
Fターム[2B075AA10]の内容
収穫機本体(特定作物用) (1,318) | 対象収穫機 (161) | その他 (131)
Fターム[2B075AA10]に分類される特許
81 - 100 / 131
把持装置
【課題】複雑な制御を行うことなく、収穫対象果実を把持可能なハンド機構を提供する。
【解決手段】収穫対象のイチゴの−Z側に位置決めされるガイド16と、ガイド16に設けられ、Z軸に沿ってスライド移動するスライダ18と、スライダ18に設けられ、スライダ18の+Z方向への移動に伴って、ガイド16と一体的に構成されたストッパ12aと接触することにより、X軸回りに回転する第1回転部22Aと、第1回転部22Aにその下端部が固定され、第1回転部22Aの回転によりその上端部がイチゴに近づく方向に移動する第1フィンガー部24Aと、第1フィンガー部24Aの上端部とともに、収穫対象のイチゴを把持する第2フィンガー部24Bと、を備えている。
(もっと読む)
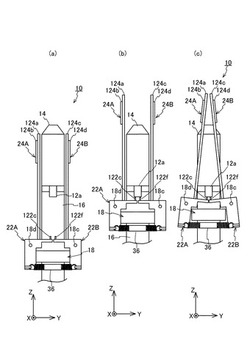
果実収穫装置及び果実収穫方法

【課題】収穫対象以外の果実による影響を受けることなく収穫対象果実を収穫することが可能な果実収穫装置を提供する。
【解決手段】収穫対象のイチゴを吸引して、位置を固定する吸引部14と、収穫対象のイチゴに隣接する隣接イチゴに対して、気体を吹き付けて、隣接イチゴを収穫対象のイチゴから離間させる第1気体噴出口126a、第2気体噴出口126b、第3気体噴出口126cと、位置が固定された収穫対象のイチゴを把持する第1フィンガー部24A、第2フィンガー部24Bと、を備える。
(もっと読む)
植物掘起し装置
【課題】
掘起した作物の残幹や残根の掘り起こしと同時に畝を崩して畝溝を埋め、畝溝に植生する雑草を埋没させると共に残幹や残根を回収できる植物掘起し装置を提供することを課題とする。
【解決手段】
進行方向に対して左右方向姿勢の回転軸23を中心として回転する左右支持部材22,22を設け、左右支持部材22,22の間に植物の残幹Tを圃場から掘り起こす複数の掘起し体27を設けた植物掘起し装置において、回転軸23の中心部から機体外側方向に畝を崩して畝溝に土を排出する左右螺旋体28a,28bからなる排土部材28を設けると共に、複数の掘起し体27に残幹Tを後方に案内する排土部材28よりも大径の左右案内部材29,29を設けて構成する。
(もっと読む)
果実収穫ロボット
【課題】
狭い栽培棚間でも確実に果実を検出し、果実を傷つけることがなく、且つ簡潔な構成の果実収穫ロボットを提供することを課題とする。
【解決手段】
果実の有無及び果実までの距離を検出する検出装置37と、収穫する果実が収穫可能かどうかを識別する識別装置49と、該識別装置49の識別結果にもとづいて果実を収穫するマニピュレータ45とからなる収穫装置Bを前後左右上下方向に移動自在に設けると共に、該収穫装置Bにて収穫した果実を回収する回収部Cを設け、マニピュレータ45で収穫した果実を把持したまま収穫装置Bを回収部Cへ移動させ、マニピュレータ45で把持している果実の把持を解除して回収部Cに投入させる制御装置53を設ける構成とする。
(もっと読む)
結球野菜収穫機
【課題】本発明は、収穫後の洗浄作業などの余計な手間を要せず、所望の位置で確実に切断して収穫すると共に収穫作業の効率化を図ることができ得る簡易な構造の結球野菜収穫機を提供することを目的とする。
【解決手段】本発明の結球野菜収穫機は、走行車体に、畝に植生する結球野菜の結球部を挟扼する案内装置と、案内装置により挟扼された結球野菜を切断して結球野菜の外葉と結球部とを分離する回転刈刃を有する切断装置とを設け、前記案内装置を前記走行車体の前方で前記畝に沿って前低後高状に配置した左右の案内ロッドにより構成し、この左右の案内ロッドにより畝の頂面の直上で両案内ロッドの間が狭くなる狭隘部を形成すると共に前記回転刈刃を前記狭隘部の後下方で畝の直上に配置したことを特徴とする。
(もっと読む)
作物運搬車
【課題】
作物の収容台車への積み込みが容易であり、収容台車が車体上から脱落しにくく、且つ走行するための条の作物を手作業で収穫する必要の無い作物運搬車を提供する。
