4,5,6,7に示されるドットは、三次元像のピクセルを模擬したものであるが、実際のピクセルは、図示されるようなドット状に視認されるとは限らない。
【0013】
CADデータ蓄積部12は、種々のCAD部品53(図3)及びこれらの属性情報16が蓄積される部品情報蓄積部13と、三次元座標におけるCAD部品53の配置データが蓄積される配置情報蓄積部14とから構成されている。
CAD部品53は、配管等の汎用部品については、形状、管径、長さ、材質等の規格化されたものが登録されており、複雑な形状を有する機器については、抽象像(例えば、符号53g)に置き換える場合がある。ここで属性情報16は、CAD部品53の各々に付随する各種情報(部品番号等)である。
【0014】
データ処理部20は、ヒューマンインターフェース部40の入力部41からの入力情報に応じて、これら蓄積部11,12から点群データ51及びCADデータ52を取得し、各種処理を行った後に、画像表示部42に建造物の三次元画像を表示させるものである。
【0015】
部品配置部21は、部品情報蓄積部13から取得したCAD部品53を、配置情報蓄積部14から取得した配置データに基づき配置して、三次元座標に建造物のCADデータ52を形成するものである(図3)。
重ね合わせ部22は、多数のピクセルの集合体である点群データ51(図2)と、複数のCAD部品53の配列したCADデータ52(図3)とを三次元座標に重ね合わせるものである。
【0016】
画像表示部42において点群データ51(図2)及びCADデータ52(図3)の重ね合わせ画像が表示される。一般に、建造物の建設前に作成されているCADデータ52と、建設後の時間が経過した建造物を示す点群データ51とでは、修理や改築等の実施により一致しないことがある。
【0017】
セグメント抽出部23により、CAD部品53(53a〜53h)(図3)に対応する点群データ51のセグメント55(55a〜55h)(図5)を抽出する具体的方法は、いくつか挙げられる。
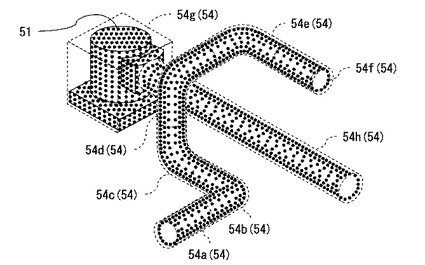
領域拡張部24は、CAD部品53の占有領域(図3の実線部)を拡張させた拡張領域54(図4の破線部)を設定するものである。これにより、拡張領域54(54a〜54h)に含まれる点群データ51がセグメント55(55a〜55h)として抽出される。
他の方法として、CAD部品53の表面座標から最小距離をとる点群データ51の部分を、セグメント55(55a〜55h)として抽出することもできる。
【0018】
セグメント操作部25は、図5に示すように、指定したセグメント55dを三次元座標で移動操作することにより、その背後に隠れていたセグメント55g,55hの画像を表示させることができる。その他に、セグメント操作部25は、指定したセグメント55の削除、拡大、縮小、回転、色彩変更等の操作を実行することができる。
これにより、建造物から設備を搬送するシミュレーションを行う場合、点群データ51のセグメント55を操作することにより作業途中の建造物内の状態を忠実に再現することができる。
【0019】
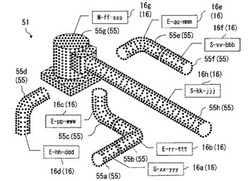
画像表示部42には、図3に示すようにCAD部品53の属性情報16(16a〜16h)を表示させることができるが、図5に示すように、抽出したセグメント55(55a〜55h)に対しても割り付け表示することができる。
このように点群データ51のセグメント55についても、属性情報16を参照することができ、建造物の現状把握の視認性が向上する。
【0020】
データ変換部26は、セグメント55をCAD部品53に変換するものである。
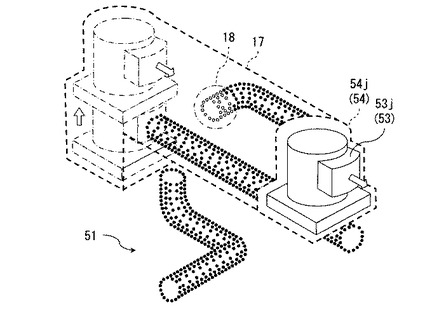
これにより、抽象像のCAD部品53g(図3)で表された複雑形状機器は、図6に示すように、現物形状に忠実なCAD部品53jとして表される。
なお、セグメント55に付随していた属性情報16は、データ変換されたCAD部品53に、そのまま引き継ぎすることができる。
【0021】
図1に示される移動解析部30は、CAD部品53又はセグメント55もしくはこれらの拡張領域54を三次元座標で移動させる部品移動部31と、この三次元座標における部品移動の軌跡領域17を識別する軌跡識別部32と、軌跡領域17と点群データ51との重複部分18を検知する点群検知部33とから構成されている。
【0022】
図6,図7を参照しつつ、プラントにおける各種工事において、建造物内の固定物と搬送物との干渉検証を主目的とした搬送シミュレーションを例示する。
原子力プラント等における各種工事においては、建造物内に緻密に配置された配管や機器の搬送シミュレーションを高精度化することが求められている。
【0023】
