
Fターム[2F065AA01]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734)
Fターム[2F065AA01]の下位に属するFターム
Fターム[2F065AA01]に分類される特許
101 - 120 / 613
干渉計測方法および干渉計測装置
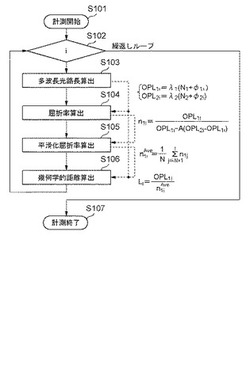
【課題】 干渉計測の応答速度を損なう事無く高精度な屈折率補正を実現可能な干渉計測方法を提供する。
【解決手段】 参照面で反射された光束と被検面で反射された光束との干渉信号を検出することによって被検光路の幾何学的距離を計測する干渉計測方法において、互いに波長が異なる複数の光束を用いて被検光路の光路長を算出する多波長光路長算出工程、多波長光路長算出工程で算出された被検光路の光路長から被検光路の空気の屈折率を算出する屈折率算出工程、屈折率算出工程で算出された屈折率を平滑化することによって平滑化屈折率を算出する平滑化屈折率算出工程、平滑化屈折率算出工程で算出された平滑化屈折率から被検光路の幾何学的距離を算出する幾何学的距離算出工程を有する事を特徴とする。
(もっと読む)
3次元複合機および3次元複製方法

【課題】立体物の複製を家庭やオフィス等で手軽に実現しする3次元複合機を提供する。
【解決手段】処理用空間としてのチャンバーと、3次元モデルデータに基づいて上記チャンバー内に立体物を造形可能な造形部30と、上記チャンバー内に載置された測定対象物を3次元測定して3次元モデルデータを取得可能な測定部20と、上記測定部20により取得された3次元モデルデータに基づいて上記造形部30に上記測定対象物の複製物を造形させる造形制御部とを備える3次元複合機10とした。
(もっと読む)
光学式変位計、光学式変位測定方法、光学式変位測定プログラム
【課題】2次元状に受光素子が配置された光学式変位計において、ワークに応じて安定した受光量を得ることを可能とする。
【解決手段】測定対象物WKに光を照射するための投光部3と、受光光量の強い領域での出力信号が飽和せずに抑えられるような受光特性曲線を有し、測定対象物WKからの反射光を受光して、第1の方向の各位置における受光信号として出力するための2次元受光素子15と、2次元受光素子15の受光特性曲線を調整するための受光素子制御部52と、受光素子制御部52により受光特性曲線が調整された2次元受光素子15からの受光信号を増幅するための増幅器と、投光部3からの照射光の反射光により、第1の方向の各点において増幅器で得られた増幅信号に基づき、測定対象物WKのプロファイル形状を演算可能なプロファイル演算部54とを備える。
(もっと読む)
計測装置
【課題】簡易な構成で参照面と被検物との間の絶対距離を高精度かつ高速に計測する。
【解決手段】第1の波長走査範囲について検出された第1の干渉信号による波数に対する前記第1の干渉信号の位相の傾きである第1の位相の傾きと前記第1の波長走査範囲に含まれる任意の波数における前記第1の干渉信号の位相である第1の位相の端数成分とを決定し第2の波長走査範囲について検出された第2の干渉信号に基づいて前記第2の波長走査範囲に含まれる任意の波数における前記第2の干渉信号の位相である第2の位相の端数成分を決定し前記第1の位相の傾きと前記第1の位相の端数成分と前記第2の位相の端数成分とにより第1の干渉次数差を決定し前記第1の干渉次数差と前記第1の位相の端数成分と前記第2の位相の端数成分とにより前記光束の波数に対する前記第1の干渉信号および前記第2の干渉信号を含む干渉信号の位相の傾きである第2の位相の傾きを決定する。
(もっと読む)
測定装置及び測定方法
【課題】 パターン投影法により、測定対象物の画像特徴と距離画像とを同時に取得することを目的とする。
【解決手段】 測定装置に、測定対象に投影するパターン光特性の照明光を設定するパターン光特性設定部112と、前記照明光を前記測定対象に照射したときの反射光を測定する反射光測定部120と、測定された前記反射光から測定対象の物理特性に応じた画像特徴を抽出する画像特徴抽出部130と、前記画像特徴の局所領域ごとの分布特性を算出する特徴分布算出部180と、算出された前記局所領域ごとの分布特性に応じて、距離計測用のパターン光特性と、画像特徴抽出用のパターン光特性とを含む前記照明光のパターン光特性を制御するパターン光制御部170とを備える。
