
Fターム[2F065AA53]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 輪郭 (4,339) | 3次元的 (2,562)
Fターム[2F065AA53]の下位に属するFターム
面上パターン (159)
Fターム[2F065AA53]に分類される特許
141 - 160 / 2,403
表面形状測定装置
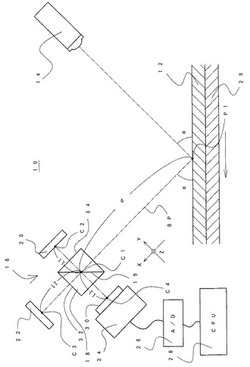
【課題】表面形状測定装置の配線系統をできるだけ省き、装置の簡素化を図る。
【解決手段】表面形状測定装置10は、測定対象物12の表面に光を照射する光源14と、測定対象物12の表面上の反射点P1からの反射光を第一の反射光と第二の反射光に分離するビームスプリッタ18と、第一の反射光を反射する第一のミラー20と、第二の反射光を反射する第二のミラー22と、を備えている。さらに、第一のミラー20から反射した第一の反射光及び第二のミラー20から反射した第二の反射光を受光する撮像面30を備える撮像器24を備えている。この撮像器24は、ビームスプリッタ18から第一のミラー20を経由して撮像面30まで到る光路長とビームスプリッタ18から第二のミラー22を経由して撮像面30まで到る光路長とが異なるように配置されている。
(もっと読む)
3次元計測装置

【課題】被計測物を搬送するとともに、被計測物の3次元形状の全周を搬送の途中で停止させることなく非接触で計測することのできる3次元計測装置を提供する。
【解決手段】搬送経路の途中に被計測物Wの搬送方向Aに対して直交する左右方向に沿って計測隙間13が設けられた搬送装置3と、計測隙間13を通過する被計測物Wのステレオ画像を少なくとも計測隙間13の上方および下方のそれぞれで予め設定された計測周期毎に光学的に読み取ってステレオ画像を撮像し、そのステレオ画像の画像データを撮像し、それぞれのステレオ画像を画像データに変換してデータ処理装置5に出力するステレオカメラ21を有する撮像装置4と、ステレオカメラ21により計測周期の1周期毎に撮像されたそれぞれの画像データを合成する処理を連続して行うデータ処理装置5とを設ける。
(もっと読む)
3次元形状測定方法および基板検査方法
【課題】3次元形状測定装置および測定方法を提供すること。
【解決手段】3次元形状測定方法は、測定対象物の第1測定領域で第1画像を撮影する段階と、第1中央処理ユニットを通じて前記第1画像を演算処理し、前記第1測定領域での3次元形状を算出する段階と、前記第1中央処理ユニットが前記第1画像を演算処理する間に、前記測定対象物の第2測定領域で第2画像を撮影する段階と、第2中央処理ユニットを通じて前記第2画像を演算処理し、前記第2測定領域での3次元形状を算出する段階と、を含む。これにより、3次元形状の測定時間を短縮させることができる。
(もっと読む)
3次元形状計測装置およびロボットシステム
【課題】3次元形状の計測処理を高速化すること。
【解決手段】スリット状の光線を計測対象物に対する照射位置を変更させながら照射する照射部と、前記光線が照射された前記計測対象物を順次撮像する撮像部と、前記撮像部によって撮像された画像を走査することによって前記画像における前記光線の位置を検出する位置検出部と、前記位置検出部による走査対象の画像よりも以前に前記撮像部によって撮像された画像における前記光線の位置に基づいて前記走査対象の画像における走査領域を決定する走査領域決定部とを3次元形状計測装置へ設ける。
(もっと読む)
距離画像カメラおよびこれを用いた対象物の面形状認識方法
【課題】様々な形状の箱などが混載されている場合であっても、それらを正確に分離して認識可能な距離画像カメラおよびこれを用いた対象物の面形状認識方法を提供する。
