
Fターム[2D050FF04]の内容
杭、矢板の設置・撤去及びそれらの付属品 (4,237) | 制御装置(方法) (204) | 電気・電子手段(方法) (114) | 演算機手段(方法) (43)
Fターム[2D050FF04]に分類される特許
21 - 40 / 43
埋設機の実回転トルクの測定方法及び測定部材並びに測定装置
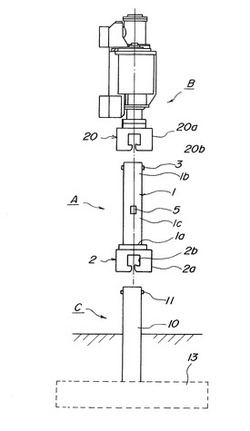
【課題】鋼管杭に付与されている実回転トルクを容易に測定する。
【解決手段】実回転トルクの測定方法は、鋼管杭を回転させて埋設する埋設機の実回転トルクを測定する方法であって、胴部1cに歪みゲージ5を取り付けた測定部材Aを有し、測定部材Aの下端部1aを固定すると共に起立させ、起立させた測定部材Aの上端1bに埋設機の鋼管杭を回転させる駆動装置Bを装着し、駆動装置Bを駆動して測定部材Aに回転トルクを付与しつつ、歪みゲージ5によって検出した測定部材Aの歪み量から該測定部材に付与されている回転トルクを測定する。
(もっと読む)
既製杭建込み施工管理装置

【課題】高精度な施工管理を容易にできる既製杭の建て込み工法における施工管理装置の提供。
【解決手段】実施工データ計測手段によって計測された実施工時計測データと所定の基本条件データとをコンピュータ29によるデータ処理によって比較し、実施工時計測データが各施工段階の基本条件データを満足することによって各施工段階の終了を判別できる表示を表示手段36,37に表示させるようにした。
(もっと読む)
溝掘削装置
【課題】掘削用のビット付きの掘削部材を埋設することなく再利用を可能とし、不経済の問題を解消した溝掘削装置を提供する。
【解決手段】掘削機16にセットされる管状のケーシング20と、ケーシング20の下端部に着脱可能に取付けられ、下端に掘削用のビット21cが設けられた掘削部材21とを備え、掘削機16によりケーシング20を下降させつつ回転させ、掘削部材21により地盤にリング溝22を形成する。
(もっと読む)
杭打機
【課題】杭打機本体の前部が浮き上がった状態でフリー降下機構が作動状態になることを防止して油圧モータを保護することができる杭打機を提供する。
【解決手段】リーダに上下動可能に設けたオーガ駆動装置を昇降させるためのオーガ昇降用油圧モータ18を駆動する昇降用油圧回路20aと、オーガ昇降用油圧モータを自由回転させてオーガ駆動装置をフリー降下させるためのフリー降下用油圧回路20bと、オーガ駆動装置でオーガを回転駆動するための回転用油圧回路31とを備えた杭打機において、フリー降下用油圧回路を作動状態にするフリー降下用の電気回路に、回転用油圧回路を作動させる回転用電気回路が回転用油圧回路を作動状態にしたときにのみフリー降下用の電気回路を導通状態とする開閉回路(リレー回路)を設ける。
(もっと読む)
杭上移動装置
【課題】移動効率が高い杭上移動装置を提供する。
【解決手段】前後に車輪50を備え、当該車輪50の回転により既設杭Pの上を移動する杭上移動装置1であって、上下に設けられた上側サイドローラ部62及び下側サイドローラ部63を有し、既設杭Pを移動方向に直交する左右両側から挟む一対のガイド部60を備え、既設杭Pに対する、一方のガイド部60が有する下側サイドローラ部63(可動型ガイド部60aが有する下側サイドローラ部63a)及び他方のガイド部60が有する上側サイドローラ部62(固定型ガイド部60bが有する上側サイドローラ部62b)の接触圧力が、ゼロ若しくは当該一方のガイド部60が有する上側サイドローラ部(可動型ガイド部60aが有する上側サイドローラ部62a)及び当該他方のガイド部60が有する下側サイドローラ部(固定型ガイド部60bが有する下側サイドローラ部63b)の接触圧力よりも低くなるよう構成した。
(もっと読む)
杭打機
