
Fターム[2F063DA23]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定方法 (3,108) | 測定結果を基準データ、設定値と比較 (128) | 基準データ、設定値が記憶されているもの (63)
Fターム[2F063DA23]に分類される特許
21 - 40 / 63
磁気利用の位置検出方法及び位置検出センサ
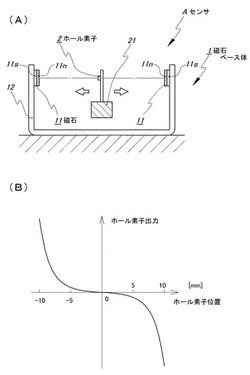
【課題】長距離の位置検出を可能とし、起動時のイニシャライズも不要とする磁気利用の位置検出方法及び位置検出センサを提供する。
【解決手段】位置検出方法は、所定の離隔距離で磁極対向させた一対の磁石の磁界内に、磁気検知手段をその感磁方向と該磁石の中心磁界方向と一致する直線上に移動可能に配置し、磁界強度変化を検出して相対位置情報を得るものである。また、直線上に基準位置を設定すると共に、磁界強度と磁気検知手段の移動位置との相関を予め特定して磁石間における磁気検知手段の絶対位置情報を得ても良い。位置検出センサは、所定の離隔距離をもって一対の磁石を磁極対向させて保持した磁石ベース体と、磁石間を結ぶ直線上にその中心磁界方向と感磁方向とを一致させて配置した磁気検知手段とから成り、磁気検知手段を取り付けた被検出対象物が直線上を移動するように構成する。
(もっと読む)
位置決め装置

【課題】安価で簡易な構成によりスライダの位置検出を安定して行うことができるとともに、設計の自由度の高い位置決め装置を実現する。
【解決手段】互いに直交するX軸およびY軸の少なくとも1軸方向に位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ1の1軸方向の位置を検出するレゾルバ2と、
このレゾルバ2のスライダ1の進行方向側に隣接して配置されたレゾルバ2a,2bと、
このレゾルバ2a,2bの出力に基づいてレゾルバ2の出力を補正する補正部と、
この補正部からの出力に基づいてスライダ1の位置を算出する位置算出部と、
を備えたことを特徴とする。
(もっと読む)
回転角度検出装置
【課題】検出信号から得られる最大値と最小値が励磁信号と検出信号との位相差や励磁信号の歪み成分に影響されることなく検出信号の最大値及び最小値を求め、これら最大値及び最小値から回転角度を正確に求めることができる回転角度検出装置を提供する。
【解決手段】回転角度検出装置10は、励磁信号の入力により90°位相が異なる2相の検出信号を被検出体の回転角度に応じて出力するレゾルバ11と、レゾルバ11から出力された各検出信号の最大値を保持するピークホールド回路17と、レゾルバ11から出力された各検出信号の最小値を保持するボトムホールド回路18と、ピークホールド回路17及びボトムホールド回路18により保持された各検出信号の最大値及び最小値をそれぞれA/D変換するA/D変換部19と、A/D変換部19によってA/D変換された各検出信号の最大値及び最小値から被検出体の回転角度を求める角度演算部21とを備える。
(もっと読む)
管の外側壁に接したまたはそのすぐ近くにある少なくとも一つの強磁性物質を有する堆積物の探知方法および装置
本発明は、管の外側壁に接したまたはすぐ近くにある、ニッケル、マグネタイト、または類似物のような強磁性物質を少なくとも一つ有する堆積物の探知方法に関しており、該探知方法は、管の内部の磁気源の、電気モーターによるその長さ方向における移動の過程、電気モーターにおける電流の強度の測定の過程、そして、電気モーターにおいて測定される電流の強度変化に応じた、前記堆積物の位置および/または厚みおよび/または体積の決定の過程とを有する。本発明の別の目的は、前記方法を実施する装置に関している。 (もっと読む)
金属検出装置
【課題】 金属の検出能力を高める。金属体が励磁器に対して対称に位置しても検出する。金属体が片側に位置する時とその反対側に位置する時とで出力信号の極性が異なることをなくす。
