
Fターム[2F065AA01]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734)
Fターム[2F065AA01]の下位に属するFターム
Fターム[2F065AA01]に分類される特許
241 - 260 / 613
物体検出装置、それを用いたインタラクティブシステム、物体検出方法、それを用いたインタラクティブシステム構築方法、コンピュータプログラム、及び記録媒体
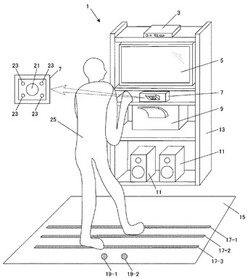
【課題】 対象物への反射部材の装着や取付けを行うことなく、撮影により、対象物を検出できる物体検出装置を提供することである。
【解決手段】 スクリーン15に取付けられ、受けた光を再帰反射する再帰反射シート17−1〜17−3,19−1,19−2と、これら再帰反射シートを撮像する撮像ユニット7と、撮像により得られた差分画像を解析するMCU33と、を備える。MCU33は、差分画像から、プレイヤ25の足により再帰反射シートが遮蔽された部分に対応する遮蔽領域を検出する。遮蔽領域の検出は、プレイヤ25の足を検出することに相当する。足が再帰反射シート上に位置する場合、その部分は差分画像に現れず、遮蔽領域となって現れるからである。足への再帰反射シートの装着や取付けを行うことなく、撮影により、足を検出できる。
(もっと読む)
物体の遠隔検知のためのセンサおよび映像システム

【課題】物体が拡散媒質内に配置されているときに物体の位置および/または形状を遠隔測定する比較的簡単なセンサを提供する。
【解決手段】センサと物体との間の距離に対して短いコヒーレンス長を有する光源110と、送られたビームを入射ビーム126と基準ビーム123とに分割するビームスプリッタ112と、基準ビーム123と、入射ビーム126により照射された物体120から反射されたビーム127との干渉受光時にホログラムを生成し、基準ビーム123の作用による異方性回折によりクリスタルガラスから送り返される回折ビーム124でホログラムを再生する光屈折クリスタルガラス114と、回折ビーム124の受光時に情報を生成する検出装置116とを含み、それによって、検出装置116は、クリスタルガラスから回折ビーム124だけを受け取る。
(もっと読む)
ロボットのツール位置検出方法、ロボットと対象物との相対位置検出方法、及びそれらの装置
【課題】ツール位置やロボットと対象物との相対位置を簡単かつ高精度に検出する。
【解決手段】ロボット2のアーム7先端のツール取付部7eに球面部8aを有するツール8を取り付け、ツール取付部7eから球面部8aの中心までのツールベクトルの成分に未知数を設定し、球面部8aを平板16に対してツール8の姿勢を変えて少なくとも未知数の数と同じ回数当接させ、その当接時のロボット2のアーム7の関節角度に基づいて当接時のツール取付部7eの位置をそれぞれ求め、特定の座標系において、平板16のZ位置と球面部8aの曲率半径Rcとの和から得られる球面部8aの中心のZ位置が、ツール取付部7eのZ位置とツールベクトルのZ成分との和から得られる球面部8aの中心のZ位置に等しいことを意味する連立方程式を少なくとも未知数の数と同じ回数連立させ、その連立方程式を解くことでツールベクトルの成分を求める。
(もっと読む)
測定ターゲットの拡大可能なシャフト
【課題】どのような大きさのパーツ、又はパーツの形状も、正確に測定できる装置と方法を提供すること。
【解決手段】測定ターゲティング装置は、ターゲット本体、流路を有する導管、導管の流路内に収容される流体、及び与圧系統を備える。ターゲット本体は、写真測量法のターゲット、セオドライト用ターゲット、建設用ボール、タッチプローブ用ターゲット、座標測定機械のプローブ用ターゲット、レーザートラッカー用ターゲット、及びレーザープロジェクター用ターゲットから選択される。導管は中心線を有し、パーツに設けられた穴に受容されるほぼ円筒形の部分を有し、スチール、アルミニウム、及びプラスチックより選択された材料よりなる。導管は、導管の流路内の流体が与圧されると拡大可能である。与圧系統は、流路内の流体を与圧することにより、導管をその中心線の周りで拡大させることができる。
(もっと読む)
画像処理によるトロリ線の摩耗および偏位測定装置
【課題】ひとつの装置でトロリ線の摩耗量及び偏位量を測定可能なトロリ線の摩耗測定装置を提供する。
