
Fターム[2B033AB11]の内容
土作業機(ロータリ) (5,852) | 配置による型式 (1,512) | 単軸型 (691)
Fターム[2B033AB11]に分類される特許
61 - 80 / 691
歩行型作業機
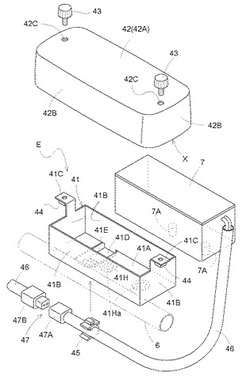
【課題】バッテリーの取り扱いを容易にする歩行型作業機を構成する。
【解決手段】エンジンを備えた機体から後方に左右のハンドル杆6が延設され、一方のハンドル杆6に操作レバーを有する作業操作部を備え、他方のハンドル杆6にはスタータモータに電力を供給するバッテリー7を有する電源部Eを備えた。電源部Eは、バッテリー7を嵌め込まれるケース41と、このケース41の上方を覆うバッテリーカバー42とを有し、バッテリーカバー42をケース41の後端から後方に張り出したオーバーハング部Xからハーネス46を後方に引き出し、このハーネス46をケース41の下方からハンドル杆6に沿って配置した。
(もっと読む)
ロータリ耕耘機

【課題】 構成部材が少なく構造が簡単で製造費が安上がりになり、しかも支持フレームの高さ設定を容易にすることができるロータリ耕耘機を提供する。
【解決手段】 支持フレーム9には、左右一対の揺動アーム81と、接地部材7,8を支持するツールバー83とが備えられ、一方の揺動アーム81に支持フレーム9の揺動高さを示す目盛り96が前後方向に設けられ、枢支軸84の上方位置の機枠4に連動杆98の前上側が左右方向の支軸99廻りに上下揺動自在に支持され、連動杆98の後下側には、左右方向に屈曲されかつ前記一方の揺動アーム81に上側から接当される接当部101が形成され、かつ接当部101自体に又はその近辺に目盛り96と対向する指標部101aが形成され、前記指標部101aが揺動アーム81の上下揺動に連動して前記目盛り96に沿って前後に移動自在とされている。
(もっと読む)
ロータリ耕耘装置
【課題】均平作業を行う際の平板の交換作業を行う必要のないロータリ耕耘装置を提供すること。
【解決手段】可撓性を有し、且つその上端部がロータリ耕耘装置8のカバー11の後端部に上下に揺動可能に連結されている平板18と、平板18の後方に配置され、ロータリ耕耘装置8のカバー11の後端部に上下に揺動可能に連結されている硬質の整地板20と、平板18と整地板20とを解除自在に接続する接続手段25,28と、整地板20を平板18から後方又は上方に離れた姿勢に解除自在に保持する保持手段14a,24とを備える。
(もっと読む)
歩行型耕耘機
【課題】
操作ハンドルを前後方向に反転可能に構成し、通常の耕耘作業時には機体後側に把持部を位置させ、畝立て作業あるいは溝堀作業時は機体前側に位置するよう反転する耕耘機において、畝立て作業時あるいは溝堀作業時の操作性を良好にしながら溝堀能力を向上させること課題とする。
【解決手段】
走行車輪(4)と、耕耘爪(5)と、操作ハンドル(8)を備えた歩行型耕耘機において、走行車輪(4)の後側に耕耘爪(5)を配置し、操作ハンドル(8)の把持部(11)を機体後側又は機体前側に反転可能にすべく操作ハンドル(8)の基部(13)を縦軸心周りに前後方向に回動可能に構成し、操作ハンドル(8)の把持部(11)が機体前側に位置するときに、操作ハンドル(8)の基部の取付位置を耕耘爪(5)側に移動可能に構成したことを特徴とする。
(もっと読む)
農作業機
【課題】作業者への負担を軽減できる農作業機を提供する。
【解決手段】農作業機1は、トラクタに連結する機体2を備える。機体2には、伝動ケース体11を回動可能に設ける。伝動ケース体11の下部には、耕耘爪23を有する耕耘体21を回転可能に設ける。伝動ケース体11には、耕耘体21を覆う回動カバー体31を回動可能に設ける。農作業機1が作業状態から非作業状態になる際に、伝動ケース体11が機体2に対して回動しかつ回動カバー体31が伝動ケース体11に対して回動する。その結果、回動カバー体31と耕耘爪23との間の距離が減少する。