【課題】油圧回路上の圧力損失やリリーフ弁の特性による不具合を解消して、作動速度が異なっても引抜力を正確に制限することができる杭打機を提供する。
【解決手段】ウインチに設けた巻層検出器からの信号と、油圧モータに設けた一対の圧力検出手段で検出した圧力から差圧を計測してワイヤーロープの実負荷を求め、油圧ポンプからの作動油の圧力を制御する電磁比例リリーフ弁の設定値をオーガの引き抜き荷重制限値に対応して調整する。
(もっと読む)
杭位置計測装置及び杭位置計測方法
【課題】搬入、設置、移動、搬出が容易であり、杭打ち開始から打ち止めまでの杭芯の移動軌跡と打ち止め位置を正確に記録することができる杭位置計測装置及び杭位置計測方法を提供する。
【解決手段】地中への杭Kの打ち込み時の杭芯の位置を計測する杭位置計測装置1において、立設された杭の外周面に径方向の中心線から同一方向に当接して配設され、地盤面に対して略水平方向の杭芯の移動を検出する2つの検出部材11を有する検出部10と、検出部10で検出した杭芯の移動を、杭Kの打ち込み開始から打ち止めまでの杭芯の移動軌跡として1枚の記録紙34に記録する記録部30と、検出部10で検出した杭芯の移動を記録部30に伝達する伝達部40と、杭位置計測装置1を移動するタイヤ3bと、検出部10、記録部30、伝達部40、タイヤ3bを保持する台車3とを備え、検出部10、記録部30、伝達部40を台車3に対して折り畳み可能とした。
(もっと読む)
振動機に油圧流体を供給する油圧ユニットのためのサーボ制御システム
【課題】振動機のエネルギー消費を抑制する。
【解決手段】油圧システム7のためのサーボ制御システムは,油圧流体を受ける少なくとも一つの油圧モータによって回転駆動される偏心ウエイトを含む振動機1又は振動システムに,前記流体を供給する,モータ9により駆動されるポンプ8を含む。振動機1により実際に消費されているエネルギーに関連する,油圧ユニット7のモータ9の回転速度の連続的な適応のための適応手段をさらに含む。
(もっと読む)
N値検出方法およびN値検出装置並びに杭穴掘削装置
【課題】 現在主流となっている油圧モーターを駆動源とする杭穴掘削装置について、地盤の掘削作業時にリアルタイムに正確なN値を検出することができないという問題がある。また、地盤中の岩などの掘削不能な障害物に当ると掘削バケットの方向が曲げられ、その結果杭穴が斜めに形成されるという問題がある。
【解決手段】 地盤を掘削する掘削バケットの駆動源である油圧モーターの入力圧力値と油圧モーターの回転周期の値とから掘削している地盤のN値を検出する。また、掘削作業中にN値をリアルタイムに監視することにより、地盤中の障害物や硬い地層などを検知し、杭穴が斜めに形成されることを防ぐ。
(もっと読む)
杭施工機
【課題】杭径や地盤性状が多様に変化する場合においても、その構成機器や杭を損傷させることなく品質に優れた杭基礎施工を実現できる杭施工機を提供すること。
【解決手段】その回転数とトルクの組合せを2パターン以上有した可変容量型の油圧モータ10,20を2基備え、かつ該油圧モータ10,20の回転を減速する減速機30を備えたオーガ駆動装置4をベースマシン1のリーダに沿って昇降自在に装備してなる杭施工機100であって、油圧モータ10,20は、トルク性能および回転性能からなる出力性能がそれぞれに異なる油圧モータであり、各油圧モータ10,20の有する出力性能と、各油圧モータ10,20の駆動の有無と、から規定されるオーガ駆動装置4の出力パターンを格納する格納手段と、該格納手段における出力パターンを自動選択してオーガ駆動装置4を駆動させる選択手段と、を具備している。
(もっと読む)
杭打設方法
【課題】杭打船による水上での杭打設工事において、高い精度で杭の設計打止め高における杭芯位置(杭天位置)の座標を計算し、杭を設計位置へ正確に打設可能な杭打設方法を提供する。
