
Fターム[2F065AA53]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 輪郭 (4,339) | 3次元的 (2,562)
Fターム[2F065AA53]の下位に属するFターム
面上パターン (159)
Fターム[2F065AA53]に分類される特許
121 - 140 / 2,403
物品認識装置、物品認識システム、プログラムおよび物品認識方法
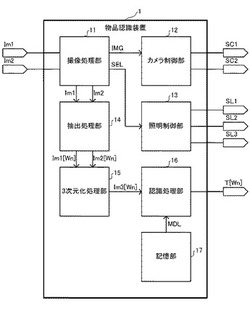
【課題】 表面に光沢がある複数の物品をステレオカメラを用いて認識する。
【解決手段】 認識対象の複数の物品からなる物品群を撮像する第1および第2カメラを備えたステレオカメラを制御するカメラ制御部と、物品群を互いに異なる方向から照明する第1ないし第3照明装置を制御する照明制御部と、第1ないし第3照明装置のうちの何れか1つを順次点灯させて、ステレオカメラによってそれぞれ撮像された一対の2次元画像からなる第1ないし第3画像対を取得する撮像処理部と、第1ないし第3画像対に含まれる少なくとも1つの2次元画像から物品をそれぞれ含む領域を抽出する抽出処理部と、領域ごとに、第1ないし第3画像対のうち第1および第2カメラ間の受光量の差が所定値以下である画像対に基づいて物品の3次元画像を生成する3次元化処理部と、3次元画像に基づいて物品を認識して位置・姿勢情報を算出する認識処理部と、を有する。
(もっと読む)
3D表面形状をキャプチャーするための方法およびシステム

【課題】変形表面のキャプチャーを高解像度で得る。
【解決手段】シーンの3D画像データをキャプチャーするシステムにおいて、各々が互いに異なる波長の光を照射し、キャプチャーすべきシーンを照明するよう構成された三つの光源と、前記シーンから反射された前記光源からの光を受光するよう構成され、各光源から受光された光を分離し、前記三つの光源ごとにキャプチャーされた前記画像に関するデータを出力する第一ビデオカメラと、前記シーンの第一デプスマップをキャプチャーするよう構成されたデプスセンサと、前記第一ビデオカメラからデータを受信し、該データを処理して前記三つの光源ごとにキャプチャーされた前記画像から得られた法線領域に関するデータを取得する解析ユニットにおいて、前記法線領域に関する前記データを前記第一デプスマップのデータに合成して、前記シーンの3D画像データをキャプチャーする前記解析ユニットとを備える。
(もっと読む)
三次元計測装置
【課題】三次元計測を行うにあたり、計測効率の低下を抑制しつつ、計測精度の向上等を図ることのできる三次元計測装置を提供する。
【解決手段】基板検査装置10は、プリント基板1を搬送するコンベア13と、プリント基板1の表面に対し斜め上方から所定の光を照射する照明装置14と、当該光の照射されたプリント基板1を撮像するカメラ15とを備えている。照明装置14は、第1照明14A〜第8照明14Hを備えている。そして、三次元計測を目的として第1輝度のパターン光の下で複数回の撮像が行われる合間に、三次元計測を目的とした第2輝度のパターン光の下での複数回の撮像や、輝度画像データを取得することを目的とした第1輝度及び第2輝度の各色成分の均一光の下での撮像が行われる。
(もっと読む)
移動環境認識装置及び方法
【課題】高速、且つ高精度に測定対象の形状認識情報を得ることができる移動環境認識装置を提供する。
【解決手段】測定対象7に対して円錐走査を行う円錐走査手段1を備えている。円錐走査手段は、移動環境検出器3と、この移動環境検出器で計測した情報を加工する外界認識装置9を備えている。この外界認識装置は、円錐走査手段の測定データに基づいて前記測定対象の傾斜角、傾斜方向及び測定対象中心までの距離を算出する移動環境検出手段と、この移動環境検出手段が算出した前記測定対象の算出データに基づき、各測定対象の面形状を判断する面形状判断手段と、この面形状判断手段が水平面と判断した所定の測定対象の形状を認識する形状認識手段とを備えている。
(もっと読む)
形状計測装置
【課題】太陽電池ウェハの表面及び裏面の形状のみならず、太陽電池ウェハの厚みを高速に算出する。
【解決手段】光源121,131は太陽電池ウェハの表面及び裏面に光切断線CLを照射する。カメラ122,132は太陽電池ウェハが所定距離搬送される都度、測定試料500の表面及び裏面の光切断線画像を連続撮像する。計測データ算出部123,133は角光切断線画像から光切断線CLが現れている重心座標を表面計測データ及び裏面計測データとして算出する。高さデータ算出部143は、表面計測データ及び裏面計測データから太陽電池ウェハの表面及び裏面の高さデータを算出する。厚みデータ算出部146は、太陽電池ウェハの表面及び裏面の高さデータから太陽電池ウェハの厚みデータを求める。
(もっと読む)
内視鏡装置および画像取得方法
【課題】取得された複数の画像間の位置ずれを抑えることができる内視鏡装置を提供すること。