【解決手段】 励磁器1による一次磁界で受信器3、5と検出領域を覆い、検出領域の一次磁界中に金属体が存在すると、二次磁界の発生又は一次磁界の変形によって受信器の出力信号が変化し、出力信号の変化で金属体を検出する方法において、励磁器は、両側に、極性が逆になる対の一次磁界を発生する対の電流線路を有し、受信器は、磁界の無感方向を有する。受信器は、励磁器に対して非対称になる位置であって励磁器の片側になる位置に配置し、励磁コイルの片側の一次磁界中に位置させ、その励磁コイルの片側の一次磁界に対して無感方向に配置する。検出領域の一次磁界中に金属体が存在しないときには、受信コイルの出力信号を零ないし微小量にする。
(もっと読む)
非接触式回転角度検出センサ装置およびその出力補正方法
【課題】
低コストで回転角測定精度の向上した非接触式回転角度検出センサを提供すること。
【解決手段】
5次以上の多項式にて近似して得られた補正定数に基づいて角度を算出する、GMR素子及び信号処理手段及び磁界発生手段を含むセンサの個体差を補正する補正手段を備える。組立て後、基準回転角度信号と実測出力とを比較して温度依存性の低い補正係数で、実測出力信号を補正する。
【効果】
低コストで回転角測定精度の向上した非接触式回転角度検出センサを実現することができる。
(もっと読む)
シートのたるみ評価方法および評価装置
【課題】比較的構造が簡単でメンテナンスが容易な装置を用いて、精度よくシートのたるみを評価すること。
【解決手段】空間を移送されるシート1の表面にタッチローラー2を押し当て、該タッチローラーの変位量を測定することにより、タッチローラーを押し当てた位置におけるシートのたるみを評価する。
(もっと読む)
レゾルバの異常検出装置および電気式動力舵取装置
【課題】レゾルバの異常を高精度に検出し得るレゾルバの異常検出装置および電気式動力舵取装置を提供する。
【解決手段】判定ブロックB1において順次演算される2乗和S1のうち最大値である最大2乗和S1maxと最小値である最小2乗和S1minとがメモリに記憶される。そして、全判定ブロックB1〜B5における各最大2乗和S1max〜S5maxのうちの最大値である異常判定用最大2乗和Smaxと各最小2乗和S1min〜S5minのうちの最小値である異常判定用最小2乗和Sminとの差が、異常判定用閾値Skを超える場合に、モータレゾルバが異常であると判定される。このとき、各判定ブロックB1〜B5の検出単位時間tsの合計が判定時間taよりも短くなるように各判定ブロックB1〜B5が設定されている。
(もっと読む)
位置測定装置
【課題】 位置測定装置を構成する送信系コイルと受信系コイルのうち、送信系コイルを小さくする。
【解決手段】 位置測定装置は、第一の地点に配置された一軸の励磁コイル14と、該励磁コイルに交流信号を供給して励磁するための信号発生回路と、中心軸が互いに直交するようにして第二の地点に配置された第一、第二、第三の検出コイル21−1、21−2、21−3と、前記第一、第二、第三の検出コイルの出力から電圧信号を得る回路とを含む。前記励磁コイルを励磁した時に前記第一、第二、第三の検出コイルに誘起される誘起電圧を用いて予め定められた演算を行うことにより、前記検出コイルの座標系に対し前記励磁コイルの中心軸方向が既知であるとき前記第二の地点から前記第一の地点までの方位と距離を算出する。
(もっと読む)
プラズマトーチ
【課題】プラズマトーチに於いて、周囲に特別大きな部材や装置を配置する必要がなく、且つ可及的に被切断材に対するプラズマトーチの略中心の高さを検出する。
【解決手段】電極1の周囲にプラズマガスを供給すると共にノズル2からプラズマアークを噴出して被加工材Bを加工するプラズマトーチAに於いて、ノズル2よりも先端部位に導電性を有する導電部材3を着脱可能に配置すると共に該導電部材3をプラズマトーチAを構成する金属部分(ノズル2、トーチ本体4)から電気的に絶縁し、導電部材3と被加工材Bとの間の静電容量を測定してプラズマトーチAと被加工材Bとの間の距離を演算する。
