
Fターム[2F065AA01]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734)
Fターム[2F065AA01]の下位に属するFターム
Fターム[2F065AA01]に分類される特許
121 - 140 / 613
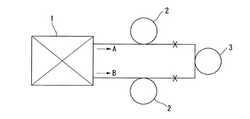
空孔付き光ファイバの空孔径、空孔位置、空孔表面荒さまたは曲げ損失の測定方法、空孔付き光ファイバの製造方法および空孔付き光ファイバ光線路の試験方法
【課題】空孔付き光ファイバの空孔径の測定に際して、空孔付き光ファイバを切断することなく、簡便にその空孔径、空孔位置、空孔の表面粗さ、曲げ損失などの特性値を知ることができるようにする。
【解決手段】空孔付き光ファイバ3の両端にレファレンス用光ファイバ2をそれぞれ接続し、この接続光ファイバ2の両端からから測定光をそれぞれ入射して後方散乱光を計測する双方向OTDR測定を行い、これにより得られた2つの後方散乱光波形からレファレンス用光ファイバ2部分における相加平均値Irefと、空孔付き光ファイバ3の位置xでの相加平均値Ihf(x)とを算出し、相加平均値Ihfと相加平均値Irefとの差分(Ihf−Iref)ΔIを求め、予め求められた差分ΔIと空孔付き光ファイバ3の空孔径との相関関係に基づいて、位置xにおける空孔径、空孔径、空孔位置、空孔の表面粗さ、曲げ損失を求める。
(もっと読む)
自己参照干渉計、アライメントシステムおよびリソグラフィ装置

【課題】既知のアライメントシステムの不利な点は、アライメント測定システムの自己参照干渉計が比較的高価となりうることである。
【解決手段】自己参照干渉計は、アライメントビームを分割して参照ビームおよび変性ビームを生成する光学システムを含む。光学システムは、参照ビームの回折次数が変性ビームの対応する反対の次数と空間的に重なり合うよう、参照ビームおよび変性ビームを合成するビームスプリッタを含む。ディテクタシステムは、光学システムから空間的に重なり合う参照ビームおよび変性ビームを受け、位置信号を決定する。ディテクタシステムは、それらビームが干渉するようそれらビームの偏光を操作し、干渉する参照ビームおよび変性ビームをディテクタに導く偏光システムを含む。ディテクタでは、干渉するビームの強度の変化から位置信号が決定される。
(もっと読む)
レーザ加工機用機上計測装置
【課題】レーザ加工用光源の微弱光を測定用光源に用いたレーザ加工機用機上計測装置を提供する。
【解決手段】機上計測装置は、台座上に移動自在に設けられた機上計測装置用ステージ6を備え、機上計測装置用ステージ6には、微弱連続光を分光して基準光軸とする分光手段及び前記基準光軸により機上測定装置の位置決めを行う位置決め機構2と、微弱連続光の加工対象物7からの反射光を分光する分光手段4、5及び前記分光された反射光により加工対象物の表面形状の変位を検出する変位検出機構3とを備え、加工時には機上計測装置用ステージ6を移動して加工用レーザ光から前記両分光手段4、5を退避させ、測定時には機上計測装置用ステージ6を移動して微弱連続光からの前記基準光軸を用いて位置決め機構2により機上計測装置用ステージ6を照射光軸に対して位置決めし、変位検出機構3により加工対象物7の表面形状の変位を検出する。
(もっと読む)
光学式検出システム、電子機器及びプログラム
【課題】対象物の座標情報を検出し、キャリブレーション処理を行って、座標情報に対応付けられたコマンドやデータの入力等の操作指示を与えることができる光学式検出システム、電子機器及びプログラム等を提供すること。
【解決手段】光学式検出システムは、照射光LTが対象物OBにより反射することによる反射光LRの受光結果に基づいて、対象物OBの座標情報を検出する座標情報検出部110と、座標情報の検出についてのキャリブレーション処理を行うキャリブレーション部120とを含む。座標情報検出部110は、対象物OBが検出されるエリアである検出エリアRDETがX−Y平面に沿った対象面に対して設定される場合に、少なくともZ方向での座標情報であるZ座標情報を検出する。キャリブレーション部120は、Z座標情報についてのキャリブレーション処理を行う。
(もっと読む)
カメラ校正装置
【課題】自動改札機等のゲートに取り付けられたステレオカメラ等の校正で校正用マーカを簡単に設置でき、校正作業の手間を軽減きるようにしたカメラ校正装置を提供する。
