
Fターム[2C150CA04]の内容
Fターム[2C150CA04]に分類される特許
21 - 40 / 131
三足歩行ロボット
【課題】従来の歩行ロボットは、姿勢制御を行うためのソフトウェアが複雑であり、またその問題を解決する目的で三本以上の脚部を搭載する歩行ロボットを用いる場合にはアクチュエータの数が増え、結果としてその多数のアクチュエータを制御する制御回路も複雑なものとなり、この部分の製作や整備に多大な労力が必要であった。
【解決手段】中央の脚部、または左右の脚部を用いて重心の左右の変化を抑えて歩行を行うようにする。さらに左右の脚部を連動させる事により脚部一本分のアクチュエータで二本の脚部を動作させる事で、一度に制御する必要のあるアクチュエータの数を二足歩行ロボットと同程度に減らす。
(もっと読む)
脚式ロボット

【課題】起伏や段差のある路面を安定に歩行することのできる脚式ロボットを提供する。
【解決手段】脚式ロボットは、記憶装置、4個以上の距離センサ群、路面センサ、及び、コントローラを備える。記憶装置は、足リンクの目標軌道を記憶している。距離センサ群は、足裏の4箇所以上の異なる位置に配置されている。各距離センサは、夫々の配置位置における足裏と路面との間の距離を計測する。路面センサは、路面の起伏や段差の形状を計測する。コントローラは次の処理を実行する。まずコントローラは、足リンクの目標軌道と路面センサの計測値によって定まる遊脚の足裏の接地予定領域を求める。次にコントローラは、求めた接地予定領域内に配置されている距離センサ群の中から3個の距離センサを選択する。そしてコントローラは、選択された3個の距離センサの計測値が等しくなるように足リンクの姿勢を制御する。
(もっと読む)
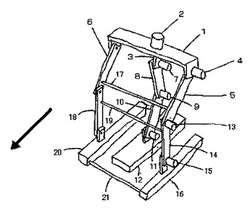
人形駆動装置
【課題】 擦弦型の人形駆動装置において擦弦動作を上腕及び前腕の両方の動作で行い、押弦動作も前腕を動作させて人間により近い形で演奏動作をさせる。
【解決手段】本発明の擦弦動作は前腕9の一端にワイヤー8を自在に取り付け、ワイヤー8は、円弧上のチューブ26を通って足裏の駆動部に連結されている。
一方上腕10の動きは、駆動レバー16に連結されたワイヤー18は足裏を通って駆動部に連結されている。
ワイヤー8、18を動作させると、バイオリンの弓上下に動き1弦から4弦までの擦弦動作をする。
押弦動作はワイヤー21は肩20の中心を通って、90度折り曲げられて前腕24の上部の穴25に自在に連結されている。
ワイヤー21はワイヤー18と止め金具19で結合されておりワイヤー18の動きと同じく動き、垂直の動きから水平の動きになって、上腕24を左右に動かせる。
(もっと読む)
人間のような指を有するロボットハンド
【課題】人間の手の形状因子及びジェスチャーを良くシミュレートするフィンガーアッセンブリを備えるロボットハンドを提供する。
【解決手段】各フィンガーアッセンブリ112,114,116,118,120に関して、ロボットハンドは4本のテンション要素に張力を選択的に加えるように操作可能なフィンガー駆動アッセンブリ160を備えている。各フィンガーアッセンブリは駆動アッセンブリによってテンション要素の選択的な引っ張り/移動によって移動する一連のリンク部材を含んでいる。リンクは3自由度を有するように互いに旋回可能に連結されている。フィンガーアッセンブリは、フィンガーアッセンブリを通してテンション要素を支持しかつ案内する一連のプーリーを備える。テンション要素は、プーリーの周りを部分的に延びており、それによって、フィンガーアッセンブリはテンション要素の非螺旋状の巻回でn+1駆動を実行する。
(もっと読む)
ぬいぐるみ玩具
【課題】製造コストの低減が図れるとともに、抱き心地がよく心が癒される新しい発想のぬいぐるみ玩具を提供すること。