(もっと読む)
芯出し調整支援装置
【課題】 再調整が発生しない的確な調整量の指示を行うことができる芯出し調整装置を提供する。
【解決手段】 固定側回転機器の回転軸と、少なくとも4点の台座上へのボルトによる固定箇所を有する調整側回転機器の回転軸と、の芯を出すための芯出し調整支援装置であって、調整側回転機器の回転軸と固定側回転機器の回転軸との変位を計測する変位センサーと、変位センサーからの出力に基づいて、台座上への調整側回転機器のボルトによる固定前の調整側回転機器の回転軸と固定側回転機器の回転軸とのずれ量を計算するとともに、台座上への調整側回転機器のボルトによる固定後の調整側回転機器の回転軸と固定側回転機器の回転軸とのずれ量を計算し、固定前のずれ量と固定後のずれ量から補正量を計算し、補正量に基づいてずれ量を補正して、補正されたずれ量から調整側回転機器の位置の調整量を算出する情報処理部と、を有することを特徴とする。
(もっと読む)
半導体素子端面の誘電体薄膜膜厚評価方法
【課題】半導体素子端面の反射率を精度よく測定するとともに、測定値に基づいて該半導体素子端面の反射率をより設計値に近づけた半導体素子を得ることを可能とする半導体素子端面の誘電体薄膜膜厚評価方法を提供する。
【解決手段】TiO2膜およびSiO2膜を備え、半導体素子の光出射端面に設けられるHR膜の膜厚を、HR膜に対して半導体素子の光出射端面外部から照射された励起光によって生成された光励起電流を測定し、光励起電流の測定値に基づいて光励起電流の変動率Iphを算出し、光励起電流の変動率Iphの算出結果と、予め参考値として計算したTiO2膜の設計膜厚と実際の膜厚のずれ及びSiO2膜の設計膜厚と実際の膜厚のずれに対する変動率の関係とを比較し、TiO2膜の実際の膜厚とSiO2膜の実際の膜厚の取り得る領域(I)、(II)と(IV)を決定することによって求めるようにした。
(もっと読む)
共振センサの測定位置検出方法及び装置
【課題】共振センサの誤差要因の影響を減少させ、より高精度な測定を可能にして、使い勝手や信頼性を向上する。
【解決手段】加振手段(圧電素子24)により測定子22を長手方向に共振振動させ、検出手段(圧電素子26)により測定子22の共振に応じた出力信号を得て、該出力信号の変化を捉えることで、測定子先端22Aと測定対象10との接触を検知するようにした共振センサ20の測定位置検出に際して、測定子22と測定対象10間の距離と、出力信号の変化状態の関係を表わす特性曲線を得て、該特性曲線から、接触開始位置に相当する出力信号の変化開始位置を推定して、測定位置とする。
(もっと読む)
位置検出装置
【課題】誤作動を防止した位置検出装置を提供する。
【解決手段】第1及び第2のMRセンサ131A、131Bは、第1及び第2の方向2,3からカウンターマグネット132の磁力線が横切るとき、磁気抵抗が最大になるように構成されている。ECU14は、第1及び第2のMRセンサ131A、131Bから出力された出力電圧が、しきい値140より大きいときを「H」、小さいときを「L」とする2値とし、この2値の組合せとシフトマップ141に基づいてカウンターマグネット132の位置を判断する。
(もっと読む)
ノズル検査装置およびノズル検査方法
【課題】加工ノズルを損傷させることなく簡易な構成で正確な加工ノズルの検査を容易に行なうことができるノズル検査装置を得ること。
【解決手段】加工処理の種類に応じた加工ノズルで被加工物のレーザ加工を行なうレーザ加工機の加工ノズルを検査するノズル検査装置において、上端部が下端部よりも細いテーパー状のゲージ32と加工ノズルとの間の静電容量を測定する静電容量測定部14と、ゲージ32がレーザ出射口に挿入されるよう加工ノズルのゲージ32に対する高さを制御する加工ヘッド制御部12と、静電容量が予め設定した所定値を示す際の加工ノズルの高さを検出するZ座標検出部13と、検出した加工ノズルの高さに基づいて、加工ノズルが装着対象の加工ノズルに対応するノズル内径を有しているか否かを判定するノズル判定部16と、ノズル判定部16の判定結果を出力する判定結果出力部18と、を備える。
