
Fターム[2D050FF05]の内容
杭、矢板の設置・撤去及びそれらの付属品 (4,237) | 制御装置(方法) (204) | 電気・電子手段(方法) (114) | 入力センサ(方法) (51)
Fターム[2D050FF05]に分類される特許
21 - 40 / 51
杭リバウンド量測定装置および方法
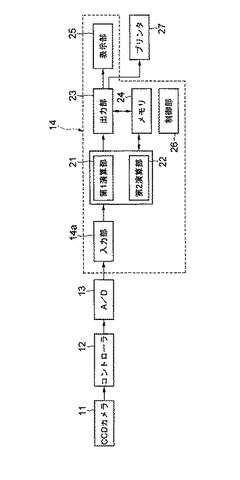
【課題】CCDカメラなどの光学測定装置を用いて杭のリバウンド量を測定する際に測定距離の計測を不要にした杭リバウンド量測定装置および方法を提供する。
【解決手段】杭リバウンド量測定装置は、イメージセンサを有するカメラ11と、イメージセンサからの電気信号に基づいて演算処理を行う演算処理装置14と、を備え、カメラは、測定基準部と寸法が既知である寸法既知部とを有するターゲットが設けられた打設対象の杭から離れた位置にターゲットを含む所定領域を撮像するように設置され、演算処理装置は、カメラでターゲットの寸法既知部を撮像して出力した電気信号に基づいて、カメラからの電気信号とターゲットにおける寸法との関係をあらわす換算係数を演算する第1演算部21と、ターゲットの測定基準部を撮像して出力した電気信号から換算係数を用いて杭の打設による測定基準部の変位量に換算するようにして演算する第2演算部21と、を有する。
(もっと読む)
杭打機の安定度測定装置及び方法

【課題】実際の作業状態の杭打機を使用して正確な安定度を容易に求めることができる杭打機の安定度測定装置及び方法を提供する。
【解決手段】フロントジャッキ及びリアジャッキを作動させて杭打機を第1の傾斜角度で浮かせたときに各ジャッキに加わる第1の荷重と、前記フロントジャッキ及びリアジャッキを作動させて杭打機を第2の傾斜角度で浮かせたときに各ジャッキに加わる第2の荷重とを求め、前記第1の傾斜角度及び前記第2の傾斜角度と、前記第1の荷重及び前記第2の荷重とに基づいて杭打機の重心位置を算出し、算出した重心位置と下部走行体の寸法とから杭打機の安定度を算出する。
(もっと読む)
回転貫入杭施工システム
【課題】経験の少ないオペレータが運転する場合にも、熟練したオペレータの運転操作に近い操作が可能となる回転貫入杭施工システムを提供する。
【解決手段】回転貫入杭を地盤中の所定位置まで回転貫入するにあたり、回転貫入杭の施工状態を連続的に測定する。測定データに所定の範囲を超える変動があった場合の施工装置に対する1または複数の特定操作を、事前の熟練オペレータの操作による施工データに基づいて設定しておく。施工中に測定データが所定の範囲を超えたとき、その特定操作を自動制御によりまたはオペレータの操作により行う。測定データとしては、施工中の、回転貫入杭に加わる回転トルク、押込み力、施工速度、回転貫入杭の単位時間当たり回転数および回転貫入杭内への土砂の浸入量などを測定する。
(もっと読む)
既存杭の切断装置及び既存杭の撤去工法
【課題】ワイヤーソーの噛み込み及び破断を回避しつつ、既存杭を簡便に切断できる切断装置を提供する。また、ワイヤーソーの噛み込み及び破断を回避しながら、既存杭を簡便に切断し撤去する撤去工法を提供する。
【解決手段】既存杭10の外径よりも大きな内径を有する外側ケーシング2及び内側ケーシング1を、既存杭10と略同軸にしてこの順に地中に圧入した後、内側ケーシング1と外側ケーシング2の間の土砂の少なくとも一部を除去する。駆動装置,主ガイドプーリー及び方向変換プーリーに架け渡され、切断用窓から内側ケーシング1内に導かれたワイヤーソー9で、既存杭10を切断し、切断片を撤去する。本発明に係る既存杭の切断装置及び既存杭の撤去工法によれば、切断片が内側ケーシング内の土砂12に支持され、切断片に掛かる重力のためにワイヤーソー9に負荷が掛かることが回避される。
(もっと読む)
埋設機の実回転トルクの測定方法及び測定部材並びに測定装置
【課題】鋼管杭に付与されている実回転トルクを容易に測定する。