【解決手段】この杭打設方法は、旋回または前後傾斜する杭リーダ2に沿わせて杭3を保持し、ハンマ4により杭頭部へ打撃を与えて杭を水底に打設する杭打船1による杭打設方法であって、打設対象の杭の設計打止め高に対応する杭芯位置である杭天位置3bを位置入れ管理点とし、設計打止め高さ近傍の杭リーダ部分に全方位反射型の反射体5を配置し、反射体をターゲットとしてトータルステーション6で測量することで杭天位置の座標を計測し、座標計測データをもとに計算された杭位置に基づいて杭打設を行う。
(もっと読む)
杭打機の施工管理装置及び施工方法
【課題】複数の施工位置に、複数の鋼管杭を接続しながらそれぞれ埋設する際の作業効率を向上でき、作業時間の短縮を図れる杭打機の施工管理装置及び施工方法を提供する。
【解決手段】複数の鋼管杭を接続して埋設する位置を記憶する位置記憶手段と、該位置記憶手段に記憶された各施工位置における鋼管杭の埋設深度をそれぞれ記憶する深度記憶手段と、前記位置記憶手段に記憶された複数の施工位置から一つの施工位置を選択する位置選択手段とを備え、前記深度記憶手段は、前記位置選択手段で選択した一つの施工位置で鋼管杭を埋設したときに、該施工位置における埋設深度を記憶するとともに、前記位置選択手段で選択した他の施工位置で鋼管杭を埋設する際に該他の施工位置に対応した埋設深度を読み取り、読み取った埋設深度に新たに埋設した鋼管杭の埋設深度を加算して記憶する。
(もっと読む)
杭圧入機及び杭圧入方法
【課題】精度よく連続的に斜杭を地中に埋設することができる杭圧入機及び杭圧入方法を実現する。
【解決手段】地面に対して所定の角度をもって埋設された既設の斜杭Pの上端側にクランプ装置11を介して設置された杭圧入機10の姿勢を、アウトリガー装置17によって既設の斜杭Pと同じ角度に維持した状態で、チャック装置15により新たな杭を地面に対して所定の角度をもって圧入することによって、複数の斜杭Pを連続的に埋設してなる、複数の斜杭Pが並んだ斜杭列を精度よく形成することを可能にした。
(もっと読む)
杭打用の水ジェット装置
【課題】 杭打用の水ジェット装置を改良して、異常発生時に水ポンプの損傷を未然に防止する。
【解決手段】 水ポンプ11は水タンク10内の水を吸入・加圧・吐出し、ホース9を経てノズル4に供給する。上記ノズル4は杭1に固着されたソケット2に装着されている。前記水ポンプ11の吐出圧力は圧力センサ14で検出され、その検出信号はタイマ機能付き自動制御装置(CPU)15に入力される。該自動制御装置15は、入力された圧力信号の数値だけでなく、その変化の緩急を識別する機能を有している。水タンク内の水が無くなって水ポンプ11が空気を吸入するとか、ノズル4がソケット2から脱出するとかいった異常が発生すると、ポンプ吐出圧力は異常状態特有のパターンで変動するから、自動制御装置15は異常の内容を判別して水ポンプ11の負荷を軽減させるように制御する。
(もっと読む)
掘削機のロッド掴み変え装置
【課題】 掴み変え時の操作ミスによる誤ったインターロック解除を防止し、しかも操作を簡単にする。
【解決手段】 スイッチ22〜25の操作に基づいて第1及び第2両チャック装置7,8の締め/緩め動作を制御する制御部21を備え、この制御部21は、一方のチャック装置に対する緩め操作が行われたときに、タイマー28,29の作用により、他方のチャック装置の締め動作を一定時間行わせた後に、上記一方のチャック装置の緩め動作を行わせるシーケンス制御を行うように構成した。
(もっと読む)
既設杭撤去装置
【課題】 油圧スイベルジョイントを省略して安全かつ長寿命の既設杭撤去装置を提供する。