領域拡張部24は、図6に示すように、移動対象となる部品53jに対し、大きめのオフセットを有する拡張領域54jを設定する。このオフセットは、部品53jを移動させる支持部材の設置スペースや、他の部品53との接触を回避するための余裕代を見込んで設定する。
そして、部品移動部31において設定した搬送経路に沿って、この部品53j及び拡張領域54jが、三次元座標を移動する。
【0024】
軌跡識別部32は、搬送経路に沿って移動する部品53j及び/又はその拡張領域54jの軌跡を包絡した軌跡領域17を生成する。
部品の軌跡領域17と建造物の点群データ51との重複を検証することによって、搬送時に干渉する対象物を特定することができ、より効率的で安全性に優れた部品の搬送プランを作成することができる。
【0025】
点群検知部33は、点群データ51のうち軌跡領域17の内部に含まれる重複部分18を判定する。この重複部分18のうち拡張領域54jが重なる領域は、当該部品53jの搬送時に干渉する危険性の高い部分であり、部品53jが重なる部分は確実に干渉して搬送の妨げになる部分と判定される。
画像表示部42では、この重複部分18のうち、干渉する部分及び干渉の危険性のある部分を色分け表示するとともに、干渉する部品の属性情報16を表示する。これにより、干渉物のリストアップが容易になる。
【0026】
以上述べた少なくともひとつの実施形態の三次元データ処理装置によれば、現物計測による点群データで表された建造物の三次元画像が構成部品を単位として操作されるために、精度の高い構成部品の搬送シミュレーションが可能になる。
【0027】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
また、三次元データ処理装置は、コンピュータによって各手段を実現することも可能であり、各機能プログラムを結合した三次元データ処理プログラムにより動作させることができる。
【符号の説明】
【0028】
10…三次元データ処理装置、11…点群データ蓄積部、12…CADデータ蓄積部、13…部品情報蓄積部、14…配置情報蓄積部、16…属性情報、17…軌跡領域、18…重複部分、20…データ処理部、21…部品配置部、22…重ね合わせ部、23…セグメント抽出部、24…領域拡張部、25…セグメント操作部、26…データ変換部、30…移動解析部、31…部品移動部、32…軌跡識別部、33…点群検知部、40…ヒューマンインターフェース部、41…入力部、42…画像表示部、51…点群データ、52…CADデータ、53(53a〜53j)…CAD部品、54(54a〜54j)…拡張領域、55(55a〜55h)…セグメント。
【技術分野】
【0001】
本発明は、建造物をレーザスキャンして得た三次元画像を処理する三次元データ処理技術に関する。
【背景技術】
【0002】
レーザスキャンにより建造物を現物計測し、三次元位置データの集合である点群データによりこの建造物の表面形状を認識する技術が知られている。さらにこの技術は、レーザスキャナを配置する基準点を複数とり、それぞれ取得した点群データを合成し、プラント、作業現場、街並、文化財建造物等といった大規模で複雑な形態を三次元情報化することに応用される。
【0003】
ところで、各種産業のプラントなどの建造物では、補修工事、改造工事、増設工事が頻繁に行われる。これらの諸工事では、機器や材料などの物品を建造物の内部や外部に搬送する作業が発生する。
これら物品の搬送方法の検討は、設計情報の集大成である三次元CADデータを用い、計算機上のシミュレーションにより実施している(例えば、特許文献1参照)。
【0004】
しかし、建造物と三次元CADデータの間において形状上の差異がある場合があり、また当初同じであっても補修工事などを経て形状が変化する場合もある。このために、設計当初の三次元CADデータのみでは、物品の搬送シミュレーションを、正確に実施できないおそれがある。そこで、建造物をレーザスキャン等により現物計測した点群データと、三次元CADデータとを合成することにより、物品の搬送シミュレーションの正確性を向上させる技術が開示されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−211736号公報
【特許文献2】特開2005−181131号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、建造物を現物計測した点群データは、連続した一つのデータ群であるために、構成部品(配管、機器等)の個々の属性(大きさ、形状等)を考慮したうえで、搬送シミュレーションを検討することが困難であった。
また、物品搬送の進展に伴って刻々と変化する建造物の状態に、点群データの画像表示を、追随させることが困難であった。
【0007】
本発明はこのような事情を考慮してなされたもので、建造物を現物計測して得た点群データを、各構成部品に切り分けて、三次元座標上で操作可能とする三次元データ処理技術を提供することを目的とする。