【解決手段】実回転トルクの測定方法は、鋼管杭を回転させて埋設する埋設機の実回転トルクを測定する方法であって、胴部1cに歪みゲージ5を取り付けた測定部材Aを有し、測定部材Aの下端部1aを固定すると共に起立させ、起立させた測定部材Aの上端1bに埋設機の鋼管杭を回転させる駆動装置Bを装着し、駆動装置Bを駆動して測定部材Aに回転トルクを付与しつつ、歪みゲージ5によって検出した測定部材Aの歪み量から該測定部材に付与されている回転トルクを測定する。
(もっと読む)
既製杭建込み施工管理装置
【課題】高精度な施工管理を容易にできる既製杭の建て込み工法における施工管理装置の提供。
【解決手段】実施工データ計測手段によって計測された実施工時計測データと所定の基本条件データとをコンピュータ29によるデータ処理によって比較し、実施工時計測データが各施工段階の基本条件データを満足することによって各施工段階の終了を判別できる表示を表示手段36,37に表示させるようにした。
(もっと読む)
溝掘削装置
【課題】掘削用のビット付きの掘削部材を埋設することなく再利用を可能とし、不経済の問題を解消した溝掘削装置を提供する。
【解決手段】掘削機16にセットされる管状のケーシング20と、ケーシング20の下端部に着脱可能に取付けられ、下端に掘削用のビット21cが設けられた掘削部材21とを備え、掘削機16によりケーシング20を下降させつつ回転させ、掘削部材21により地盤にリング溝22を形成する。
(もっと読む)
杭上移動装置
【課題】移動効率が高い杭上移動装置を提供する。
【解決手段】前後に車輪50を備え、当該車輪50の回転により既設杭Pの上を移動する杭上移動装置1であって、上下に設けられた上側サイドローラ部62及び下側サイドローラ部63を有し、既設杭Pを移動方向に直交する左右両側から挟む一対のガイド部60を備え、既設杭Pに対する、一方のガイド部60が有する下側サイドローラ部63(可動型ガイド部60aが有する下側サイドローラ部63a)及び他方のガイド部60が有する上側サイドローラ部62(固定型ガイド部60bが有する上側サイドローラ部62b)の接触圧力が、ゼロ若しくは当該一方のガイド部60が有する上側サイドローラ部(可動型ガイド部60aが有する上側サイドローラ部62a)及び当該他方のガイド部60が有する下側サイドローラ部(固定型ガイド部60bが有する下側サイドローラ部63b)の接触圧力よりも低くなるよう構成した。
(もっと読む)
杭打機
【課題】油圧回路上の圧力損失やリリーフ弁の特性による不具合を解消して、作動速度が異なっても引抜力を正確に制限することができる杭打機を提供する。
【解決手段】ウインチに設けた巻層検出器からの信号と、油圧モータに設けた一対の圧力検出手段で検出した圧力から差圧を計測してワイヤーロープの実負荷を求め、油圧ポンプからの作動油の圧力を制御する電磁比例リリーフ弁の設定値をオーガの引き抜き荷重制限値に対応して調整する。
(もっと読む)
杭位置計測装置及び杭位置計測方法
【課題】搬入、設置、移動、搬出が容易であり、杭打ち開始から打ち止めまでの杭芯の移動軌跡と打ち止め位置を正確に記録することができる杭位置計測装置及び杭位置計測方法を提供する。
【解決手段】地中への杭Kの打ち込み時の杭芯の位置を計測する杭位置計測装置1において、立設された杭の外周面に径方向の中心線から同一方向に当接して配設され、地盤面に対して略水平方向の杭芯の移動を検出する2つの検出部材11を有する検出部10と、検出部10で検出した杭芯の移動を、杭Kの打ち込み開始から打ち止めまでの杭芯の移動軌跡として1枚の記録紙34に記録する記録部30と、検出部10で検出した杭芯の移動を記録部30に伝達する伝達部40と、杭位置計測装置1を移動するタイヤ3bと、検出部10、記録部30、伝達部40、タイヤ3bを保持する台車3とを備え、検出部10、記録部30、伝達部40を台車3に対して折り畳み可能とした。
(もっと読む)