【解決手段】対象物へ向けて光を照射する発光部11と、反射光が戻ってくるまでの時間の測定値から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、取得した前記距離画像の各画素の前記距離情報が前記距離画像カメラからの距離を複数に分割した距離区間のいずれに対応するかを判定し、前記距離区間毎に前記距離情報が対応する画素数をそれぞれ集計した集計結果が最大であった前記距離区間いずれかを選択するとともに、そうして選択された前記距離区間のみに前記距離情報が対応する画素の2次元配置位置に基づいて前記対象物が前記距離画像カメラに対向している面の形状を認識する画像処理を行う演算制御部13とを備える。
(もっと読む)
形状測定装置、形状測定方法、及びそのプログラム
【課題】検出部を被検物に対して移動させて測定位置毎に停止させて測定する場合の測定速度を向上させることができる形状測定装置を提供する。
【解決手段】形状測定装置は、被検物に対しての相対位置が変更されて被検物の表面の形状を検出する検出部(20)と、検出部により検出された被検物の表面の形状の変位を示す情報に基づいて、被検物に対して検出部が相対的に静止しているか否かを判定する判定部(静止判定部58)と、判定部により検出部が相対的に静止していると判定された場合の形状に基づいて、被検物の表面の形状データを算出する算出部(座標算出部53)と、を備える。
(もっと読む)
目視される物体の表面に関する3次元データの品質の指示を表示するための方法およびデバイス
【課題】目視される物体の表面に関する3次元データの品質の指示を表示するための方法およびデバイスを提供する。
【解決手段】目視される物体202の表面210の画像500を獲得して、表示するステップであって、画像500の複数のピクセル231、232、233、234は、目視される物体202上の複数の表面ポイント221、222、223、224に対応する、ステップと、複数の表面ポイントに対応する複数のピクセルの各ピクセルに関して、ピクセルに対応する表面ポイントに関する3次元座標が利用可能性であるかどうかを判定するステップと、ピクセル231に対応する表面ポイント221に関する3次元座標が利用可能でない各ピクセル231に関する第1のオーバーレイ250を表示するステップとを備える方法。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
撮像対象物の境界検知装置および境界検知方法
【課題】距離画像カメラとこれより高解像度の赤外カメラなどを組み合わせることで撮像対象物の境界などを的確に検知可能な境界検知装置および境界検知方法を提供する。
【解決手段】第1光を照射する第1発光部11aと、その反射光が戻ってくるまでの時間の測定値から算出される距離情報を2次元配置された第1種画素毎に有する距離画像を取得する第1撮像部11bと、撮像光軸が平行になるように配置されるとともに前記距離画像の前記第1種画素より多数の2次元配置された第2種画素毎に階調情報を有する通常画像を取得する第2撮像部12aと、これらを制御するとともに前記距離画像および前記通常画像に対する演算処理を行う演算制御ユニット13とを備え、この演算制御ユニット13は輪郭抽出部、輪郭対応画素抽出部、最短距離画素暫定選択部、最短距離画素選択確定部および輪郭認識部を有する。
(もっと読む)
展開図生成装置、展開図生成方法及び展開図表示方法
【課題】トンネルの壁面がどの程度の高さの凹凸を持つかを知ることが可能な技術を提供することを目的とする。
【解決手段】展開図生成装置は、記憶装置1と、変換装置2と、照合装置3と、変位形状生成装置4と、描画装置5とを備える。変換装置2は、壁面42の複数の計測点7を壁面42の展開図に配置する座標変換を行う。変位形状生成装置4は、座標変換された複数の計測点7の座標に基づいて、壁面42の展開平面17に、当該展開平面17に直交する方向の座標wの値を反映した凹凸形状が付与されてなる変位形状41を生成する。描画手段5は、変位形状41に、画像9のパターンを描画する。
(もっと読む)