【課題を解決するための手段】
【0008】
三次元データ処理装置において、取得した点群データ及びCADデータを三次元座標に重ね合わせる重ね合わせ部と、前記CADデータのCAD部品に対応する点群データのセグメントを抽出するセグメント抽出部と、前記三次元座標において前記セグメントを操作するセグメント操作部と、を備えることを特徴とする。
【発明の効果】
【0009】
本発明により、建造物を現物計測して得た点群データを、各構成部品に切り分けて、三次元座標上で操作可能とする三次元データ処理技術が提供される。
【図面の簡単な説明】
【0010】
【図1】本発明に係る三次元データ処理装置の実施形態を示すブロック図。
【図2】点群データの表示画像。
【図3】各種CAD部品から構成されるCADデータの表示画像。
【図4】点群データ及びCADデータの合成画像。
【図5】各種CAD部品に対応するセグメントに切り分けられた点群データの表示画像。
【図6】点群データの一部のセグメントがCAD部品に変換された状態を示す表示画像。
【図7】構成部品の一部を外部に搬送するシミュレーションを示す表示画像。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態を添付図面に基づいて説明する。
図1に示すように、三次元データ処理装置10は、取得した点群データ51(図2)及びCADデータ52(図3)を三次元座標に重ね合わせる重ね合わせ部22(適宜図4参照)と、CADデータ52のCAD部品53(53a〜53h)(図3)に対応する点群データ51のセグメント55(55a〜55h)(図5)を抽出するセグメント抽出部23と、三次元座標においてセグメント55(55a〜55h)を操作するセグメント操作部25と、を備える。
【0012】
点群データ蓄積部11に蓄積されている点群データ51(図2)は、建造物の表面をスキャンしたレーザの反射光により現物計測されたこの建造物の三次元像のデータファイルである。一つの点群データ51は、複数の基準点のレーザスキャンにより得た三次元像の各々を合成したもので、一つの基準点当り数千万点ものピクセルで構成されている。
なお、図2,4,5,6,7に示されるドットは、三次元像のピクセルを模擬したものであるが、実際のピクセルは、図示されるようなドット状に視認されるとは限らない。
【0013】
CADデータ蓄積部12は、種々のCAD部品53(図3)及びこれらの属性情報16が蓄積される部品情報蓄積部13と、三次元座標におけるCAD部品53の配置データが蓄積される配置情報蓄積部14とから構成されている。
CAD部品53は、配管等の汎用部品については、形状、管径、長さ、材質等の規格化されたものが登録されており、複雑な形状を有する機器については、抽象像(例えば、符号53g)に置き換える場合がある。ここで属性情報16は、CAD部品53の各々に付随する各種情報(部品番号等)である。
【0014】
データ処理部20は、ヒューマンインターフェース部40の入力部41からの入力情報に応じて、これら蓄積部11,12から点群データ51及びCADデータ52を取得し、各種処理を行った後に、画像表示部42に建造物の三次元画像を表示させるものである。
【0015】
部品配置部21は、部品情報蓄積部13から取得したCAD部品53を、配置情報蓄積部14から取得した配置データに基づき配置して、三次元座標に建造物のCADデータ52を形成するものである(図3)。
重ね合わせ部22は、多数のピクセルの集合体である点群データ51(図2)と、複数のCAD部品53の配列したCADデータ52(図3)とを三次元座標に重ね合わせるものである。
【0016】
画像表示部42において点群データ51(図2)及びCADデータ52(図3)の重ね合わせ画像が表示される。一般に、建造物の建設前に作成されているCADデータ52と、建設後の時間が経過した建造物を示す点群データ51とでは、修理や改築等の実施により一致しないことがある。
【0017】
セグメント抽出部23により、CAD部品53(53a〜53h)(図3)に対応する点群データ51のセグメント55(55a〜55h)(図5)を抽出する具体的方法は、いくつか挙げられる。
領域拡張部24は、CAD部品53の占有領域(図3の実線部)を拡張させた拡張領域54(図4の破線部)を設定するものである。これにより、拡張領域54(54a〜54h)に含まれる点群データ51がセグメント55(55a〜55h)として抽出される。
他の方法として、CAD部品53の表面座標から最小距離をとる点群データ51の部分を、セグメント55(55a〜55h)として抽出することもできる。
【0018】
セグメント操作部25は、図5に示すように、指定したセグメント55dを三次元座標で移動操作することにより、その背後に隠れていたセグメント55g,55hの画像を表示させることができる。その他に、セグメント操作部25は、指定したセグメント55の削除、拡大、縮小、回転、色彩変更等の操作を実行することができる。