【解決手段】ぬいぐるみ玩具Aの胴体部2には可撓性を有するワイヤー状部材5を曲折し、曲折した該ワイヤー状部材5の両端部5a、5bを頭部側3に、曲折部5cを後脚側に位置するように配置するとともに、上記ワイヤー部材5の適宜の場所を上記胴体部2に固定し、上記ワイヤー状部材5の両端部5a、5bをそれぞれ回動軸6a、6bに固定し、該回動軸6a、6bは所定間隔をおいて並設し、ぬいぐるみ玩具Aの頭部3には、モータ10を駆動力として上記回動軸6a、6bを同一方向に回動させ上記ワイヤー状部材5を捩じる駆動装置Bを配置した。
(もっと読む)
視線調整可能な義眼及び該義眼を固定した人形頭部
【課題】人形頭部内に視線調整可能に固定される義眼であって、人形頭部内の空間が非常に狭い場合や、人形頭部内の空間に通じる開口部の位置が限定されている場合であっても、義眼の繰り返しの着脱固定や、微細な視線調整を簡便かつ適確に行うことができる義眼及び該義眼が固定された人形頭部を提供すること。
【解決手段】人形頭部内に固定される義眼1であって、前面に瞳4を有する眼球2と、眼球2に設けられ、眼球2の視線5を調整する視線調整部3と、を有し、前記視線調整部3は、前記眼球2の後面であって前記眼球2の視線5延長線から外れた位置に設けられていることを特徴とする、義眼1を提供する。
(もっと読む)
コミュニケーションロボット
【課題】豊かな感情表現を行うことが可能なコミュニケーションロボットを提供する。
【解決手段】本発明のコミュニケーションロボット100は、顔の画像を表示するフレキシブルパネル3と、フレキシブルパネル3の背面に設置された複数のエアーパッド4と、複数のエアーパッド4にエアーを供給し、フレキシブルパネル3の表面に、前記顔の表情に応じた凹凸形状を付与するエアー供給ユニットと、を有することを特徴とする。
(もっと読む)
脚式ロボット
【課題】片脚立脚時に、遊脚側に傾いたときに立脚でバランスが取り易い脚式ロボットを提供する。
【解決手段】脚式ロボット10は、一方の足リンク20の足裏面30が、脚式ロボットを正面視したときに夫々の足リンク20の足裏面における脚式ロボット10の中心線CLに近い側の縁部31が足裏面30から内側面に向かって円弧状に湾曲している。脚式ロボット10は、片脚で接地しているときに立脚の内側へ傾斜するにつれて、接地している足の足裏面と地面の接点が内側へ移動する。接点が内側へ移動するほど脚式ロボット10を内側へ傾斜させるモーメントが小さくなる。この脚式ロボット10は、内側への傾斜に応じて足裏面と地面の接点が脚式ロボットの内側へ移動するのでバランスが取り易い。
(もっと読む)
造形膨らませ水面遊具
【課題】水面上と水面下とを往復させて、空気を入れて各種造形物の形状に膨らませて遊ぶ遊具を提供する。
【解決手段】乾燥状態では通気性を備える一方で濡れた状態では通気性が阻害される布状シート材で作られ、窄めた開口部2aから送り込まれた圧搾空気Aにより膨らんだ造形空間Bが形成可能となる袋状布体2と、内部に空気圧搾空間Cが形成され、下端部1bには大きく開いた開放口5が備わり、上端部1aには通気口4が備わった筒状体1と、前記筒状体1の通気口4と前記袋状布体2の開口部2aとが連通されて、気密に結合可能とする結合手段3とを備えて構成される。そして、前記結合手段3で結合した前記袋状布体2と一体の前記筒状体1を、水面上と水面下とを往復をさせて、前記筒状体1の空気圧搾空間C内の空気を前記袋状布体2の造形空間B内に送り込み、前記袋状布体2を造形した形状に膨らませて遊ぶ。
(もっと読む)
擬音発生装置とその擬音発生装置を備えた動作玩具
【課題】電子的な構成部品を用いることなく食物玩具を噛む動作に同期して食べる擬音を発生するとともに、少しずつ食べ物を飲み込んでいくリアル感のある食事動作をする動作玩具を提供すること。
【解決手段】食物を模した食物玩具2を食べる食事動作をする動作玩具Aであって、該動作玩具Aは口部1に挿入した上記食物玩具2を体内に取り込む取込装置Cと、食べ物を噛む動作をする噛み動作装置Dと、食物を噛み砕く擬音を発生する擬音発生装置Bとを備え、上記取込装置Cと噛み動作装置Dと擬音発生装置Bとは上記動作玩具Aの一部を押し操作する度に同期して作動すること。
(もっと読む)