(もっと読む)
ワイヤーロープの探傷装置
【課題】
破断部位がワイヤーロープの深部であっても損傷計測の信頼性を向上する。
【解決手段】
鋼線の損傷部に発生する漏洩磁束を検出するワイヤーロープの探傷装置において、ワイヤーロープ1を長手方向に磁化するように磁化器2と、ワイヤーロープ1の円周方向に複数個配置され、漏洩磁束を検出する磁気検出手段3,4と、損傷部の深さ,損傷量,複数個の磁気検出手段から検出した値の和、隣接した磁気検出手段により検出された差分値、との関係を予め記憶した記憶器8,10と、を備え、磁気検出手段により得られた値と、記憶器に記憶された値と、に基づいて損傷部の深さ及び損傷量を求める。
(もっと読む)
レゾルバ
【課題】 駆動モータにより発生する漏洩磁束の変化により影響を受けることの少ないレゾルバを提供すること。
【解決手段】 モータ本体56に供給される電流量を検知する電流検知部72と、電流量をモータ本体56に流したときの漏洩磁束により発生する、レゾルバ80の検出角度誤差を電流量−検出角度誤差関係データ75として記憶するPROM74と、電流検知部72が検知した電流量に基づいて、PROM74の電流量−検出角度誤差関係データ75により、レゾルバ80の検出角度を補正する補正係数演算部76、補正部77とを有する。
(もっと読む)
変位測定方法及び装置
【課題】温度変化の大きい測定条件下でも、金型の距離の変位を精度よく測定することができる変位測定方法及び装置を提供することを目的とする。
【解決手段】対向する固定型20及び可動型21を有する金型2の距離Dの変位を測定する変位測定方法であって、可動型21に渦流センサ13を配置するとともに、固定型20に被測定部14を設けて、渦流センサ13により被測定部14に渦電流を誘起し、被測定部14に誘起された渦電流に基づく出力電圧を検出する出力電圧検出工程と、渦流センサ13及び被測定部14のそれぞれの温度T・tを検出する温度検出工程と、出力電圧検出部10にて検出された出力電圧、及び温度検出部11にて検出された温度T・tから、固定型20と可動型21との距離Dを測定する距離測定工程とを有する。
(もっと読む)
破片検出センサ
【課題】 液体中に混入した破片を、その破片の材料が金属・非金属,磁性・非磁性,導電性・非導電性等のいずれの材料特性であるかを問わずに検出できる破片検出センサを提供する。
【解決手段】 この破片検出センサは、液体中に混入する破片を検出するセンサである。2つの対面する平板5,7と、これら2つの平板5,7のうち少なくとも一つの平板7を対面方向に動かして前記2つの平板5,7に破片を挟み込ませる平板移動機構9と、測定・判定手段16とを備える。測定・判定手段16は、前記2つの平板5,7間のギャップを測定することで、前記破片の有無、大きさ、または蓄積量を検出する。前記2つの平板のうち少なくとも1つの平板には絶縁層7aを設ける。
(もっと読む)
重複した測定を用いた歪みに対して免疫性の位置追跡
【課題】物体の位置を追跡する方法およびシステムを提供する。
【解決手段】物体の位置を追跡する方法は、2つ以上の磁界発生器によって生み出された磁界の磁界強度を測定するために物体に関連する磁界センサーを用いる工程を含み、磁界強度のうち少なくとも一つの測定値は、歪みを受けている。物体の回転不変の配置座標は、測定された磁界強度に対応して、計算される。物体の補正された配置座標は、測定された磁界強度の歪みに対応して、補正された配置座標に対する測定された磁界強度の各々の相対的な寄与を調整するように、回転不変の配置座標に座標補正関数を適用することによって、求められる。
(もっと読む)
21 - 40 / 63
[ Back to top ]