これにより、建造物から設備を搬送するシミュレーションを行う場合、点群データ51のセグメント55を操作することにより作業途中の建造物内の状態を忠実に再現することができる。
【0019】
画像表示部42には、図3に示すようにCAD部品53の属性情報16(16a〜16h)を表示させることができるが、図5に示すように、抽出したセグメント55(55a〜55h)に対しても割り付け表示することができる。
このように点群データ51のセグメント55についても、属性情報16を参照することができ、建造物の現状把握の視認性が向上する。
【0020】
データ変換部26は、セグメント55をCAD部品53に変換するものである。
これにより、抽象像のCAD部品53g(図3)で表された複雑形状機器は、図6に示すように、現物形状に忠実なCAD部品53jとして表される。
なお、セグメント55に付随していた属性情報16は、データ変換されたCAD部品53に、そのまま引き継ぎすることができる。
【0021】
図1に示される移動解析部30は、CAD部品53又はセグメント55もしくはこれらの拡張領域54を三次元座標で移動させる部品移動部31と、この三次元座標における部品移動の軌跡領域17を識別する軌跡識別部32と、軌跡領域17と点群データ51との重複部分18を検知する点群検知部33とから構成されている。
【0022】
図6,図7を参照しつつ、プラントにおける各種工事において、建造物内の固定物と搬送物との干渉検証を主目的とした搬送シミュレーションを例示する。
原子力プラント等における各種工事においては、建造物内に緻密に配置された配管や機器の搬送シミュレーションを高精度化することが求められている。
【0023】
領域拡張部24は、図6に示すように、移動対象となる部品53jに対し、大きめのオフセットを有する拡張領域54jを設定する。このオフセットは、部品53jを移動させる支持部材の設置スペースや、他の部品53との接触を回避するための余裕代を見込んで設定する。
そして、部品移動部31において設定した搬送経路に沿って、この部品53j及び拡張領域54jが、三次元座標を移動する。
【0024】
軌跡識別部32は、搬送経路に沿って移動する部品53j及び/又はその拡張領域54jの軌跡を包絡した軌跡領域17を生成する。
部品の軌跡領域17と建造物の点群データ51との重複を検証することによって、搬送時に干渉する対象物を特定することができ、より効率的で安全性に優れた部品の搬送プランを作成することができる。
【0025】
点群検知部33は、点群データ51のうち軌跡領域17の内部に含まれる重複部分18を判定する。この重複部分18のうち拡張領域54jが重なる領域は、当該部品53jの搬送時に干渉する危険性の高い部分であり、部品53jが重なる部分は確実に干渉して搬送の妨げになる部分と判定される。
画像表示部42では、この重複部分18のうち、干渉する部分及び干渉の危険性のある部分を色分け表示するとともに、干渉する部品の属性情報16を表示する。これにより、干渉物のリストアップが容易になる。
【0026】
以上述べた少なくともひとつの実施形態の三次元データ処理装置によれば、現物計測による点群データで表された建造物の三次元画像が構成部品を単位として操作されるために、精度の高い構成部品の搬送シミュレーションが可能になる。
【0027】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、特許請求の範囲に記載された発明とその均等の範囲に含まれるものである。
また、三次元データ処理装置は、コンピュータによって各手段を実現することも可能であり、各機能プログラムを結合した三次元データ処理プログラムにより動作させることができる。
【符号の説明】
【0028】
10…三次元データ処理装置、11…点群データ蓄積部、12…CADデータ蓄積部、13…部品情報蓄積部、14…配置情報蓄積部、16…属性情報、17…軌跡領域、18…重複部分、20…データ処理部、21…部品配置部、22…重ね合わせ部、23…セグメント抽出部、24…領域拡張部、25…セグメント操作部、26…データ変換部、30…移動解析部、31…部品移動部、32…軌跡識別部、33…点群検知部、40…ヒューマンインターフェース部、41…入力部、42…画像表示部、51…点群データ、52…CADデータ、53(53a〜53j)…CAD部品、54(54a〜54j)…拡張領域、55(55a〜55h)…セグメント。
【特許請求の範囲】
【請求項1】
取得した点群データ及びCADデータを三次元座標に重ね合わせる重ね合わせ部と、
前記CADデータのCAD部品に対応する点群データのセグメントを抽出するセグメント抽出部と、
前記三次元座標において前記セグメントを操作するセグメント操作部と、を備えることを特徴とする三次元データ処理装置。
