
Fターム[2B043AA03]の内容
農業機械一般(操向) (6,001) | 用途又は対象 (528) | 操向に関するもの (440)
Fターム[2B043AA03]の下位に属するFターム
操向制御に関するもの (302)
Fターム[2B043AA03]に分類される特許
61 - 80 / 138
乗用型耕耘機
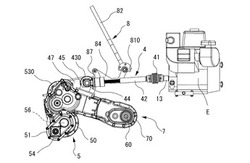
【課題】耕耘用のローターの昇降に伴って各部が動いたり各部の間隔が変化したときに、動力伝達装置がそれらに素早く追従して動くことができるようにしてローターの迅速な昇降操作を可能とした乗用型耕耘機を提供する。
【解決手段】乗用型耕耘機(A)は、前輪と後輪の間に設けられ昇降動可能な耕耘用のローターと、ローターを昇降動させる昇降操作装置(8)と、ローターを駆動する耕耘駆動系(7)と、前輪を駆動する走行駆動系(5)とを有し、走行駆動系(5)と耕耘駆動系(7)には動力伝達装置(4)で原動機(E)の動力が伝えられ、走行駆動系(5)と耕耘駆動系(7)は一体となって回動軸(56)を中心として回動可能で、動力伝達装置(4)は基端がユニバーサルジョイント(41)を介し動力取出軸(13)に接続されている伸縮可能なドライブシャフト(42)と、ドライブシャフト(42)から伝えられる動力を走行駆動系(5)と耕耘駆動系(7)に分配する動力分配軸とを備えている。
(もっと読む)
作業車両

【課題】安全性、旋回性能および作業環境を向上させたトラクタなどの作業車両を提供する。
【解決手段】キャビン6とミッションケース23との間に防振部材10を有し、ステアリングホイール9の操向および操向量を、車両上下方向から車両前後方向に変換するクランク機構111を有するリンク機構100を備え、このリンク機構100によって旋回用HSTポンプ72を操作し、車両を旋回させ、クランク機構111を、ミッションケース23側部に備える。また、クランク機構111の、弾性部材112を内挿する左アーム111cの接続部111dの両端部に、前後ロッド105を接続する。
(もっと読む)
作業車両
【課題】2ポンプ2モータ方式の走行用静油圧式無段変速装置に連係する手動式の走行操作具を備えたクローラトラクタ等の作業車両において、機体に連結した作業機アタッチメントを操作(操縦)しながら、機体を移動走行させるといった複合的な操作を容易に行えるように、手動式の走行操作具と同じ機能を有する簡素且つ安価な構成の足動式の走行操作具を設ける。
【解決手段】走行用静油圧式無段変速装置21に連係する手動式の走行操作具8を、2つの油圧ポンプ20L,20Rの斜板制御用サーボ機構S1,S2の吐出量制御バルブV1、V2に連係させると共に、前記手動式の走行操作具8とは別に足動式の走行操作具32L,32Rを設け、該足動式の走行操作具32L,32Rを、前記斜板制御用サーボ機構S1,S2の斜板コントロール回路中に作用させて、当該足動式の走行操作具32L,32Rによっても走行操作を可能となした。
(もっと読む)
乗用型作業機
【課題】8条植えなどの多条植え用であっても適切な位置で苗の植え付けができる旋回連動制御装置を備えた乗用型作業機を提供すること。
【解決手段】作業装置4を連結した走行車体2に走行距離を検出する走行距離検出手段205を設け、旋回時の走行距離が所定値に達したら、ブザー186が鳴って走行車体2の操向用のハンドル34を例えば90度旋回操作させる、さらに走行距離が所定値に達したら、ブザー186をもう一度鳴らして走行車体2の操向用のハンドル34を、再び例えば90度旋回操作させることができるようにすると、オペレータの操向操作の目安になり、所望の走行経路で旋回でき、8条植えなどの多条植え用の乗用型作業機であっても、前回の植付条に一部重なった状態で苗の植え付けをするおそれなく圃場での旋回が可能となる。