【解決手段】カメラ校正装置は、ゲート通路11を有しかつカメラ12A,12Bと物体検知センサ13を備えるゲート10でカメラの校正を行うカメラ校正装置であって、ゲート通路を自在に移動する台車21と、高さ位置が既知であるマーカ22A,22B,22Cが取り付けられたマーカ支柱22を備える校正用マーカ装置20と、物体検知センサで校正用マーカ装置の位置を検知したとき、カメラの撮影で得た画像情報からマーカの情報を取り出し、マーカの情報に基づき校正用カメラパラメータを算出するカメラ校正用処理装置14とを備える。
(もっと読む)
樹脂製キャップ内部品の検査装置および樹脂製キャップ内部品の検査方法
【課題】 樹脂製キャップに収容された部品の位置や形状を明確に把握することができるような樹脂製キャップ内部品の検査装置および樹脂製キャップ内部品の検査方法を提供する。
【解決手段】 照明手段32がカメラ31の撮像方向とは異なる方向から樹脂製キャップ20の外面に光を照射し、カメラ31が樹脂製キャップ20の開口部201側から樹脂製キャップ20内部の画像をカラーで取り込むので、アルミシール22からの反射光をカメラ31が取り込むのを回避でき、明確な画像を得ることができる。そして、画像処理手段33が、カメラ31により明確に取り込まれたカラー画像を2値化して内蓋21の外形および注ぎ穴211の形状を検出するので、樹脂製キャップ20に収容された部品の位置や形状を明確に把握することができる。
(もっと読む)
マスクの位置決め装置及びマスクの回転中心算出方法
【課題】マスクステージの回転中心の座標を精度良く求め、これによりマスクと基板との位置決めを高精度で行うことができるマスクの位置決め装置及びマスクの回転中心算出方法を提供する。
【解決手段】位置決め装置70は、回転機構16xを具備するマスクステージ10と、マスクM及び基板Wに設けられた複数のアライメントマークMm、Wmを検知するための複数のアライメントカメラ18と、アライメントカメラ18により得られた画像を用いて各アライメントマークMm、Wmの位置が合うようにマスクステージ10の動作を制御する制御装置71と、を備える。アライメントカメラ18は、各アライメントカメラ18にそれぞれ対応するアライメントマークMm、Wmを撮像し、マスクステージ10を回転させた後、各アライメントマークMm、Wmを再度撮影して、マスクステージ10の回転中心Eの座標を算出する。
(もっと読む)
光学デバイス
【課題】視差ずれを容易に低減可能な画像を撮像できる光学デバイスを提供すること。
【解決手段】光学デバイスは、撮像光に対して第1の光学特性を持つ少なくとも1つの第1レンズを有する第1撮像系と、撮像光に対して第2の光学特性をそれぞれ持ち、互いに異なる光軸を持つ複数の第2レンズを有する第2撮像系とを備え、複数の第2レンズのそれぞれの光軸は、第1レンズの光軸位置の重心を中心として同心円上に位置し、複数の第2レンズの光軸位置の重心が第1レンズの光軸位置の重心に位置する。複数の第2レンズを通じて撮像された複数の画像を重ね合わせた重ね合わせ画像と、第1撮像系で得られた画像とを合成してよい。
(もっと読む)
光センサー
【課題】光センサーの光学系において1/4波長板が出射光に位相のずれを生じる場合でも、確実に直線偏光を円偏光に変換する。
【解決手段】振動検出用光センサー1は光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5及び1個の受光素子6を備える。波長板ユニットは一体化した1/4波長板7と振動板8と位相補正素子9とからなる。位相補正素子は透明基板間に挟持した液晶層13からなり、1/4波長板の出射光に位相のずれを生じる場合に、動作温度に対応した電圧を液晶層に印加してリタデーション値を変化させ、直線偏光を完全な円偏光に変換する。受光素子はその光軸x2を反射光の光軸x1と平行かつ僅かにずらして配置され、入射するビームスポット形状がその中心cを受光面6aの中心Oから僅かにずらした位置に投影されるので、検出される光量が振動板の変位に対応して増減する。
(もっと読む)
点群位置データ処理装置、点群位置データ処理システム、点群位置データ処理方法、および点群位置データ処理プログラム
【課題】オクルージョンが解消される新たな視点の位置を決めるための情報を作業者に提供する技術を提供する。