ぬいぐるみの目玉取り付け構造
【課題】 ぬいぐるみの目や瞳を構成する目玉部材の取り付けが非常に容易で、技術力、熟練度、技量等の異なる作業者が取り付けても、両目の間隔、目玉部材の取り付け位置、向きや角度等を同一に取り付けることができるぬいぐるみの目玉取り付け構造を提供する。
【解決手段】
【0032】
本発明に係るぬいぐるみの目玉取付け構造は、ぬいぐるみの目を構成する一対の目部材と、ぬいぐるみ内部から一対の目部材を同時に固定保持する一つの固定保持部材とからなることを特徴とする。また、固定保持部材は、目部材の保持角度と、一対の目部材間の距離を保持することを特徴とする。また、固定保持部材は、一対の固定保持片を連結してなる構造であっても良い。また、目部材及び固定保持部材は、ぬいぐるみとの接触面が湾曲状であっても良い。
(もっと読む)
ハンドパペット
【課題】食べる真似遊びができ、かつ、ハンドパペット使用後に、ハンドパペットと共に使用した物を、遊びながら自然に収納することができ、お片付けの習慣を身につけながら使用した物を場所を取らずに確実に収納することができるハンドパペットを提供すること。
【解決手段】ハンドパペット1は、手指を挿入できる袋状のハンドパペット本体2と、ハンドパペット本体2の先頭部に形成され、上口3a及び下口3bの口奥が開口する口部3と、口部3の上口3a端面に沿って接着又は縫合され、背面に口部3全体を収容可能な収納部5を形成する頭部4とを備え、ハンドパペット1の収納時には、頭部4は、口部3の上口3a端面(周縁)を起点とし、上口3a端面(周縁)を包み込むように、第1の面4aの中程あたりから頭部4の頂上を外方に折り曲げてリバースされる。
(もっと読む)
人形体の玩具
【課題】 リアリティの高い人形体の玩具を、簡易な方法で実現する。
【解決手段】 人形体の各部位に対応する複数の部材101〜115が結合部300を介して回動可能に結合される人形体の玩具100であって、前記複数の部材101〜115は、それぞれ、平面形状を有する第1の面と、前記結合部300を構成する、略球形状の回動部302と該回動部302を回動可能に包持する包持部301のうちのいずれか一方が配されており、前記第1の面の裏面を形成する第2の面とを備えることを特徴とする。
(もっと読む)
四足動物人形
【課題】頚骨部と脊椎部を有する四足動物を模写した人形であって、現実の四足動物のリアルな可動を追及した四足動物人形を提供する。
【解決手段】頭部1と、二本の左右前脚107を駆動自在に備えた前胴部87と、頭部1と前胴部87との間に備えられ、頚骨構造17を有する首部15と、二本の左右後脚147を駆動自在に備える後胴部129と、前胴部87と後胴部129の間に備えられ、脊椎構造179を有する中胴部177とを含み、前記頚骨構造17と脊椎構造179が、現実の動物と同様なリアルな動きを可能とした関節構造を有している四足動物人形とした。
(もっと読む)
ロボット玩具
【課題】より単純な構造でより自然な歩行動作を実現する。
【解決手段】胴体部1と、左右の足部を交互に前側に繰り出すように運足する一対の脚部2L、2Rと、駆動源11の駆動力を一対の脚部の各々に伝達する動力伝達機構3とを備えるロボット玩具100であって、一対の脚部は、胴体部に対して前後方向の軸を中心に揺動自在に設けられ、動力伝達機構は、駆動源の駆動に基づいて第1継手部材及び第2継手部材が一体となって回動する自在継手を備え、自在継手の回動によって、歩行面に接地した状態で前後方向に並んだ左右の足部20、20のうち、歩行面から離地する後側の一方の足部を他方の足部に対して外側に配置させ、且つ、他方の足部を追い越して接地する一方の足部を他方の足部と前後方向に並ばせるように一対の脚部を運足動作に同期させて揺動させる。
(もっと読む)
難転ダルマの製造方法
【課題】
近年、目無しダルマの需要が落ち込み産地は構造不況となっている。これは最も多く使用されていた選挙時に、目的の達成が無いとの理由で廃棄する事が障害を持つ人達の心証を傷つけているからである。当選者1名に対し落選者数名という首長選に於いてはなおさらである。従来のものに形態を替え販路拡大を企画しても、顔書き10年と言われる位、高度な技術を要するため困難が伴う。