【請求項2】
請求項1に記載の三次元データ処理装置において、
前記CAD部品の占有領域を拡張させた拡張領域を設定する領域拡張部を備え、
前記拡張領域に含まれる点群データが前記セグメントとして抽出されることを特徴とする三次元データ処理装置。
【請求項3】
請求項1又は請求項2に記載の三次元データ処理装置において、
前記CAD部品の属性情報が対応する前記セグメントに割り付けられることを特徴とする三次元データ処理装置。
【請求項4】
請求項1から請求項3のいずれか1項に記載の三次元データ処理装置において、
前記セグメントを前記CAD部品に変換するデータ変換部を備えることを特徴とする三次元データ処理装置。
【請求項5】
請求項1から請求項4のいずれか1項に記載の三次元データ処理装置において、
前記CAD部品又は前記セグメントもしくはこれらの前記拡張領域を前記三次元座標で移動させたときの軌跡領域を識別する軌跡識別部を備えることを特徴とする三次元データ処理装置。
【請求項6】
請求項5に記載の三次元データ処理装置において、
前記軌跡領域と前記点群データとの重複部分を検知する点群検知部を備えることを特徴とする三次元データ処理装置。
【請求項7】
取得した点群データ及びCADデータを三次元座標に重ね合わせるステップと、
前記CADデータのCAD部品に対応する点群データのセグメントを抽出するステップと、
前記三次元座標において前記セグメントを操作するステップと、を含むことを特徴とする三次元データ処理方法。
【請求項8】
コンピュータに、
取得した点群データ及びCADデータを三次元座標に重ね合わせるステップ、
前記CADデータのCAD部品に対応する点群データのセグメントを抽出するステップ、
前記三次元座標において前記セグメントを操作するステップ、を実行させることを特徴とする三次元データ処理プログラム。
【請求項1】
取得した点群データ及びCADデータを三次元座標に重ね合わせる重ね合わせ部と、
前記CADデータのCAD部品に対応する点群データのセグメントを抽出するセグメント抽出部と、
前記三次元座標において前記セグメントを操作するセグメント操作部と、を備えることを特徴とする三次元データ処理装置。
【請求項2】
請求項1に記載の三次元データ処理装置において、
前記CAD部品の占有領域を拡張させた拡張領域を設定する領域拡張部を備え、
前記拡張領域に含まれる点群データが前記セグメントとして抽出されることを特徴とする三次元データ処理装置。
【請求項3】
請求項1又は請求項2に記載の三次元データ処理装置において、
前記CAD部品の属性情報が対応する前記セグメントに割り付けられることを特徴とする三次元データ処理装置。
【請求項4】
請求項1から請求項3のいずれか1項に記載の三次元データ処理装置において、
前記セグメントを前記CAD部品に変換するデータ変換部を備えることを特徴とする三次元データ処理装置。
【請求項5】
請求項1から請求項4のいずれか1項に記載の三次元データ処理装置において、
前記CAD部品又は前記セグメントもしくはこれらの前記拡張領域を前記三次元座標で移動させたときの軌跡領域を識別する軌跡識別部を備えることを特徴とする三次元データ処理装置。
【請求項6】
請求項5に記載の三次元データ処理装置において、
前記軌跡領域と前記点群データとの重複部分を検知する点群検知部を備えることを特徴とする三次元データ処理装置。
【請求項7】
取得した点群データ及びCADデータを三次元座標に重ね合わせるステップと、
前記CADデータのCAD部品に対応する点群データのセグメントを抽出するステップと、
前記三次元座標において前記セグメントを操作するステップと、を含むことを特徴とする三次元データ処理方法。
【請求項8】
コンピュータに、
取得した点群データ及びCADデータを三次元座標に重ね合わせるステップ、
前記CADデータのCAD部品に対応する点群データのセグメントを抽出するステップ、
前記三次元座標において前記セグメントを操作するステップ、を実行させることを特徴とする三次元データ処理プログラム。
【図1】


【図2】

【図3】

【図4】
【図5】

【図6】

【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−80391(P2013−80391A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2011−220263(P2011−220263)
【出願日】平成23年10月4日(2011.10.4)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成23年10月4日(2011.10.4)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]