(もっと読む)
歩行型管理機
【課題】
操作ハンドル17を取外すことなくコンパクトに収納することができる歩行型管理機1を提供する。
【解決手段】
ロータリ耕耘装置19を備えた歩行型管理機1において、ハンドルフレーム16をミッションケース2から後部上方に向かって延設して形成すると共に、前記ロータリ耕耘装置19に近接した位置に操作ハンドル17の収納位置P2を設け、操作ハンドル17の先端側を操作ハンドル17の中途部から下方へ屈曲させた操作ハンドル17を、作業時に使用する作業位置から下方に向けて回動させて、収納位置P2に固定可能とした。
(もっと読む)
農作業機
【課題】トラクタに装着して農作業を行う農作業機であって、アクチュエータの作動により途中に介在するクラッチ等の破損を防止する農作業機を提供することを目的とする。
【解決手段】トラクタ1に装着して、トラクタ1からの動力を入力軸51を介して伝達し中間にクラッチ82、83を設けた伝動部で伝達して農作業を行い、クラッチ82、83を介して接続されている農作業機の一部をアクチュエータ22により動かすことが可能な農作業機において、クラッチ82、83より動力源側の伝動部の回転を検知するセンサ24と、アクチュエータ22を操作するための操作部15と、制御部21とを有し、制御部21は、操作部15からアクチュエータ22を作動させる操作信号を受信し、かつ、センサ24が回転を検知していない場合、アクチュエータ22を作動させる。
(もっと読む)
歩行型電動耕耘機及び運転制御方法
【課題】耕耘作業中に電動モータに大きな負荷がかかったとき電動耕耘機の挙動が不安定になることを極力防止し、その制御を自動で行うようにして、操作性を改善した歩行型電動耕耘機の運転制御方法を提供する。
【解決手段】耕耘作業中において、電動モータ(2)にかかる負荷を検出し、該負荷が所要の閾値以上であるときは、前記電動モータ(2)を通常回転又は低速回転から停止させ、前記負荷が所要の閾値未満であるときは、電動モータ(2)を通常回転から低速回転に切り替える歩行型電動耕耘機の運転制御方法。
(もっと読む)
ロータリ作業機
【課題】チェーンケースによって形成された溝を埋めることが可能なロータリ作業機を提供すること。
【解決手段】ロータリ作業機10は、作業ロータ5と、作業ロータ5の上側方向を覆うシールドカバー本体部2と、シールドカバー本体部2の耕耘方向の反対側位置に接続され、作業ロータ5の耕耘方向の反対側を覆うエプロン部材1と、エプロン部材1の左側方向位置又は右側方向位置に接続されたエプロンサイドプレート19と、を有し、エプロンサイドプレート19は、エプロン部材1との接続状態を第1の状態から第2の状態へ変化させることで、エプロンサイドプレート19の下側方向位置に開口部Kを形成可能としている。
(もっと読む)
回転軸を角度調節可能なロータリ装置
【課題】 畝間の盛り土を崩さず、また崩す場合は、崩す土量を調節し耕耘できるよう、二本の回転軸を上下かつ前後方向に、角度調節が可能なロータリ装置を提供する。
【解決手段】 土作業のロータリ耕耘部の駆動軸1の上方部に、そこへの装着を兼ねるフレーム2を設けると共に、その左右両端に二本の回転軸となるよう、前後調節フレーム4を設け、そこに上下調節レバー6を、係止ピン7とスナップピンを用いて連結し、上下調節レバー6の下部に回転軸受け部11を配し、回転軸14の一端15を回転軸受け部11に嵌め込み、ロータリ駆動軸1側の回転軸14のもう一端16に、ユニバーサルジョイント17を設け、駆動軸1の貫通穴とユニバーサルジョイントの貫通穴をクレビスピンとスナップピンを用いて留めた回転軸を角度調節可能なロータリ装置を特徴とする。
(もっと読む)
畝立施肥装置
【課題】 部分耕耘施肥において、畝断面にほぼ均一に施用剤を散布しようとする。