【解決手段】
技術の習得に日時を要する分野を補うため、産地より在庫品を仕入れ、剥離やヒビ割れを防ぐため南天の幹を使って「南天→難を転ずる」という替え言葉や効用を付加価値向上のため用いた。在来の置物型ダルマに重りを簡単に装着させる方法と材料部品の使用を考案して、困難に出合ったとき幸運に転ずるような形態と意味合いを持った起き上がり小法師的な南天ダルマを造った。
(もっと読む)
駆動装置及びこれを有するロボット
【課題】駆動ユニットの回転力を従動ユニットに伝達するケーブルに充分な張力を発生させることで、駆動ユニット及び従動ユニットとケーブルとの間に発生するスリップを防止し、回転力を損失なしに伝達する駆動装置及びこれを有するロボットを提供する。
【解決手段】駆動ユニット30と、前記駆動ユニット30と接触しないように離隔空間を挟んで設けられ、前記駆動ユニット30から発生した回転力を受けて回転する従動ユニット40と、前記駆動ユニット30と前記従動ユニット40とを連結し、前記回転力を前記従動ユニット40に伝達するケーブル50と、前記離隔空間に設けられ、前記ケーブル50に張力が発生するように前記ケーブル50が互いに接近する方向に前記ケーブル50を加圧する加圧ユニット60とを含んで駆動装置を構成する。
(もっと読む)
人形用頭部
【課題】リアルな眼球を用い、瞳の色を1眼球あたり2色持ち、この眼球を回転させることで、瞳色の切り替えが容易に行うことができ、視線の移動も簡単に行うことができる人形用頭部を得る。
【解決手段】眼球3は、1個の眼球を半分に切り、同じ形状で瞳色が異なる眼球を貼り合わせて、球状の眼球を作ることで、まず、これを挟持することが可能になり、スプリングテンション7によって、保持と動作の両立を可能にする。また、球状であるため、180度回転させることが出来るので、瞳の色をスイッチすることができる。もちろん、この課程に付随し、視線の移動も可能になっている。
(もっと読む)
顔表情表出ロボットの表情可変構造
【課題】簡単な構造で人間の顔表情を表出することができ、頭部全体の小型化、軽量化を実現できる他、眉や口等の模擬可動体又は模擬顔面の交換性を良好にし、また、メンテナンス性を向上させること。
【解決手段】顔表情表出ロボット10は、人間の顔面を模擬した模擬顔面12と、模擬顔面12の表面側に動作可能に取り付けられた眉体14と、眉体14を動作させて人間の顔表情を模擬表出する表情形成手段16とを備えている。模擬顔面14は、磁気を透過可能な材料及び厚みからなる。表情形成手段16は、眉体14に取り付けられた表側部材22と、模擬顔面14を挟んで表側部材22に相対配置された裏側部材24と、裏側部材24を移動させる移動機構16とを備えている。表側部材22及び裏側部材24は、何れか一方が磁石により構成され、何れか他方が磁石若しくは磁性体により構成されている。
(もっと読む)
歩行ロボット
【課題】従来から行われるアクチュエータによる能動的歩行だけではなく受動的歩行を積極的に行うことで、歩行ロボットの歩行に要するエネルギーを低減し、効率的な歩行の実現を図る。
【解決手段】歩行ロボットにおいて、その歩行と連動して、所定の閉空間内で制御用空気の動きを制御することで、該歩行ロボットの歩行をアシストする空気回路部を備える。そして、空気回路部は、歩行ロボットの歩行時において脚が立脚状態から遊脚状態に移行する際に、該脚を構成する各リンク部材の各関節部を介して行われる相対位置変化によって、制御用空気を介して該歩行のエネルギーの一部を回収する歩行エネルギー回収部と、歩行ロボットの歩行時において、脚が遊脚状態から立脚状態へ移行する際に、歩行エネルギー回収部によって回収された歩行エネルギーを開放し、該脚の立脚状態への移行をアシストする歩行アシスト部と、を有する。
(もっと読む)
21 - 40 / 131
[ Back to top ]