(もっと読む)
撮像位置調整装置および撮像装置
【課題】撮像位置設定装置において、被写界深度が拡大された撮像レンズを通した撮像素子による撮像で得られる画像の品質をより高い品質で安定させる。
【解決手段】撮像レンズ10のレンズナイキスト周波数が撮像素子20のセンサナイキスト周波数の1倍以上、4倍以下である、被写界深度の拡大された撮像レンズ10を通して形成される光学像を、撮像素子20で撮像する際の撮像位置を定める際に、ピーク位置測定手段210により、撮像レンズ10における無限遠被写体についてのデフォーカスMTFピーク位置を測定し、判定手段280により、撮像レンズ10が、この撮像レンズ10のデフォーカスMTFピーク位置に関する複数の条件式を全て満足するものであることを判定し、位置設定手段290が、上記複数の条件式を全て満足すると判定された撮像レンズ10について、撮像位置に関する条件式を満足するようにその撮像位置を定める。
(もっと読む)
工具位置測定装置
【課題】微小な回転工具の刃先位置を、XYZ軸の3方向について高分解能かつ高精度に検出可能な工具位置測定装置を提供する。
【解決手段】回転工具12の刃先12aにZ軸方向の光を入射させ、その反射光を受光する第一光学装置22を備える。刃先12aをZ軸方向から見た底刃画像を撮像する第一撮像装置24と、底刃画像を基に、回転工具12の位置を測定する処理装置を備える。第一光学装置22は、X軸方向に照射光を発する第一光源30を有する。照射光をZ軸方向に偏向して刃先12aに入射させ、刃先12aからの反射光を逆向きのX軸方向に偏向する第一偏向ミラー38を有する。刃先12aと第一偏向ミラー38との間に、入射光及び反射光が通過する第一対物レンズ20を有する。第一撮像装置24は、第一偏向ミラー38によって偏向された刃先12aからの反射光による底刃画像を撮像する。
(もっと読む)
診断支援装置
【課題】胆道・膵管等の平坦な表面を有する生体内の内壁部において、病変部の疑いのある、「内壁部の表面(最表面)において乳頭状隆起が発生している領域」、及び、「内壁部の表面(最表面)においてランダムに細胞(上皮細胞)が増殖している領域」が存在する場合に、その領域を自動で検出して診断支援を行う診断支援装置を提供する。
【解決手段】OCT装置1の演算処理装置90は、立体構造データにより胆道・膵管の内壁部の表面の位置が検出され、その表面形状から面粗さが算出される。そして、面粗さが粗い領域が「内壁部の表面(最表面)において乳頭状隆起が発生している領域」、又は、「内壁部の表面(最表面)においてランダムに細胞(上皮細胞)が増殖している領域」として検出される。
(もっと読む)
搬送装置、記録装置および検出方法
【課題】ダイレクトセンシングにおける屈折率分布型レンズアレイの収差による搬送誤差を低減する搬送装置を提供する。
【解決手段】搬送ベルトに設けた複数の孤立点を含む検出用パターンと、前記検出用パターンを異なるタイミングで撮像して複数の画像データを取得する屈折率分布型レンズアレイを備えたイメージセンサと、前記複数の画像データの一の画像データから前記検出用パターンの一部であって、前記複数の孤立点のうち2以上の孤立点を含む1以上のテンプレート画像を切り出し、他の画像データから前記テンプレート画像と類似する領域を検索して前記搬送ベルトの移動状態を求める処理部と、を備え、前記2以上の孤立点は、一の孤立点と他の孤立点の結像位置が、前記屈折率分布型レンズアレイのレンズによる検出量ズレの周期性の半周期の位相差でずれた位置になるよう、前記検出用パターン上の一の孤立点と他の孤立点の位置を定めた、1組の孤立点を含む。
(もっと読む)
運転支援制御装置
【課題】Gセンサ(加速度センサ)を用いないコスト低減を図った安価な構成で自車両がこれから走行する路面勾配を事前に推定できるようにする。