振動機に油圧流体を供給する油圧ユニットのためのサーボ制御システム
【課題】振動機のエネルギー消費を抑制する。
【解決手段】油圧システム7のためのサーボ制御システムは,油圧流体を受ける少なくとも一つの油圧モータによって回転駆動される偏心ウエイトを含む振動機1又は振動システムに,前記流体を供給する,モータ9により駆動されるポンプ8を含む。振動機1により実際に消費されているエネルギーに関連する,油圧ユニット7のモータ9の回転速度の連続的な適応のための適応手段をさらに含む。
(もっと読む)
センサ取付構造
【課題】低周波から高周波まで、どのような振動に対しても防振効果を備え、センサの精度向上を図るとともに、センサ及び防振ゴムの耐久性も確保することのできるセンサ取付構造を提供する。
【解決手段】センサ取付ブラケット12の上部に弾性係数の小さな第1ゴム材32を備えた第1防振ゴム30を取り付け、第1防振ゴム30の上部に連結部材40を配置し、連結部材40とセンサ取付ブラケット12との間に第1ゴム材32を挟着する。連結部材40の上部に弾性係数の大きな第2ゴム材52を備えたの第2防振ゴム50を取り付け、連結部材40とセンサ20との間に第2ゴム材52を挟着する。連結部材40とセンサ取付ブラケット12との間に、センサ取付ブラケット12と連結部材40との間隔を確保するサポートバー60を配置する。
(もっと読む)
基礎杭施工における根固め球根部の形状確認システム
【課題】基礎杭用の掘削穴の途中や下部に根固め球根部を造築する基礎杭施工において、造築された根固め球根部の形状を的確に確認することができる、基礎杭施工における根固め球根部の形状確認システムを提供する。
【解決手段】掘削治具Kに取り付けられた拡大翼変化計測記憶手段21によって、拡大翼4の拡径・縮径状態の経時的変化を直接計測して記憶し、その直接計測された拡大翼の拡径・縮径状態の経時的変化と、拡大翼深度計測記憶手段22によって計測された拡大翼の深度の経時的変化とを統合することによって、根固め球根部50の形状を検知する。
(もっと読む)
杭施工機
【課題】杭径や地盤性状が多様に変化する場合においても、その構成機器や杭を損傷させることなく品質に優れた杭基礎施工を実現できる杭施工機を提供すること。
【解決手段】その回転数とトルクの組合せを2パターン以上有した可変容量型の油圧モータ10,20を2基備え、かつ該油圧モータ10,20の回転を減速する減速機30を備えたオーガ駆動装置4をベースマシン1のリーダに沿って昇降自在に装備してなる杭施工機100であって、油圧モータ10,20は、トルク性能および回転性能からなる出力性能がそれぞれに異なる油圧モータであり、各油圧モータ10,20の有する出力性能と、各油圧モータ10,20の駆動の有無と、から規定されるオーガ駆動装置4の出力パターンを格納する格納手段と、該格納手段における出力パターンを自動選択してオーガ駆動装置4を駆動させる選択手段と、を具備している。
(もっと読む)
杭穴掘削管理方法及び装置
【課題】掘削液(水)とセメントミルク(高温)の温度差を利用して、杭穴内にいずが吐出されているかを現場内に通報する。
【解決手段】掘削液(水)を第一液タンク16に、セメントミルクを第二液タンク17に収容する。共通搬送管20の一端21を掘削機1のジョイント4に、他端21aを切り替えバルブ23(第一液タンク16、第二液タンク17)に接続する。共通搬送管20の一端21側に温度センサー23を設置し、掘削機1と切り替えバルブ18の周辺に警報灯24を設置して掘削装置25とする(a)。切り替えバルブ23を第一液タンク16側に適宜開いて、掘削液を用いて杭穴32を掘削する(b)(c)。切り替えバルブ18を第二液タンク17側に開いて、セメントミルク35を吐出しながら掘削ロッド10を地上に引き上げれば(d)、温度センサー23によりセメントミルクが感知され警報灯24が点灯する。
(もっと読む)
掘削装置および基礎杭施工時の拡大翼状態判定装置