【解決手段】
圃場から収穫した作物を収容する機枠22F,22Rに包囲体29を設けて構成する台車31を走行車体1上に設けた作物運搬車において、該台車31の包囲体29の一辺に車体の外側又は内側に回動自在な第1主壁部材25Fを設け、該第1主壁部材25Fに車体の外側又は内側に回動自在な第2主壁部材27Fを設け、前記第1主壁部材25Fに第1固定部材26L,26Rを設けると共に、前記第2主壁部材27Fに第2固定部材28L,28Rを設けて構成する開閉壁29Fを設けて構成する。
(もっと読む)
果実及び同様の物体の輸送システム
物品を輸送する装置が開示される。本発明の図示及び記載されている実施形態では、物品はりんごのような果実であり、果樹上の摘み取り場所から回収容器又は他の現場へ輸送することができる。この装置は、物品を受け取って輸送するようになっている管部材と、管部材内の離間した場所にある変形可能複数のバッフルとを含む。各バッフルが開口を画定し、開口は、物品が開口を通って移動して管内を進むように、物品がバッフル及び開口に係合してこれらを変形させることを可能にする。物品は、物品の前後で生じる圧力差によって管部材を通して押し続けられる。本発明の記載及び図示されている実施形態では、この圧力差は空気圧差である。  (もっと読む)
(もっと読む)
乗用型防除機
【課題】ブリッジを用いたトラック積み降ろし時の機体を安定させること、残液の発生を回避しつつ部品点数の削減を図ること等が可能な乗用型防除機を提供する。
【解決手段】薬液タンク32の下面に、前方から後方に向かうのに従って徐々に高さが低くなる後下がりの斜面部32dと、走行装置20に近接して配置される水平な底面部32eとを前後して形成する。斜面部32dと底面部32eとのなす角度を、機体が安全に登坂できる最大角度よりも大とする。さらに、このような薬液タンク32をフレーム本体10の左右側に設けると共に、薬液タンク32の斜面部32dの下方側に、作動油タンク51或いは燃料タンク52を配設すると共に、これら作動油タンク51或いは燃料タンク52に、薬液タンク32の斜面部32dに応じて隅切りされた隅切り部51a或いは52aを形成する。
(もっと読む)
果実収穫ロボット
【課題】画像処理技術を利用して、傷つけることなく高設栽培設備における目標の果実(例えばイチゴ)を収穫できる果実収穫ロボットを提供することである。
【解決手段】下方からイチゴの画像をカメラ13で撮影し、正面からイチゴをカメラ14で撮影し、両方の画像からイチゴの三次元画像の座標位置を特定し、その際にカメラ13、14で撮影したイチゴの赤色と白色画像から着色率を判別して収穫の是非の判断をする。イチゴが収穫可能と判断されると、画像位置に合わせてマニピュレータRを作動させてイチゴを収穫するロボットである。マニピュレータRは単一でも良いし、左右一対のマニピュレータR、Rから構成して、各々独立して移動自在にしても良い。
(もっと読む)
水草回収装置
【課題】水草の刈り取りと刈り取った水草の輸送を一つの装置で行う。
【解決手段】水草を輸送するポンプ部10の主軸12を、前記主軸12外周に取り付けた羽根車15を収容するケーシング16の吸込口18から突出するように延長し、その主軸12の下端部に主軸延長部20を主軸12と同軸状態に固定する。主軸延長部20は、軸方向の2箇所にそれぞれ複数の水草カッタ24、25を放射状に固定したものである。ポンプ部10の主軸12を回転させると、水草カッタ24、25が回転して水草を刈り取るとともに羽根車15が回転して吸引力が発生する。その吸引力により刈り取った水草を水とともにポンプ部10で直接吸い込むので、水草の刈り取りと刈り取った水草の輸送を一つの装置で行うことができる。
(もっと読む)
農作業用低床型腰掛台車
【課題】農作業で平地に植付及び収穫するらっきょう等は平地での手先作業のため、低くしゃがむかビールビンケース等に腰掛けて作業している。しゃがんで作業及び移動の繰返しにより足首、膝及び腰が痛くなる。ビールビンケース等に腰掛けての作業は平地からの高さにより背中を丸めて作業となり背中を痛める。又ケースの接地圧により平地を荒らすので均しながらの作業となる。