【解決手段】ラインセンサ2によって撮像された画像を時系列的に並べてなるラインセンサ画像を作成するラインセンサ画像作成部4aと、ラインセンサ画像に対して二値化処理を行って二値化ラインセンサ画像を作成する判別分析二値化処理部4bと、二値化ラインセンサ画像に対して摩耗部分の両側のエッジを検出するトロリ線摩耗部分エッジ検出部4dと、摩耗部分の両側のエッジの位置からトロリ線の重心位置を検出するトロリ線重心位置検出部4eと、トロリ線の重心位置からトロリ線の実際の偏位量を検出するトロリ線偏位実座標変換計算部4fと、少なくともトロリ線偏位実座標変換計算部4fによる処理と並行してトロリ線の摩耗量を検出するトロリ線摩耗部分幅計算部4gとを備えるようにした。
(もっと読む)
ファイバセンサ用ファイバ支持装置
【課題】ファイバの固定力調節や分解及び再組付けが可能であり、簡単に着脱できて組付け性も優れるように、改善されたファイバセンサ用ファイバ支持装置を提供する。
【解決手段】ファイバセンサFの保護チューブ9を通す挿通孔1a、外周雄ネジ部10、先拡がり内周面12を備える支持本体1と、ファイバ線6を通す一対の支持孔15、先窄まり外周面16、小径筒部17、環状側周面18を備えるフッ素樹脂製のフェルール2と、雄ネジ部10に螺合する雌ねじ部19、環状側周面18に当接する環状押圧周面20、小径筒部17を挿通するガイド内周面21を持つユニオンナット3とを有し、先窄まり外周面16が先拡がり内周面12に嵌め込まれ、環状押圧周面20が環状側周面18に当接し、雄ねじ部10が雌ネジ部19に螺合された状態におけるユニオンナット3の締め込みによるフェルール2の軸心方向押圧により、支持孔15に通されているファイバ線6を把持可能なファイバ支持装置A。
(もっと読む)
波長ずれ測定装置、光源装置、干渉測定装置、露光装置及びデバイス製造方法
【課題】二光束の光路長差が安定に一定となる構成を備えることにより光源波長の変動をpm以下の精度、分解能で測定可能な波長ずれ測定装置を提供する。
【解決手段】本発明の波長ずれ測定装置は、光源から射出される光束の波長の変動量を測定する波長ずれ検出センサWLCD1であって、光源から射出された光束を複数の光束に分割し、複数の光束のうち二光束を合成して干渉光を生成するビームスプリッタBS2と、ビームスプリッタBS2により分割された二光束の光路長差が一定になるように設けられたスペーサ部材SPと、ビームスプリッタBS2により生成された干渉光を検出する複数の光電センサPDA+、PDB+とを有し、複数の光電センサPDA+、PDB+は、干渉光に基づいて互いに位相がずれた複数の干渉信号を出力し、複数の干渉信号を用いて波長ずれ量を算出する。
(もっと読む)
ワーク姿勢認識方法およびワーク姿勢認識装置
【課題】カメラ画像からワークの姿勢を認識するときの処理時間を短縮する。
【解決手段】ランダムな姿勢で供給されるワークWの姿勢を認識するワーク姿勢認識方法であって、前記ワークWは、外面Fごとに方向性を有する異なる種類のマークCが付与されており、前記ロボット10は、前記ワークWの前記マークCを撮像する撮像手段12と、複数の種類の前記マークCに対して前記撮像手段12により撮像されたマスタ画像Mを予め格納するマスタ画像格納手段42とを有し、前記撮像手段12により撮像されるマーク画像Pを取り込む画像入力工程S3と、取り込まれた前記マーク画像Pと前記マスタ画像格納手段42に格納される前記マスタ画像Mとを比較し、前記マーク画像Pと前記マスタ画像Mとの一致度もしくは差異を検出する画像比較工程S4と、前記画像比較工程S4で得られた比較結果から前記ワークWの姿勢を判定する姿勢判定工程S5と、を有する。
(もっと読む)
ワーク識別方法およびワーク識別装置
【課題】カメラ画像からワークの種類および姿勢を認識するときの処理時間を短縮する。
【解決手段】ランダムな姿勢で供給される複数の種類のワークWiを識別するワーク識別方法であって、前記ワークWiは、1の外面Fには方向性を有し前記ワークWiごとに異なる基本マークが付与され、他の外面Fには前記基本マークを外面Fごとに識別可能に変形した派生マークが付与され、ロボット10は、前記マークを撮像する撮像手段12と、前記マークに対するマスタ画像Mを格納するマスタ画像格納手段42とを有し、前記撮像手段12により撮像されるマーク画像Pを取り込む画像入力工程S3と、取り込まれた前記マーク画像Pと前記マスタ画像Mとを比較して一致度もしくは差異を検出する画像比較工程S4と、前記画像比較工程S4で得られた比較結果から前記ワークWiの種類および姿勢を判定する判定工程S5とを有する。
(もっと読む)