【解決手段】 リーダに沿って昇降するオーガマシン1と、オーガマシン1によって回転される回転部2と、回転部2と一体に回転するように回転部2に設けられて既設杭の切断又は引抜きのために使用されるアクチュエータと、回転部2と一体に回転するように回転部2に設けられてアクチュエータの作動の制御を行う作動制御手段4と、を備える。また、作動制御手段4は、作動油タンクと、作動油タンクから作動油をアクチュエータへ供給する油圧ポンプ6と、油圧ポンプ6を駆動させるモータ7と、アクチュエータの作動状態を切り換える電磁弁8と、電磁弁8及びモータ7の制御を行う制御部9と、を有する。
(もっと読む)
杭穴掘削方法
【課題】標準貫入試験のN値、掘削負荷電流をそれぞれエネルギー量へ換算して対比することにより地盤性状を正確に把握して、高品質の根固め部を構築する。
【解決手段】式2によりなるデータBと、式1よりなるデータAとを深度と関連付けて,対比しながら表示して掘削する。mは標準貫入試験のハンマーの質量、hはハンマーの落下高さ、φはコーンの断面積、gは重力加速度、NはN値である。
(式2)En=mgh・N/(0.3×φ) [J/m3]
Aave1 はある区間で、深さL1を掘削速度v1で掘削する場合の平均積算電流値、Vは掘削機のオーガー電圧、Dは杭穴径である。
(式1)Ep=Aave1×200V/(v1・D2・π/4) [J/m3]
(もっと読む)
杭の施工方法及び杭の施工システム
【課題】鋼管の径及び長さに関わらず硬質の地盤に圧入可能で、かつ、経済性に優れたコンクリート杭の施工方法及びコンクリート杭の施工システムを提供する。
【解決手段】 コンクリート杭の施工システム2は、掘削部材6と、全旋回圧入機8と、リバース掘削機14とを備える。掘削部材6は掘削翼28とリバースヘッド30とにより構成される。掘削翼28は3枚の翼部36と複数の掘削ビット38とを備え、鋼管4の内側部分の地盤E1を掘削する。リバースヘッド30は3本の腕部42と、各腕部42の先端部に鋼管4の内側へ回動可能に設置される回動部44と、回動部44の下端部に取り付けられる複数の掘削ビット46とを備え、鋼管4の下端面の下方部分の地盤E2を掘削する。回動部44は掘削部材6が引き上げられる際に鋼管4の下端面に当接し、鋼管4の内側へ回動して鋼管4の内部へ縮径する。
(もっと読む)
杭施工管理装置
【課題】 地盤に鋼管杭を貫入する際に所定深度毎に検出される各種情報を記憶するように構成した杭施工管理装置を提供する。
【解決手段】 鋼管杭を貫入する施工ポイントに対応する杭番号を入力し、杭番号別に鋼管杭貫入時に検出される情報を順次記憶するように構成し、操作部2から同一杭番号が入力されると、検出される情報を先に記憶された情報に続いて記憶している。そのため、杭番号毎に情報を収集でき、情報の取り出しが容易となり、作業者が施工ポイントの施工順序を記憶する必要がなく、情報の加工ミスが皆無となる。また、操作部2から同一の杭番号が入力されると、情報検出時の施工深度とその施工ポイントでの最大深度とから得られる新たな施工深度に対して情報を表示している。そのため、情報検出時の施工深度と前回の情報に連続して表示できる。
(もっと読む)
杭打込姿勢監視装置及び杭打込姿勢監視方法
【課題】 本発明の目的は、住宅等の基礎を構成する杭の打込作業を行う際に、杭を正しい姿勢で打ち込むことを可能とする、杭打込姿勢監視装置を提供する。
【解決手段】 地中への杭の打込姿勢の精度を確保するための杭打込姿勢監視装置Sであって、杭3の周りで、地盤面に対して略水平に配設される少なくとも二つの計測部材1を有し、計測部材1は略平行な二本の光線を照射する照射手段10を備え、それぞれの計測手段から照射される二本の光線13が互いに交差して、杭3の位置する適正範囲14が形成され、杭3が適正範囲14から外れたときに、杭3が不適性位置にあることを報知する報知手段を備えている。
(もっと読む)
21 - 40 / 43
[ Back to top ]