【解決手段】キャタピラ台車として腰の位置を低くし背中を丸めての作業をなくする。前後移動時は少し腰を持上げ足で地面を蹴っての移動となる。腰持上げ時空気圧封入シリンダ4a〜4dの上昇力が働くため足、膝及び腰に掛かる体重負担が少なくなる。
地面に掛かる体重負担は腰掛フレーム8、下部フレーム7、キャリヤロール2a〜f及びキャタピラベルト1より伝達となる。ベルト面積が広いため体重による接地圧は低く平地を荒らすことはない。
(もっと読む)
農作業用昇降竹馬
【課題】農作業の果実(りんご、なし、柿、みかん等)栽培で背丈以上の高さの作業、例えば袋掛及び収穫等の時、足場として脚立を使用している。脚立の場合、手の届く範囲が狭いので、いちいち脚立に上がったり、下りたり、セット変えしたりで面倒である。そのため少々無理な姿勢でも作業しようとするため転倒の危険がある。
【解決手段】背丈以上の作業高さで簡単に昇降可能とするため、足台22をブレーキ付ギヤードモータ13により駆動されるボールネジ12で昇降する昇降外筒10に取付けている。竹馬に乗った状態で操作ボタン4a、4bを操作し、上下方向の作業範囲を広げることが出来る。ブレーキ付ギヤードモータはバッテリ電源18で駆動としているので、どこでも操作可能である。場所移動は昇降ガイド外筒30を持って、足台を持上げて竹馬として移動可能なため、場所移動が簡単である。一対の竹馬はチエインで結合されているため安全性も計れる。
(もっと読む)
剪枝作業機および乗用型茶園管理機
【課題】一台で、茶園の浅刈り作業、深刈り作業および中刈り作業の夫々に対応することができて、構造が簡単で、安価で、農家の経営を圧迫することがない剪枝作業機および乗用型茶園管理機を提供すること。
【解決手段】剪枝作業機200は、フレーム20の下部に、回転式切断装置30を前方に位置するように設け、バリカン式切断装置40および搬送装置50を後方に位置するように設けている。回転式切断装置30の回転刃31,32と固定刃33で太い枝が切断されて、荒剪枝が行われる。荒剪枝による剪枝屑は、回転刃31,32によって、回転刃の後部に位置するスクリューコンベアの箇所に向けてはね飛ばされ、搬送されて畝間に排出される。荒剪枝で残った数ミリの細い小枝は、バリカン式切断装置40の往復動するバリカン刃41,42によって挟まれて切断されて、仕上げ剪枝が行われる。
(もっと読む)
茶畝跨走型茶園管理装置並びにこれに用いられる刈り落としダクト装置
【課題】 常に正確に剪枝した茶枝葉を畝間に案内することができる装置を提供することを技術課題としたものである。
【解決手段】 本発明の茶畝跨走型茶園管理装置Mは、走行機体1、茶刈機ユニット2、移送装置3、刈り落としダクト装置4を具えて成り、前記刈り落としダクト装置4は、上部ダクト41と、中継ダクト42と、下部ダクト43とが上下方向に連設されて成り、前記上部ダクト41は、上方において移送装置3における移送終端部32と直接または間接的に接続されるとともに、下端は走行機体1における走行体側に偏向するように構成され、また中継ダクト42は、前記上部ダクト41の下方にフレキシブルに連設されるとともに、左右の走行体の幅方向の設定に応じて、落下方向を偏向し得るように構成され、更に下部ダクト43は中継ダクト42下方に設けられ、常時落とし込み方向を鉛直方向に向けるように接続されていることを特徴として成るものである。
(もっと読む)
茎葉収穫機
【課題】
茎葉を収穫する姿勢を安定させ、効率よく収穫作業を行うことができる茎葉収穫機を提供することを課題とする。
【解決手段】
第1に、機枠6に走行装置1L,1Rと左右引起こし装置42と収穫した茎葉を機体後方に搬送する搬送装置Fとを備えた茎葉収穫機において、該左右引起こし装置42を機枠6の左右前側に各々独立して上下方向に回動自在に設けた左右支持部材26の前部に設け、該左右支持部材26を上動方向に付勢する左右バネ部材30を左右支持部材26と機体6側との間に設けると共に、左右引起こし装置42の下部に左右接地部材36を設け構成する。