【解決手段】単眼カメラ2により自車両1の進行方向を撮影し、勾配推定部3により、その撮影画像における先行車両のテールランプ部分の位置を判断し、判断された位置と基準位置との垂直方向の差から自車両1が走行する路面勾配を、Gセンサを用いることなく推定する。
(もっと読む)
反射型フォトセンサを用いた位置検出装置
【課題】磁気センサや大型マグネットを用いることなく、簡単な構成で、1mm以上の位置センシングが良好にでき、反射型フォトセンサの温度特性をキャンセルする。
【解決手段】1対の反射型フォトセンサPR1,PR2を対向配置し、この1対のフォトセンサ間に、可動体に取り付けられた両面反射板5を移動可能に配置し、これらフォトセンサPR1,PR2の2つの出力から反射板5の移動位置を検出する。この位置検出では、反射板の移動距離に応じてリニアな値が得られる演算式を用い、例えば1対の反射型フォトセンサの一方の出力をVo1、他方の出力をVo2とすると、(Vo1−Vo2)/(Vo1+Vo2)の演算式を用いて位置検出を行う。
(もっと読む)
表面検査装置および表面検査方法
【課題】処理負荷、処理時間の増大を抑制し、境界部分の表面欠陥をも取りこぼすことのない検査を可能とすること。
【解決手段】検査対象を有する物体を相対移動させながら撮像した検査対象の撮像画像に基づいて検査対象の表面検査を行う表面検査装置であって、検査対象の撮像画像に設定された検査領域内に更に設定される1〜複数のフィルタ領域のそれぞれに対して所定のフィルタ処理を行い、前回フィルタ処理画像と今回フィルタ処理画像との差分値であるフィルタ処理差分画像に対して、フィルタ領域ごとに画素単位でのしきい値処理を施した二値化画像(表面欠陥候補差分画像)を検査領域全体で統合した二値化画像(表面欠陥候補統合化差分画像)の画素値に前回の処理で得られた表面欠陥画像の画素値を加算することで得た二値化画像(表面欠陥候補統合化画像)を用いて表面欠陥の箇所および個数を特定する。
(もっと読む)
クロップ落下検出方法
【課題】水蒸気やミストが充満する環境下においても、粗バーからのクロップの分離、落下を精度良く容易に検出することができ、また仮にクロップがクロップシュートに引っ掛り、複数のクロップがクロップシュート上に停滞、堆積した場合であってもその状態を早期且つ確実に認識することができるクロップ落下検出方法を得る。
【解決手段】熱間圧延後における粗バー2の先端及び/又は後端に形成された不定形部を切断したクロップ4をクロップシュート5を通じて落下させるに際して、上記クロップシュート5の近傍に、該クロップシュート5の全幅を監視する遠赤外線検出装置7を設け、クロップシュート5を落下してくるクロップ4が放射する遠赤外線を該遠赤外線検出装置7により検出して、該落下してくるクロップの形状を熱画像として出力することにより、クロップの落下を検出する。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガラス管Gに照射し、ガラス管Gの外周面で反射する反射光及び内周面で反射する反射光をラインセンサ37で受光し、反射光の受光位置からガラス管Gの厚さを検出する。サーボ用レーザ光源40からガラス管Gに対して、サーボ用レーザ光を測定用レーザ光の光軸と測定用レーザ光の反射光の光軸との中心線の方向であるZ軸方向に照射する。フォトディテクタ48でガラス管Gからの反射光を受光し、Y軸方向サーボ回路120が、圧電アクチュエータ25を駆動することにより、測定用レーザ光の光軸がガラス管Gの中心軸と交差するように光ヘッド100をY軸方向にサーボ制御する。
(もっと読む)
パターン検査装置
【目的】パターン領域と非パターン領域の間に段差がある被検査試料であっても、効率的に検査可能なパターン検査装置を提供する。
【構成】パターン領域内に指定される被検査領域を記憶する被検査領域記憶部と、被検査試料上のパターン面高さ測定位置に対するパターン面高さ信号を検出するパターン面高さ検出部と、パターン面高さ検出部で検出されるパターン面高さ信号を用いて、被検査試料に対するフォーカスを合わせるオートフォーカス機構と、パターン面高さ測定位置が被検査領域内に位置するか否かを判定する判定部と、判定部が、パターン面高さ測定位置が被検査領域内に位置すると判定する場合にはオートフォーカス機構を駆動し、パターン面高さ測定位置が被検査領域内に位置しないと判定する場合にはオートフォーカス機構を停止するオートフォーカス機構制御部と、を有することを特徴とするパターン検査装置