形状測定装置、形状測定方法、及びそのプログラム
【課題】穴のある被検物に対して、その穴の内側の形状を効率よく適切に測定することができる形状測定装置を提供する。
【解決手段】中空状の被検物の内面に測定光を照射するとともに、該被検物に照射した測定光を受光して、被検物の形状を測定する形状測定装置は、被検物に照射するライン状の測定光を出力する光出力部と、光出力部と隔てて設けられ、予め定められた方向から受光する測定光の散乱光を検出する受光部と、測定光を検出する位置に応じて受光部の位置が調整され、照射した光の出力位置と、受光部の位置との距離に応じて被検物との距離を算定する制御部と、を備える。
(もっと読む)
情報処理プログラム、情報処理方法、情報処理装置および情報処理システム
【課題】マーカを精度良く認識する点について改善された情報処理プログラム等の提供。
【解決手段】情報処理装置のコンピュータを、画像を逐次取得する画像取得手段、取得された画像から特定対象を検出する特定対象検出手段、検出された特定対象の中央領域から得られた画素値に基づいて、当該中央領域に関連する第1領域情報を検出する第1領域情報検出手段、その検出結果が所定の条件を満たすか否かを判定する第1判定手段、特定対象のうち中央領域の周辺に存在する周辺領域から得られた画素値に基づいて、当該周辺領域に関連する第2領域情報を検出する第2領域情報検出手段、および少なくとも、第1判定手段による判定結果が肯定である場合に第2領域情報検出手段により検出された第2領域情報を出力する出力手段として機能させるための情報処理プログラム。
(もっと読む)
形状測定装置
【課題】複雑な形状の被測定物に対して精度を高めて測定する。
【解決手段】形状測定装置(100)は、被測定物にライン光を照射する光照射部(21)及びライン光の照射方向とは異なる方向から被測定物に照射されたライン光を検出する光検出部(22)を有するセンサー部(2)と、光検出部(22)からの検出結果に基づいて被測定物の形状を測定する形状測定部(53)と、センサー部(2)と被測定物とを相対移動させる駆動部(11)と、測定方向に相対移動する間に形状測定部(53)によって得られた複数回の測定の結果に基づいて、測定時のセンサー部(2)と被測定物との少なくとも一方の姿勢を制御する測定制御部(56)とを備える。
(もっと読む)
画像合成のための3次元プロファイルマップの作成方法
【課題】光学顕微鏡を用いて、一つの立体的な試料に対して、焦点距離の異なる多数の画像を得、これらの画像を組み合わせて、全領域の焦点が合った1枚の2次元合成画像を得るため、試料の高さ情報を表示する3次元プロファイルマップの作成方法を提供する。
【解決手段】試料を異なる高さから撮像して、焦点部位の異なる2次元試料画像を得、離散ウェーブレット変換を行うことにより得られた詳細サブーバンドにおいて、最大の詳細サブーバンド係数値を示す画像の撮像高さで、初期の高さ地図を作成し、それぞれの入力画像において、焦点整合度を計算し、フィルターをかけて、非合焦点のピクセル(非境界点)の高さ情報は除去し、除去されたピクセル(非境界点)の高さを、フィルターを通過したピクセル(境界点)の高さ値から内挿して算出し、前記高さ情報の除去されたピクセルに対して前記内挿によって算出された高さを代入して高さ地図を作成する。
(もっと読む)
表面性状測定装置および表面性状総合評価方法
【課題】鏡面に近い面の表面性状を、それぞれの製品あるいは業界に特有の感性に近い指標に基いて定量的且つ総合的に評価できるようにする。
【解決手段】コンピュータ制御にてディスプレイ11に表示したチェックパターンを被測定面21に投影して、反射像を撮影装置12により撮影し、その画像データを収得してコンピュータ3でデータ処理するよう構成した鏡面計1を使用し、コンピュータ3に、鏡面度、鏡面度バラツキ、光沢度、シャープネス、うねり又は形状誤差、コントラストおよび白濁度といった複数の測定項目の算出ロジックを含むコンピュータソフト5を組み込んで、それら複数の測定項目を順次自動的に測定し、鏡面度を含む複数の測定項目を指標として表面性状を評価できるようにする。