(もっと読む)
農作物栽培用搬送路
【課題】 野菜などの農産物栽培用地は、畝部に苗を植え付け谷部を作業通路としており、資材や農作物の運搬にあたっては前記谷部の作業通路を車輪付運搬機や簡易軌道を使用しているが、農産物の品質管理や運搬作業性の面で問題があった。
【解決手段】 本発明は、畝と畝の谷部に走行レールを置かず、畝部に不透水性の高分子シートを掛け、走行レールを支持する構造を持ちながら荷重を分散する板を畝部の上に置き、この荷重を分散する板に走行レールを固定した圃場内搬送路およびこれを用いた圃場内搬送設備とする。
(もっと読む)
苗移植機
【課題】狭い領域での苗の植え付けなどの農作業を的確に行える苗移植機を提供すること。
【解決手段】電動モータ駆動式の前後輪3,4を支持する走行車体1の上方に苗供給装置16を配置し、車体1の下方に苗植付装置7を配置し、車体1を貫通して苗供給装置16と苗植付装置7をほぼ水平方向に回動自在に連結するピン12と該ピン12を回転自在に支持するバブ6を備えている苗移植機であり、狭い間隔で多量の苗を植えるネギなどの苗移植機として使用できる。
(もっと読む)
コンバイン
【課題】操向操作具の操作性の向上によってコンバインの作業能率を高める。
【解決手段】クローラを駆動するミッションケース32L,32R内に差動機構を設け、該ミッションケース32L,32Rに走行用油圧無段変速機構5と旋回用油圧無段変速機構6を取り付け、該走行用油圧無段変速機構5と旋回用油圧無段変速機構6による差動機構の駆動によって旋回内側の車軸18を正逆に無段変速して駆動する構成とし、前記旋回用油圧無段変速機構6の駆動回転速度を操向操作具の回動操作角度に応じて調節する構成とし、該操向操作具の前後方向の傾斜姿勢を調節可能に構成し、該操向操作具の掴み部に刈取部を昇降操作するスイッチを設ける。
(もっと読む)
作業機の走行変速装置
【課題】 連結機構の配置に工夫を凝らすことによって、作業機の直進性を確保することのできる機能を十分に果し乍、コンパクトに構成することのできる作業機の走行変速装置を提供する。
【解決手段】左のクローラ走行装置に対して左の静油圧式無段変速装置、右のクローラ走行装置に対して右の静油圧式無段変速装置を、夫々備える。左右の静油圧式無段変速装置の出力軸24、24同士を一体回転させる連結状態及び連結を解除する解除状態に切換自在な連結ボールを使用した連結機構Bを設けてある。
(もっと読む)
リモコン式水田用溝切機
【課題】水田用溝切機はゴム長ぐつを履いて本体を支えながら水田の中を何回も往復する作業を解決するために遠隔操作で溝切作業が出来る溝切機を提供する。
【解決手段】送信機(リモコン)1と受信機(エンジン本体)2の働きにより遠隔操作出来るようにする又 本体の直進性を高め転倒防止用に左フロート4と右フロート5を設けた溝切機である。
(もっと読む)
トラクタ
【課題】大幅な部品の共通化及びコストダウンを可能とする操作力連係手段40を備えたトラクタを提供することを目的とする。
【解決手段】操作力連係手段40は、支持ブラケット42と、連結ロッド46と、操作アーム48とからなり、支持ブラケット42が、ミッションケース13上方を機体左右方向に亘ってデフロック操作部材12を支持する。デフロック操作部材12が、オペレータの踏み込み操作によって回動すると、連結ロッド46、操作アーム48を介して、連結部材49が回動し、連結部材49が回動することによってシフトアームがデフロックスリーブをディファレンシャルギアと噛合させ、デフロック手段を作動させる。
(もっと読む)
作業用走行車
【課題】旋回内側の車軸に駆動力が発生しない期間が必要以上に長くなることを回避する。