【解決手段】測定対象物の点群位置データを取得する点群位置データ取得部111、測定対象物の画像データを取得する画像データ取得部112、第1の視点において取得された点群位置データと第1の視点とは異なる第2の視点において取得された画像データとの対応関係を求める対応関係特定部113、点群位置データから三次元モデルを形成する三次元モデル形成部114、この三次元モデルを画像表示装置に表示するための制御を行う三次元モデル表示制御部115を備えている。ここで、三次元モデル形成部114は、対応関係特定部113で特定された対応関係に基づき、第2の視点から見た向きの三次元モデルを形成する。この第2の視点から見た三次元モデルが作業者に画像として提示される。
(もっと読む)
変位センサ
【課題】計測データの移動平均演算のデータ数として、ユーザが目標とする応答時間や検出データの精度を確保するのに適した値を自動的に求め、登録できるようにする。
【解決手段】変位センサ1を動作させる上での条件を示すパラメータとして、応答時間の目標値および検出誤差の許容値の少なくとも一方の入力を受け付けて、ワークのモデルを用いたティーチング処理を実行する。ティーチング処理時のCPU110は、投光部101および受光部102による検出処理を繰り返しながら最大露光時間を決定すると共に、変位量の計測データのばらつきを算出し、最大露光時間および計測データのばらつきを用いた演算処理により、入力されたパラメータの値に適した移動平均演算のデータ数を導出する。このデータ数はメモリ111に登録され、通常の動作モードにおける移動平均演算に用いられる。
(もっと読む)
干渉測定装置及び測定原点決定方法
【課題】 測定後の原点を高精度に設定することができ、被測定物の変位情報(絶対変位情報)を高精度に測定することができる干渉測定装置を得ること。
【解決手段】 第1光源手段からの第1の光束と第2光源手段からの第2の光束を合波する第1の合波手段と、第1の光束と第2の光束が合波された光束を、2つの光束に分割し、一方の光束を被測定物の測定面に入射させ、他方の光束を参照面に入射させ、測定面からの反射光束と参照面からの反射光束を合波する光学系と、
測定面と参照面からの反射光束とに含まれている分割された2つの第1の光束により形成される光束と、2つの第2の光束により形成される光束を受光する受光手段と、
受光手段で受光した第1の光束に基づく第1の信号と受光手段で受光した第2の光束に基づく第2の信号とを用いて測定原点を決定する決定手段を有すること。
(もっと読む)
不要ワニスの検査装置及び検査方法
【課題】ステータコアに付着した不要ワニスを容易かつ正確に検知することができる不要ワニス検査装置を提供すること。
【解決手段】ステータコア80に設けたコイル7に電気的絶縁性を維持するためのワニス9を含浸させてなるステータ8における、ステータコア80の表面に付着した不要ワニス99を検知する装置であって、不要ワニス99を励起発光させることが可能な検査光50を、ステータコア80の表面の検査領域に向けて照射する光源5と、ステータコア80の表面の検査領域を撮影するためのカメラ6と、カメラ6を通して採取した画像データを解析して不要ワニス99の付着位置を特定する判定手段45と、検査光50がステータコア80の軸方向端面81から突出したコイルエンド部70に照射されることを防止するためにコイルエンド部70の少なくとも一部を覆うマスク部3とを有する。検査光50は紫外線であることが好ましい。
(もっと読む)
架線位置測定装置
【課題】効率よく正確に架線の位置を測定することができる架線位置測定装置を提供する。
【解決手段】架線位置測定装置において、架線を撮影する第1のラインセンサカメラ1及び第2のラインセンサカメラ2と、架線までの距離を計測するレーザ距離計3と、第1のラインセンサカメラ及び第2のラインセンサカメラから出力された画像データを基にラインセンサ画像上の架線の位置情報を算出する第1の画像処理部10及び第2の画像処理部11と、ラインセンサ画像上の架線の位置情報とレーザ距離計3から出力された距離情報とを記憶する処理メモリ12と、ラインセンサ画像上の架線の位置情報と距離情報とに基づきステレオ対応点の探索を行うステレオ対応点探索部13と、探索したステレオ対応点に基づき架線の高さと偏位を算出する高さ・偏位算出部14とを備えた。
(もっと読む)
移動体制御システム、プログラム、及び移動体制御方法
【課題】複数の撮像部が撮像したそれぞれの画像に基づいて移動体を制御する移動体制御システムにおいて、それぞれの撮像部に対して定められたそれぞれの撮像座標系の対応関係の精度を向上させる。