【課題】機械式の拡大翼であったとしても、地上部において、拡大翼の拡径を簡便且つ確実に確認することが可能にする。
【解決手段】掘削ロッド1の先端部に対し拡径可能に支持される拡大翼4を備える基礎杭施工用の掘削装置による掘削で使用される。上記拡大翼4が拡径・縮径する際の可動部、若しくは掘削ロッド1の先端部に取り付けられて、拡大翼4の少なくとも縮径状態から拡径状態への変化を検出する傾斜センサ20と、その傾斜センサ20から信号を入力すると、掘削ロッド1を振動させて、弾性波として信号を送信する発信装置20と、地上部において、掘削ロッド1を伝搬してきた弾性波を検出する受信装置とを備える。
(もっと読む)
杭穴掘削ヘッド、杭穴掘削ヘッドの掘削腕の位置確認方法
【課題】掘削腕20の揺動角度を測定することにより、掘削腕20の長さを考慮して、その深さでの杭穴径を、地上にてリアルタイムで把握し、全長に亘る正確な杭穴掘削を保証できる。
【解決手段】揺動軌跡に沿った第二センサー27A、28Aを有するヘッド本体1の水平軸19に、第一センサー27、28を有する掘削腕20、20を揺動自在に取り付けて掘削ヘッド30とする。掘削ロッド40を正回転すると、掘削刃25で径D1の杭穴軸部42を掘削し(a。小径掘削状態)、逆回転で径D2の拡底根固め部43を掘削する(b。大径掘削状態)。この際、第一センサー27が、小径掘削で第二センサー27Aの27Abに位置し、大径掘削で第二センサー27Aの27Abに位置するので、揺動角度データが地上に送られる。掘削ロッド40を回転しないと、第一センサー27は第二センサー27Aの27Aaに位置し、掘削角度無しのデータが送られる。
(もっと読む)
杭打設方法
【課題】杭打船による水上での杭打設工事において、高い精度で杭の設計打止め高における杭芯位置(杭天位置)の座標を計算し、杭を設計位置へ正確に打設可能な杭打設方法を提供する。
【解決手段】この杭打設方法は、旋回または前後傾斜する杭リーダ2に沿わせて杭3を保持し、ハンマ4により杭頭部へ打撃を与えて杭を水底に打設する杭打船1による杭打設方法であって、打設対象の杭の設計打止め高に対応する杭芯位置である杭天位置3bを位置入れ管理点とし、設計打止め高さ近傍の杭リーダ部分に全方位反射型の反射体5を配置し、反射体をターゲットとしてトータルステーション6で測量することで杭天位置の座標を計測し、座標計測データをもとに計算された杭位置に基づいて杭打設を行う。
(もっと読む)
杭打機の施工管理装置及び施工方法
【課題】複数の施工位置に、複数の鋼管杭を接続しながらそれぞれ埋設する際の作業効率を向上でき、作業時間の短縮を図れる杭打機の施工管理装置及び施工方法を提供する。
【解決手段】複数の鋼管杭を接続して埋設する位置を記憶する位置記憶手段と、該位置記憶手段に記憶された各施工位置における鋼管杭の埋設深度をそれぞれ記憶する深度記憶手段と、前記位置記憶手段に記憶された複数の施工位置から一つの施工位置を選択する位置選択手段とを備え、前記深度記憶手段は、前記位置選択手段で選択した一つの施工位置で鋼管杭を埋設したときに、該施工位置における埋設深度を記憶するとともに、前記位置選択手段で選択した他の施工位置で鋼管杭を埋設する際に該他の施工位置に対応した埋設深度を読み取り、読み取った埋設深度に新たに埋設した鋼管杭の埋設深度を加算して記憶する。
(もっと読む)
杭圧入機及び杭圧入方法
【課題】精度よく連続的に斜杭を地中に埋設することができる杭圧入機及び杭圧入方法を実現する。
【解決手段】地面に対して所定の角度をもって埋設された既設の斜杭Pの上端側にクランプ装置11を介して設置された杭圧入機10の姿勢を、アウトリガー装置17によって既設の斜杭Pと同じ角度に維持した状態で、チャック装置15により新たな杭を地面に対して所定の角度をもって圧入することによって、複数の斜杭Pを連続的に埋設してなる、複数の斜杭Pが並んだ斜杭列を精度よく形成することを可能にした。
(もっと読む)
21 - 40 / 51
[ Back to top ]