【解決手段】左サイドクラッチ17Lを介して左車軸14Lに走行動力を伝動する左車軸伝動経路K1と、右サイドクラッチ17Rを介して右車軸14Rに走行動力を伝動する右車軸伝動経路K2と、旋回クラッチ18(20)及び差動装置19を介して左右の車軸に走行動力を伝動する旋回伝動経路K3(K4)とを備え、マルチステアリングレバー10の操作に応じて、一方のサイドクラッチ17L、17Rを切り動作させ、かつ、旋回クラッチ18(20)の入り動作圧力を上昇させることにより、機体を旋回させるコンバイン1において、マルチステアリングレバー10の操作に応じて、旋回クラッチ18(20)の入り動作圧力を立ち上げるタイミングを、サイドクラッチ17L、17Rを切り動作させるタイミングよりも早くする。
(もっと読む)
作業車の走行伝動構造
【課題】 作業車の走行伝動構造において、右及び左の伝動部材を伝動位置側に付勢するバネを必要以上に強いものに設定しなくても、右及び左の伝動部材を伝動位置に保持することができるようにように構成する。
【解決手段】 シフト軸47が中立位置(直進位置)にスライド操作されると、右及び左の操作部材51,52により右及び左の伝動部材28,29が伝動位置に操作され、バネ55により右及び左の操作部材51,52が右及び左の伝動部材28,29の伝動位置に保持される。シフト軸47が右旋回位置(左旋回位置)にスライド操作されると、右の操作部材51(左の操作部材52)により、右の伝動部材28(左の伝動部材29)が遮断位置に操作され、右の操作部材51(左の操作部材52)を介してバネ55が左の操作部材52(右の操作部材51)に押圧されて、左の操作部材52(右の操作部材51)が左の伝動部材29(右の伝動部材28)の伝動位置に保持される。
(もっと読む)
作業車両
【課題】操向ハンドル10の回動操作に応じて走行機体を左又は右に旋回させる構成の作業車両において、走行機体の進行方向を修正する際に、操向ハンドル10を細かく切り足したり切り戻したりする手間をなくす。
【解決手段】操向ハンドル10のハンドルホイル部94に、走行機体の進行方向を微調節操作するためのステアリングスイッチ100を備える。ステアリングスイッチ100における左右方向の操作は、操向ハンドル10の回動操作に拘らず、常に許容される構成にする。すなわち、ステアリングスイッチ100と操向ハンドル10とは互いに独立的に操作し得るように構成する。そして、操向ハンドル10の単位操作量に対する走行機体1の旋回動作量は、ステアリングスイッチ100の単位操作量に対する走行機体1の旋回動作量と比べて格段に大きく設定する。
(もっと読む)
自動収穫ロボット用車両
【課題】 農作業を自動で担うために狭く段差などのある圃場内の無限軌道を快適に走行して効率よく旋回することが可能な自動収穫ロボット用車両を提供すること。
【解決手段】 圃場における農作業を自動で担うため、該圃場内の無限軌道を走行する自動収穫ロボット用車両であって、前車軸に装着されたタイヤ付ホイール型の操向可能な前輪と、後車軸に設けられて独立に駆動制御可能な左右一対のクローラ走行装置とを備え、該クローラ走行装置は、少なくとも、駆動力を有する駆動輪と、該駆動輪の回転に従動する従動輪と、該駆動輪及び従動輪に巻回される無端状クローラとからなり、上方の車両本体部に対して略垂直方向の回転軸によって水平方向に回転自在に連結されていることを特徴とする自動収穫ロボット用車両とする。
(もっと読む)
コンバインの操作レバー
【課題】油圧によるコンバインの操向及び前処理部の昇降操作を行うマルチステアリングレバーの誤操作を防止して操作性を向上させる。
【解決手段】グリップ30を持ちながら機体の操向と前処理部14の昇降操作を行うマルチステアリングレバー21の上部に、機体の前進方向に対して左右に回転操作可能なグリップ30を設け、このグリップ30の回転操作により機体の操向方向を速やかに微調整できるように構成することによって、コンバイン11の操縦に不慣れなオペレータであっても、操作グリップ30の目視確認や触手による操作確認を不要とし、操作フィーリングを向上させると共に安全な運転走行を可能にした。