【解決手段】トラクタ車体1の後方に耕耘ロータリ6と耕耘土壌を受けて畝成形する畝成形器7を装着し、耕耘ロータリ6の耕耘軸15には複数の耕耘爪23,23…と畝成形器7で成形する畝の畝幅間で対応する対のディスク25,25を配設し、この対向するディスク25,25間またはその前方において繰り出された粉・粒状施用剤を土壌と共に攪拌する畝立施肥装置において、前記畝成形器7による畝の幅方向であって前記対のディスク25,25間に粉粒状物を拡散するディスク間拡散手段Kを設け、該拡散散布量を当該幅方向において異なる量に設定することで、耕耘爪で土寄せされてもディスク25,25間幅方向においてほぼ均一に施肥又は施薬できる。
(もっと読む)
代掻き作業機
【課題】圃場外周部(隅部)に溜まろうとする土を掻き均すことができる代掻き作業機を提供する。
【解決手段】代掻き作業機100を、走行機体Tに連結される主作業機部分100aと、主作業機部分100aに対して水平に回動可能に支持された副作業機部分100bとに2分割形成すると共に、副作業機部分100bを回動させてその前面を斜め前方機体外側に向ける油圧シリンダ6を設けるようにする。副作業機部分100bは、その前面を斜め機体外側に向けた状態で前進した際に前方から後方に至る水流を主作業機部分寄りに流すので、圃場外周部(隅部)に溜まろうとする土を容易に掻き均すことができるようになる。
(もっと読む)
ロータリ作業機のロータリカバー
【課題】シールドカバーの作業ロータ側に面に付着した土砂、特にシールドカバーに付着防止板(土除け材)が固定された場合の、隣接する付着防止板間に進入した土砂の排出作業性を高める。
【解決手段】トラクタの後部に装着され、トラクタと共に走行する作業機本体10に支持される作業ロータ5とその上方を覆うシールドカバー2を備えるロータリ作業機において、シールドカバー2を周方向に配列する複数枚のカバー材21から構成し、この複数枚のカバー材21の内、周方向に隣接するいずれかのカバー材21、21間に、作業ロータ5が跳ね上げる土砂の排除用の開口21A、21Bを形成する。
複数枚のカバー材21、21の内、少なくともいずれかのカバー材21の作業ロータ5側の面に、1枚以上の土除け材4をその周方向一方側の位置で固定する。
(もっと読む)
草刈機及び草刈用装着具
【課題】効率良く刈草を集めることが可能な草刈機を提供すること。
【解決手段】横軸芯に回転する草刈用の回転刃11と、回転刃11により刈り取られた草を後方へと案内する案内シュート300と、案内シュート300を通過した草を収容する集草部12と、背面から視て、案内シュート300の左右方向の中央部に形成された案内部310とを備え、案内部310は、案内シュートの上部に設けられており、草の案内方向に直交する断面形状は、矩形状であり、案内部310は、矩形状である案内体311を有し、背面側から視て、案内シュート300の草が通過できる部分は、凹形状である、草刈機である。
(もっと読む)
歩行型管理機
【課題】フロントロータリ式とリアロータリ式とでレイアウトを切り替え可能な管理機において、双方のレイアウトにおいて良好な重量バランスを実現する。
【解決手段】管理機10は、操縦ハンドル12と、ウェイトとして機能するバッテリー21と、車輪14と、回転する耕耘爪20を有するロータリ式耕耘装置13と、を備える。また、車輪14とロータリ式耕耘装置13は、車体前後方向に並んで配置されている。操縦ハンドル12は、車体前後方向での方向を転換可能である。そしてバッテリー21の重心21aは、操縦ハンドル12の方向転換操作に伴って、少なくとも車体前後方向での位置を移動する。
(もっと読む)
農作業機
【課題】農作業機を保持するスタンドを、非使用時に、農作業機の昇降の際にトラクタに接触しないように農作業機にコンパクトに収納する。