第2に、機枠6側に基部を装着した左右リンク装置28を左右アクチュエータ31によって上下動自在に設け、該左右リンク装置28と左右支持部材26とを左右各々遊動機能を有する左右連結部材66で連結して構成する。
(もっと読む)
自動収穫ロボット用車両
【課題】 農作業を自動で担うために狭く段差などのある圃場内の無限軌道を快適に走行して効率よく旋回することが可能な自動収穫ロボット用車両を提供すること。
【解決手段】 圃場における農作業を自動で担うため、該圃場内の無限軌道を走行する自動収穫ロボット用車両であって、前車軸に装着されたタイヤ付ホイール型の操向可能な前輪と、後車軸に設けられて独立に駆動制御可能な左右一対のクローラ走行装置とを備え、該クローラ走行装置は、少なくとも、駆動力を有する駆動輪と、該駆動輪の回転に従動する従動輪と、該駆動輪及び従動輪に巻回される無端状クローラとからなり、上方の車両本体部に対して略垂直方向の回転軸によって水平方向に回転自在に連結されていることを特徴とする自動収穫ロボット用車両とする。
(もっと読む)
茶畝跨走型茶刈装置
【課題】 充分な収容量の確保、作業時の安全性の確保、使い勝手の向上、小型化の達成、十分な剛性の確保、シンプルな構造の達成等の相反する技術的要請を満たす装置を提供する。
【解決手段】 本発明の茶畝跨走型茶刈装置Mは、走行機体1と、茶刈機ユニット2と、茶葉Aを収容する収容ユニット50を含む収容系装置5とを具えて成り、前記収容ユニット50は、設置高さを走行機体1に対して昇降設定自在にするとともに、収容ユニット50は、底板54と、この底板54とは別体の側周ケージ55とを具え、この底板54をほぼ水平近くの基準姿勢に維持しながら、側周ケージ55は、その底縁が底板部からはみ出るように傾倒できる構成とし、このはみ出たことにより形成される底板54と側周ケージ55との間隙から収容ユニット50内に収容していた茶葉Aを順次下方に落下させて取り出すようにしたことを特徴として成るものである。
(もっと読む)
茶枝葉の移送装置並びにこれを具えた茶刈装置
【課題】 茶枝葉が移送ダクトの前面板に当接して、茶枝葉が移送ダクトの前方に倒れてしまうことを防止するとともに、背面ダクトの吹出口付近での風の乱れを防止し、且つ送風機の圧力風の圧力損失を低減させる茶枝葉の移送装置並びにこれを具えた茶刈装置を提供する。
【解決手段】 茶葉Aや枝幹等の茶枝葉Aを刈り取る刈刃22の上方に対し、移送ダクト6を具え、ここに背面風Wを前記刈刃22の後方位置から吹き込み、茶枝葉Aを所定の位置に向けて移送する装置において、前記移送ダクト6の移送開始部31の箇所には、前面板36の下方への張り出し長さを変更できる長さ調節板360が設けられている。更に移送ダクト6の移送開始部31の後方側内壁面は、上り傾斜角度が40〜70°に設定されていること、また上方の導入口39から下方の吹出口38に向かうにしたがい薄い厚さに形成されていることを特徴とする。
(もっと読む)
葉菜類の播種方法と播種機、ならびに収穫方法
【課題】葉菜類の播種方法と播種機、ならびに収穫方法を提供する。
【解決手段】本発明による播種方法を実施する播種機は、移動可能な機枠に前ローラ5、テープローラ3、後ローラ4がこの順に配置されている。種子供給部は、前ローラ5とテープローラ3間に設けられている。テープリール2は前記テープローラ3にテープ11を供給する。覆土手段は前記テープ11の全部または一部を覆土する。収穫はテープ11の引き上げにより行われる。
(もっと読む)
茎葉収穫機
【課題】
圃場に植生する茎葉を寄せて刈り取り、茎葉を傷つけることなく選別搬送して収穫できる茎葉収穫機を提供することを課題とする。
【解決手段】
機体下部に機体を前後進させる走行装置Aを設け、機体の左右一側部に機体を操作する操縦部Bを設け、機体の左右他側部に茎葉を収容した収容体23を載置する載置部Cを設け、機体前部に茎葉を寄せる茎葉寄せ装置Dを設け、該茎葉寄せ装置Dの後部に茎葉を刈り取る刈取装置Eを設け、該刈取装置Eの後部に茎葉を後方に搬送する搬送装置Fを設け、該搬送装置Fの後部に茎葉を収容する収容部Gを設けて構成する。
(もっと読む)
81 - 100 / 131
[ Back to top ]