【解決手段】第1回転中心位置特定部62がそれぞれの第1画像に含まれるそれぞれの第1基準目印に基づいて、第1撮像座標系における第1点に対応する第1回転中心位置を特定する。第2回転中心位置特定部64がそれぞれの第2画像に含まれるそれぞれの第2基準目印に基づいて、第2撮像座標系における第1点に対応する第2回転中心位置を特定する。座標系対応関係保持部66が第1回転中心位置及び第2回転中心位置に基づく第1撮像座標系及び第2撮像座標系の対応関係を示す座標系対応関係を保持する。
(もっと読む)
測定装置、位置測定システム、測定方法、較正方法及びプログラム
【課題】光を用いて物体までの距離を測定した測定結果において、所定の対象物に関する測定結果を特定することを可能とすること。
【解決手段】物体までの距離を光の照射によって測定点毎に測定する測定装置であって、測定点毎の距離を表す距離情報と、測定点毎の受光量を表す受光量情報と、を取得する光学式距離測定部と、受光量情報において、光量が閾値を超える測定点を、光源方向に対して多くの入射光を反射する反射面を有する対象物に対応する測定点であると判定する対象判定部と、対象判定部によって判定された測定点の距離に基づいて、自装置の基準点を原点とするローカル座標系における対象物の位置を算出し、当該ローカル座標系における位置と、同一の対象物のグローバル座標系における位置とに基づいて、較正を行う較正ステップと、を備える。
(もっと読む)
カメラのキャリブレーション方法
【課題】人手によるミスの排除、処理時間の短縮、精度の向上を図る。
【解決手段】市松模様のチェックパターン4Aの中心部のマス目に基準マーク4Bを設けてキャリブレーションパターン4とする。基準マーク4Bが入るようにキャリブレーションパターン4を少なくとも3方向から撮影する。画像処理装置5は、自動的に、撮像されたキャリブレーションパターン4のそれぞれにおいて、任意の四角形を形成するように任意のマス目の交点座標を検出し、この検出された交点座標に基づいて各マス目の交点候補位置を算出し、算出した交点候補位置から各マス目の交点座標を推定し、推定した各マス目の交点座標に基づいて、基準マーク4Bの位置を座標基準として、撮像されたキャリブレーションパターン4と実際のキャリブレーションパターン4との間のH行列の本行列を算出し、これら算出した本行列からキャリブレーションパラメータを算出する。
(もっと読む)
形状計測装置、形状計測方法、および半導体パッケージの製造方法
【課題】被計測物に損害を与えずに、被計測物の形状を正確に計測する。
【解決手段】形状測定装置11は、スペックルパターン2が投影された被計測物1を撮像する撮像装置13、14を備え、撮像装置13で撮像された画像と、撮像装置14で撮像された画像とから被計測物1の形状を計測するものである。被計測物1に対して、スペックルパターン2を白色光によって投影する投影装置12を備えている。撮像装置13と撮像装置14は、撮像装置13で撮像された被計測物1の画像と、撮像装置14で撮像された被計測物1の画像とが互いに角度がずれて撮像される位置に、配置されている。
(もっと読む)
被写体3次元モデルを構築する方法およびプログラム
【課題】高精度な被写体シルエット画像を必要とせず、さらに、各視点においては2値のシルエット抽出を行わずに、多視点映像をもとに高精度な被写体の3次元モデルを構築する方法を提供する。
【解決手段】本発明の方法は、複数の背景画像の画素値と複数の被写体画像の画素値とから、ボクセル空間中の各ボクセルの背景尤度を表す連続値を算出し、各ボクセル間の隣接関係を考慮したエネルギー関数を定義し、これを最小化するように、各ボクセルに被写体領域または背景領域のいずれかに割り当てることで、被写体領域を決定し、ボクセルデータを構築する。
(もっと読む)
計測装置
【課題】 真空チャンバー内に配置される計測装置において計測光学系等を好適に使用することを目的とする。
【解決手段】 真空チャンバー内に配置される計測装置であって、
真空チャンバーの内部に配置され、基板の位置または高さを計測する計測光学系と、
計測光学系の少なくとも一部を密封して覆うカバーと、カバー内に気体を供給および排出するための配管と、
配管を介してカバー内に供給または排出される気体の量を制御することによってカバー内の圧力を制御する圧力制御手段と、
を備え、カバーには透明板が設けられ、
圧力制御手段は、カバー内の圧力変動を抑え、かつ、カバー内外に所定の圧力差が生じるように気体の量を制御し、
計測光学系は、圧力差によって透明板が変形することによって生じる収差を補正するように構成されることを特徴とする。
(もっと読む)
121 - 140 / 613
[ Back to top ]