(もっと読む)
畑作用苗移植機
【課題】 従来の6輪構成では、機体の安定した支持は得られるが、前輪及び後輪の左右方向の向きが変向できない構成であるため、機体の操向性、畝に対する追従性が悪くなる問題がある。
【解決手段】 本発明は、左右一対の前輪(5),(5)、駆動輪(6),(6)、尾輪(7),(7)を前側から順に配備して6輪構成とする。畝の斜面に接触する畝案内ローラ(16),(16)を左右移動自在に設ける。畝案内ローラ(16),(16)の左右移動に関連して前輪(5),(5)を操舵すべく連動構成する。尾輪(7),(7)は操舵自在に構成する。
(もっと読む)
走行台車の操向装置
【課題】全方位移動可能であるうえに実用性に優れ、しかも狭い畝間でも走行することが可能な走行台車の操向装置を提供する。
【解決手段】タイヤ33及びタイヤホイール34からなる車輪部35と、タイヤホイール34に組み付けられて車輪部35を回転駆動するインホイールモータ36と、タイヤ33のタイヤ中心線Z1上に配置されて車輪部35を回転可能に支持する車輪フレーム37と、車輪フレーム37を支持すると共に、車輪フレーム37を軸廻りに回動させて車輪部35を操向する駆動支持部38とを備えた操向装置30を、走行台車20の四隅に配設する。
(もっと読む)
トラクタ
【課題】パワーステアリングを装備するトラクタにおいて、パワーステアリングバルブと油圧ポンプが干渉せずできるだけ近づけて配置できるようにする。
【解決手段】ボンネット4後方にステアリングハンドル6を配設し、該ステアリングハンドル6より延設したステアリングシャフト32にパワーステアリングバルブ34を連設した操舵構造を備えたトラクタにおいて、前記ステアリングシャフト32とパワーステアリングバルブ34の切換軸34aを、ユニバーサルジョイント33を介して連結し、該ユニバーサルジョイント33をステアリングハンドル6のチルト回動支点に配置するとともに、前記パワーステアリングバルブ34を左右一側に傾けて配設した。
(もっと読む)
作業機のステアリング操作構造
【課題】 作業機のステアリング操作構造において、不具合なく油圧ポンプを好適に駆動することができるようにする。
【解決手段】 機体前部に配備されたミッションケース9に操向自在な前輪を装備し、ミッションケース9に上下方向から挿通支承したステアリング軸88の下部と前輪のステアリング機構とを連動連結するとともに、エンジンに連動連結されて横架されたポンプ駆動軸78で作業用圧油を供給する油圧ポンプを駆動するよう構成した作業機のステアリング操作構造において、ポンプ駆動軸78を、ステアリング軸88より機体後方のケース内においてミッションケース9に挿通支承してある。
(もっと読む)
走行機に連結される畦形成機
【課題】容易な操作により制御部を切り換え走行機の異なる姿勢に対し常に一定の方向の直線状畦を形成する畦形成機を目標とする。
【解決手段】連結部は、装着フレームに設ける回動支点を中心に水平方向に回動可能であるとともに装着フレームと畦形成部間の距離を伸縮可能に設けており、制御部は、走行機が略直線状に前進して走行機と平行な直線状に畦形成作業する場合と、走行機が旋回しながら直線状に畦形成作業する場合とに対応して切換え可能であり、走行機が旋回しながら作業する場合の制御部は、装着フレームに設けた連結部の回動支点の回動変位量の情報を基に、あらかじめ設定されたプログラムにより連結部の回動支点の回動変位量に対応して装着フレームと畦形成部間の距離を変更させ、走行機が旋回移動するのに対し畦形成部は連続して直線状に移動しつつ畦形成作業を行わせる走行機に連結される畦形成機による。
(もっと読む)
61 - 80 / 138
[ Back to top ]