(もっと読む)
伝熱管内面又は蒸発管内面の減肉状態監視装置
【課題】循環冷却水の磨耗による減肉に関する表面位置の変化取得を把握することができる伝熱管内面又は蒸発管内面の減肉状態監視装置を提供する。
【解決手段】伝熱管内面又は蒸発管内面の減肉状態監視装置10は、伝熱管又は蒸発管の減肉状態を監視する監視装置であって、伝熱管内面又は蒸発管内面のフィンチューブ11に沿って移動する移動手段12と、前記移動手段12に設けられ、伝熱管又は蒸発管の表面の減肉状態をレーザ計測するレーザ計測手段13と、レーザ計測手段13にレーザ光を導入する導光路及び反射光を伝達する導出路を備えたケーブル手段14と、前記レーザ計測のデータを過去のデータ又は標準データと比較して、現在の減肉状態を判定する減肉状態判定手段とを具備する。
(もっと読む)
三次元形状測定装置
【課題】測定物の上面も側面も10〜100ナノメートルの超高精度で走査測定できる三次元形状測定装置を提供する。
【解決手段】上面スタイラス1aは、エアスライド1cによりXY方向には振れずに測定物の上面を走査測定でき、第1のミラー1bとレンズ2deによりZ座標も精度良く測定でき、側面スタイラス2iaは、XY方向にのみ変位可能でZ方向には振れないので測定物の側面を走査測定でき、側面スタイラス2iaのZ座標測定は前記第1のミラー1bのZ座標測定値を利用して、より高精度に側面スタイラスのXY変位を傾斜角度測定部2jで測定することができる。
(もっと読む)
車載カメラの光軸検査方法及び光軸検査装置
【課題】より小型な空間で実施でき、検査中でも車両周囲で作業を実施できる車載カメラの光軸検査技術を提供することを課題とする。
【解決手段】(b)にて車載カメラ光軸検査は、開状態のフード21と車載カメラ20の間にターゲット120を位置決めし、ターゲット120に設けた赤色発光ダイオード121を用いて実施する。
【効果】カメラ光軸検査中に車両11前方でエンジンルーム235内の検査を実施できるため、車両周囲での作業員の動線が制限されない。加えて、フード21の開状態高さとターゲット120の移動距離を含んだ空間があればよく、車両前方に大型の鏡を設けて検査する場合に比べ、検査空間は小型で済む。よって、より小型な空間で実施でき、検査中でも車両周囲で作業を実施できる車載カメラの光軸検査技術を提供できる。
(もっと読む)
シート部材の歪み検査装置及びシート部材の歪み検査方法
【課題】シート部材の性状に左右されることなく、シート部材の表面における微少な歪みを検出することが可能なシート部材の歪み検査装置及び歪み検査方法を提供する。
【解決手段】シート部材2の一面2aに対向して配置され、一面2a上に、複数の点状またはスポット状の光被照射領域をマトリックス状に照射可能な光源3と、シート部材2の一面2aに対向して配置され、一面2aに照射された複数の前記光被照射領域の相互の間隔及び/または前記光被照射領域の照射範囲の形状を検出可能な検出装置4と、検出装置4によって検出された光被照射領域の相互の間隔及び/または光被照射領域の照射範囲の形状に基づいて、シート部材2の一面2aにおける歪みの有無を判定する判定手段と、を具備してなるシート部材の歪み検査装置1を採用する。
(もっと読む)
画像処理装置
【課題】撮像した画像を高い精度で高解像化することが可能な画像処理装置を提供する。
【解決手段】実施形態によれば、被写体と撮像素子の相対位置を異ならせて撮像した複数の画像を合成して高画素化を行う画像処理装置において、相対位置検出手段と、画像合成手段とを備える。相対位置検出手段は、被写体と標本図形の間の相対的な位置を固定した状態が撮影された複数の画像について、前記標本図形が写る部分を比較して、前記複数の画像間の相対位置を検出する。そして、画像合成手段は、相対位置検出手段が検出した相対位置に基づいて、前記複数の画像を合成するするようにしたものである。
(もっと読む)
101 - 120 / 613
[ Back to top ]