撮影カメラの位置算出装置
【課題】容易にかつ確実に撮影カメラの位置を算出可能な、被写体の映像を撮影するために撮影スタジオを移動機構により移動する撮影カメラのカメラ位置算出装置を提供する。
【解決手段】撮影カメラの位置算出装置1は、カメラパラメータが入力されるカメラパラメータ入力手段10と、傾斜誤差値と回転誤差値とが入力される誤差情報入力手段15と、カメラパラメータを記憶するカメラパラメータ記憶手段20と、カメラパラメータ記憶手段20が記憶する更新カメラパラメータを更新するカメラパラメータ更新手段30と、カメラパラメータを用いて、初期カメラ位置と更新カメラ位置とを算出するカメラ位置情報算出手段40と、撮影予定位置入力手段50と、カメラ位置情報と撮影予定位置より撮影カメラの移動量及び方向を算出する移動量算出手段60とを備える。
(もっと読む)
三次元形状検査装置
【課題】簡単な画像処理を用いて、実時間(1フレーム)で、微細な対象物の有無検査を高速で実施可能とする。
【解決手段】時間相関イメージセンサ(カメラ10)を使用した白色干渉計において、時間的にインコヒーレントな光源の干渉範囲を検査対象に合わせて決定し、前記白色干渉計で得られる相関画像を2値化して、該2値化された画像により、前記干渉範囲内の対象物有無検査を実施する。ここで、被測定物が外部環境によって振動する振動変位を取得し、白色干渉計の参照ミラーの変位信号から、時間相関イメージセンサに与える参照信号を生成することができる。
(もっと読む)
画像分析方法、画像分析装置及び画像分析プログラム
【課題】既知のサイズであるものを食事と共に画像に写し込まなくても、画像から食材の大きさを容易に推定させることができる画像分析方法、画像分析装置及び画像分析プログラムを提供することを目的とする。
【解決手段】コンピュータ10による画像分析方法であって、食材の色と形状とを含む特徴条件を記録した第一の記録手段62を参照し、画像から特徴条件を満たす食材を特定する第一の特定ステップと、食材の大きさを記録した第二の記録手段64を参照し、第一の特定ステップにおいて特定された食材の大きさを特定する第二の特定ステップと、第二の特定ステップにおいて特定された食材の大きさに基づいて、画像に含まれる食材の原寸大の大きさを画像上で視覚的に推定させる基準を、画像と共に表示する表示ステップとを有することにより上記課題を解決する。
(もっと読む)
基板測定方法および基板測定装置
【課題】スループット速度が改善された基板の特性を測定するための方法および装置を提供する。
【解決手段】基板の特性を測定するための方法および装置である。ターゲットが基板上に存在しており、基板の走査移動の間に測定が実行される。基板の走査移動は、リニアな移動であり、測定は、パルス光源を用いてターゲットの反射像を取得することを含む。1つの光パルスの持続時間は100psecである。リソグラフィ装置は、このような測定装置を含み、デバイス製造方法は、このような測定方法を含む。
(もっと読む)
多自由度干渉計
【課題】改良された多軸干渉計を提供すること。
【解決手段】装置は、複数の自由度に関する反射測定対象物の相対位置を測定する多軸干渉計を含み、この干渉計は、複数の自由度の内の異なる一つの自由度に関する測定対象物の相対位置についての情報を各々が含む複数の出力ビームを生成するように構成される。各出力ビームは測定対象物に共通経路に沿って少なくとも1回接触するビーム成分を含み、複数のビーム成分の内の少なくとも一つのビーム成分が、共通経路とは異なる第1経路に沿って測定対象物に対して少なくとも2回目の接触を更に行なう。
(もっと読む)
ビーム光投受光装置
【課題】投受光分離部やスキャンミラー付近のビーム径を小さくしやすいビーム光投受光装置。
【解決手段】発光部が長径方向と短径方向を持つ光源3と、ビーム光投光光学系と、スキャンミラー11と、投光光束と戻り光束を分離する投受光分離部材13と、受光素子5と、戻り光束を受光素子5に集光させる集光レンズ部15とを備え、ビーム光投光光学系は、発光部の長径方向及び短径方向の双方に対して正の屈折力を有するコリメートレンズ部51、その後側焦点よりも対象物側に配置され、長径方向及び短径方向の双方に対して正の屈折力を有し、発光部の像を対象物側に形成する結像レンズ部52、短径方向にて正又は負の屈折力を有し、短径方向での光束を平行光束に近づけると共に、長径方向の屈折力の絶対値が短径方向の屈折力の絶対値よりも小さい投光レンズ部53を配列してなる。
(もっと読む)