(もっと読む)
三次元計測装置および三次元計測方法
【課題】 最適パターン光投影のような強度変調パターン光投影手法による静止物体の三次元画像計測を行う。
【解決手段】 ワークWにパターン光を投影するパターン投影機21と全面照明機22と、パターン光が投影されたワークWを撮像して画像を撮像するカメラ23、24により撮像した画像のデータを処理するデータ処理装置42とから構成され、パターン投影機21によりパターン光を投影して画像を撮影する第1撮像モードと、全面照明機22による全照明反射画像を撮像する第2撮像モードがワークWの種類の特定によって判定される。その撮像結果によって三次元情報が算出されるので、精度の高い三次元情報を得ることができる。
(もっと読む)
形状測定装置
【課題】プローブを交換する事無く種々の測定精度を得ることができる形状測定装置を提供すること。
【解決手段】第1のライン光を測定物に照射する第1光学系と、第1光学系の少なくとも一部の光学素子を有し、第1のライン光よりも長い第2のライン光を測定物に照射する第2光学系とを有する光照射部と、前記測定物による前記第1のライン光の散乱光を検出する第1の検出部と、前記測定物による前記第2のライン光の散乱光を検出する第2の検出部と、を備える形状測定装置である。
(もっと読む)
変位センサシステム及び変位センサ
【課題】常に、受光量が最大値を示すピーク画素からの受光信号を利用する構成に比べて、検出可能な対象物の制約を抑制することが可能な技術を提供する。
【解決手段】変位センサシステムは、受光信号に基づき指定された少なくとも1つの領域について、当該領域内において受光量がピークを示す画素であるピーク画素が複数存在する場合、当該複数のピーク画素の中からいずれかを、選択画素として選択するピーク選択部と、上記少なくとも1つの領域について、ピーク選択部で選択された選択画素からの受光信号に基づき投受光感度を設定する感度設定部と、各領域内の走査線の受光信号を、当該領域に対応する投受光感度下で前記受光処理部に取り出させ、その取り出された受光信号に応じた検出処理を実行する受光制御部と、を備える。
(もっと読む)
3次元計測装置、および3次元計測方法
【課題】偏光解析を用いながら、複数の傾斜面の各傾斜方向の違いを識別できる3次元計測装置、および3次元計測方法を提供する。
【解決手段】3次元演算部4の傾斜算出部41は、ワーク台座6によってカメラ3の撮像方向とワークWの表面との相対角度を第1の状態に設定してカメラ3が生成した撮像データに基づいて、透過光L3の偏光状態を検出し、この検出した偏光状態に基づいて、ワークWの表面の第1の傾斜角および第1の方位角を求め、ワーク台座6によって相対角度を第1の状態から第2の状態に変化させた後にカメラ3が生成した撮像データに基づいて、透過光L3の偏光状態を検出し、この検出した偏光状態に基づいて、ワークWの表面の第2の傾斜角および第2の方位角を求め、傾斜補正部42は、第1の傾斜角と第2の傾斜角との差に基づいて、第1の傾斜角または第1の方位角を補正する。
(もっと読む)
ステレオカメラの配置方法とそのシステム
【課題】
計測対象物が遮蔽物によって遮蔽されている対象物を三次元計測する場合に、輪郭付近に見えている画像すべての点を使えるように、効率よく十分な候補点数を確保し、三次元計測を可能とするカメラ配置方法を提供する。
【解決手段】
本発明におけるカメラ配置方法は、遮蔽物の第一の輪郭線を近似することで得られる直線と第一のカメラの投影中心の位置とを有する第一のエピポーラ面と、第二の輪郭線を近似することで得られる直線と第一のカメラの投影中心の位置とを有する第二のエピポーラ面による交線を算出し、交線上に第二のカメラの投影中心を配置する。
(もっと読む)
141 - 160 / 2,403
[ Back to top ]