【解決手段】農業用砕土装置101(農作業機)の機体102は、トラクタ501の後部に装着され、中央作業部104とその左右にある延長作業部105と回動アーム106とを有する。延長作業部105は、中央作業部104の上方位置105Uと中央作業部104の左右の展開位置105Sとの間を動くよう、回動アーム106の回動軸107を中心に折畳まれる。スタンド103は、中央作業部104の下方側に位置して機体102を支持する使用位置103Aと、中央作業部104の上方側に位置して機体102を支持しない非使用位置103Bとに位置付けられる。非使用位置103Bにあるスタンド103は、中央作業部104と延長作業部105と回動アーム106とにより形成された空間領域119内に位置付けられる。
(もっと読む)
耕耘作業機
【課題】延長整地板を安定して格納することができ、延長整地板を折り畳み位置又は展開位置に移動させる操作の操作性がよい耕耘作業機を提供する。
【解決手段】代かき作業機1は、耕耘ロータの上部を覆うシールドカバー左24lの後方に上下方向に回動自在に配設されて耕耘ロータにより耕耘された耕土を整地する第2整地板左28Lと、この進行方向に対して左右方向の端部に前後方向に延設された軸部32を中心として回動自在に支持されて展開時に第2整地板左28Lの側方へ延びて第2整地板左28Lの整地作業を補助する延長整地板左33Lとを備える。延長整地板左33Lは、その延長方向先端部に突出入可能に設けられた延長板左40Lを備える。延長板左40Lは、延長整地板左33Lに重ね合わされた状態で延長整地板左33Lの延長方向先端部から突出する突出位置Pdと、延長整地板左33Lの先端部内側に収まる格納位置に着脱可能に設けられる。
(もっと読む)
歩行型作業機
【課題】軽トラックの荷台などの積み込み先に比較的容易に積み込み、積み降ろしすることの可能な歩行型作業機を提供する。
【解決手段】作業装置を駆動する原動機1と、原動機1の後方向きに延出された操向用ハンドル2Aと、原動機1の前方に配置されたプロテクタとを備え、プロテクタよりも前方に延出する積み込み用アーム5をプロテクタに対して着脱自在に備え、積み込み用アーム5の先端に歩行型作業機の積み込み先20の床面20A上を転動または摺動可能な作用部18(6)が設けられている歩行型作業機とした。
(もっと読む)
耕耘作業機
【課題】土寄せ板を容易に機体に着脱することができ、土寄せ板の装着時に土寄せ板を倉庫等に取りに行く煩わしさがない耕耘作業機を提供する。
【解決手段】代かき作業機1は、車輪を有して走行可能な走行機体の後部に装着され、耕耘ロータ13を回転させながら走行機体の前進走行に伴って進行して圃場を耕耘し、耕耘ロータ13を回転自在に支持する機体5に、走行機体の車輪の通過により圃場表面に形成された凹部に土を寄せることが可能な土寄せ板50が設けられる。土寄せ板50は、凹部に土を寄せるときに装着される機体5の土寄せ位置Psと、土寄せ板50を機体5に格納するときに装着される機体5の格納位置Pkに、選択的に着脱可能に装着される。
(もっと読む)
トラクタの耕深自動制御装置
【課題】本発明では、トラクタの耕深自動制御装置において、安定した耕深を維持して作業を続けられるようにすることを課題とする。
【解決手段】作業機2をリフトアーム17で昇降可能にトラクタ1に装着し、作業機2を昇降するリフトアーム17に設けるリフトアームセンサ30と端部が接地しながら作業機2の対地作業機構20を覆う作業機カバー23の昇降位置を検出するカバーセンサ29を設け、該カバーセンサ29の検出する対地作業機構20の耕深を設定耕深値となるようにカバーセンサ29の検出耕深値に基づくカバー耕深制御を行い、このカバー耕深制御の間にリフトアームセンサ30が検出する作業機位置検出値を制御基準値として記憶し、以後リフトアームセンサ30が検出する作業機位置検出値が制御基準値となるようにリフトアーム耕深制御で昇降制御してなるトラクタの耕深自動制御装置とする。
(もっと読む)
61 - 80 / 691
[ Back to top ]