バックライトビジョンマシン
バックライトビジョンマシン装置(30;100)が記述される。これは、対象物を撮像するイメージセンサ(34;134)を含む(46;102)。第1の特性を有する放射を生成するための放射源(36、62;136)、および、第1の特性(38;138)を有する放射を第2の特性(48;148)を有する放射に変換するための放射コンバーター(44;144)も備える。放射源(36、62;136)は、第1の特性(38;138)を有する放射を、放射コンバーター(44;144)に投射するように配置され、それにより、第2の特性(48;148)を有する放射を生成する。一方、放射コンバーター(44;144)は、イメージセンサ(34;134)により撮像される対象物(46;102)を照明するように配置される。対象物(46;102)は、放射コンバーター(44;144)とイメージセンサ(34;134)の間に設置可能で、このような対象物は、放射コンバーターにより生成された第2の特性(48;148)を有する放射によりバックライトされる。放射源(36、62;136)は、撮像される対象物(46;102)と放射コンバーター(44;144)に第1の特性(38;138)を有する放射を投射するように配置される。  (もっと読む)
(もっと読む)
地中変位測定装置
【課題】精密な変形を計測する光ファイバ格子センサを使用して地盤の傾きが感知できるようにした地中変位測定装置を提供する。
【解決手段】少なくとも1つの測定手段Qを含み、測定手段Qは内側に収容部を持つ本体2、本体2内に挿入されるフレーム6、フレーム6の内側に挿入されて一端がヒンジ結合され、本体2の傾きに連動して回転される重量部材7、本体2及びフレーム6を貫通して挿入され、重量部材7に一端部が固定された光ファイバ5、光ファイバ5の他端部を固定させるようにフレーム6内に設けられた固定部材75、及び光ファイバ5に備えられたFBGセンサ52を含む。
(もっと読む)
物体検出装置および物体位置ずれ検出装置
【課題】特殊な構造の反射板を必要とせずに、半導体基板の有無を確実に検出する。
【解決手段】照射光(6)が反射板(5)で反射されたときの反射光(6a)から得られる反射点(Ra)の位置と、照射光(6)が半導体基板(S)で反射されたときの反射光(6c)から得られる反射点(Rc)の位置の違いを検出して、半導体基板(S)の有無を判定する。
【効果】特殊な構造の反射板を必要とせずに、半導体基板の有無を確実に検出できる。特殊な反射板を必要としないから、コスト高にならず、容易に実施できる。
(もっと読む)
光ファイバ位置特定のための光学マーキング部を備えた光ファイバセンサおよび光ファイバセンサの計測方法と光ファイバセンサ装置
【課題】本発明は、ひずみや温度変化が生じた光ファイバ位置を高い空間分解能で特定できる光ファイバセンサとその測定方法と光ファイバセンサ装置の提供を目的とする。
【解決手段】本発明は、光ファイバのコアに形成したFBGをセンサとし、該センサからのブラッグ反射光と参照用の反射端からの反射光の干渉強度の周期的変化から、前記センサの位置を特定するとともに、前記センサからのブラッグ反射光の波長の変化量から検知部のひずみや温度変化を計測する光周波数領域反射測定(OFDR)方式に用いられる光ファイバセンサであって、FBGからなるひずみや温度変化を計測するための複数のセンシング部1と、これら複数のセンシング部の間に設けられ、ひずみや温度変化をセンシングした光ファイバ位置を特定するための光学マーキング部3を具備してなることを特徴とする。
(もっと読む)
ディジタルビデオフィルタおよび画像処理
【課題】 フーリエ変換の必要性を除去し、したがって時間のかかる乗算および加算を除去する、ビデオディジタル色画素フィルタリングおよびディジタル画像処理のための装置。
【解決手段】 それは、単純なソフトウェアを活用して各プロセッサがリアルタイム対話型ディジタル画像処理のレーテンシ問題を最小にする、ファーストイン/ファーストアウトメモリと連動して動作する新しい分散型コンピュータアーキテクチャを活用する。この分散処理アーキテクチャは、FIFOが1台のプロセッサからもう1台に半分処理されたデータを伝える、工場組立てラインと同様の方法で動作するように設定される。独特のメモリベースのシステムが、6自由度で移動する移動オブジェクトの、距離および回転ベクトルを含む動きベクトルを測定するのに用いられる。
(もっと読む)
241 - 260 / 613
[ Back to top ]