【解決手段】第一光源からの照明光の出射が開始されてから照明光の光量が安定するまでの時間waと、第二光源からの投影光の出射が開始されてから投影光の光量が安定するまでの時間wbとに基づいて、照明部と縞投影部とのうち光量が安定するまでの時間が長い方を先に動作させて被検物の第一の画像を撮像部に取得させ、照明部と縞投影部とのうち光量が安定するまでの時間が短い方を第一の画像の取得後に動作させて被検物の第二の画像を撮像部に取得させることを特徴とする。
(もっと読む)
内視鏡装置および計測方法
【課題】計測に適した条件であるかを短時間で判定できる内視鏡装置および計測方法を提供する。
【解決手段】本発明の内視鏡装置1は、第一光源41からの照明光の出射状態を所定の周期で変化させ、第一光源41から照明光が出射されている状態では第二光源51からの投影光の出射を停止させ、第一光源41からの照明光の出射が停止されている状態では第二光源51から投影光を出射させ、照明光により被検物が照明された明視野画像を第一光源41から照明光が出射されている状態で撮像部30に取得させ、被検物に縞パターンが投影されたパターン投影画像を投影光が出射されている状態で撮像部30に取得させ、撮像部30が取得したパターン投影画像を用いて被検物の三次元形状を計測し、パターン画像を用いた計測によって得られた情報を明視野画像とともにモニター28に表示させるメイン制御部22を備える。
(もっと読む)
形状測定装置およびこれに用いる光学フィルタ
【課題】装置構造を大型化することなく、光切断法によって至近距離から大型な被測定物の形状を精度よく測定できること。
【解決手段】本発明の一態様にかかる形状測定装置1は、被測定物15にスリット光L1を照射し、被測定物15から反射したスリット光L1をフィルタ3を介して撮像するとともにスリット光L1以外を遮光して、被測定物15の形状を測定する。フィルタ3の中心透過波長は、レンズ4の光軸C近傍においてスリット光L1の主ピーク波長と同等であり、スリット光L1の入射面に沿って光軸Cからフィルタ3の縁側に向けて大きくなる。
(もっと読む)
測定装置
【課題】被測定面の形状を高精度に測定することができる技術を提供する。
【解決手段】被測定面の形状を測定する測定装置であって、前記被測定面に接触する接触部材を含むプローブを保持するプローブハウジングと、前記被測定面に対する位置及び姿勢が固定され、前記被測定面の形状を測定するための基準となる基準ミラーと、前記基準ミラーと前記プローブとの間の第1距離を測定する第1距離測定部と、前記プローブハウジングと前記プローブとの間の第2距離を測定する第2距離測定部と、前記第2距離測定部で測定される前記第2距離が一定距離となるように前記プローブハウジングを駆動させながら前記第1距離測定部で測定される前記第1距離から前記接触部材の位置を特定し、当該接触部材の位置に基づいて前記被測定面の形状を算出する処理部と、を有する。
(もっと読む)
情報取得装置、投射装置および物体検出装置
【課題】検出対象物が近距離にある場合においても、大きな目標物の距離情報を取得できる情報取得装置、投射装置および物体検出装置を提供する。
【解決手段】投射光学系11は、レーザ光源111と、コリメータレンズ112と、レーザ光を分離させるハーフミラー113と、分離されたレーザ光をドットパターン光Dp1に変換して目標領域に投射するDOE114と、分離されたレーザ光をドットパターン光Dp2に変換して目標領域に投射するDOE115と、を備える。複数のDOE114、115を用いることにより、広い角度範囲で、目標領域にドットパターンを照射できる。これにより、情報取得装置は、検出対象物が近距離にあるような場合においても、検出対象物の距離情報を適正に取得することができる。
(もっと読む)
溶削済み鋼材の表面検査方法および表面検査装置
【課題】表面を溶削された鋼材の表面に残留する湯だれや未溶削部などの欠陥を精度良く確実に検出できる溶削済み鋼材の表面検査方法、およびこれに用いる検査装置を提供する。
【解決手段】1200℃以上に加熱され且つ表面f1〜f4,c1〜c4を溶削された鋼材Mの該表面を撮像する第1カメラ10、および、該カメラ10により得られた画像の輝度信号bsを温度に換算し、健常部位との温度差により湯だれ部mdや未溶削部umの疑似欠陥部分の有無を判別する信号処理部11を含む疑似欠陥検出部12と、上記撮像がされた同じ鋼材Mの表面f1〜f4,c1〜c4にレーザL1を照射するレーザ照射装置2、照射された該レーザL1が拡散反射された鋼材Mの表面f1〜f4,c1〜c4を撮像する第2カメラ7、および、該カメラ7により得られた画像を基に、鋼材Mの表面を連続した断面形状により3次元的に示す画像処理部8を含む3次元計測部9と、を備えている、溶削済み鋼材の表面検査装置1。
(もっと読む)
形状計測装置及び形状計測方法
【課題】二次元平面を構成する基準面を複数用いて物体の三次元形状を計測する形状計測装置及び形状計測方法を提供する。
【解決手段】本発明の形状計測装置100は、物体を照射する第1の光源20と、物体を照射する第2の光源30と、物体を撮像するための複数の画素を有するカメラ10と、第1の光源20及び第2の光源30の各々で得られる画素毎の輝度比を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルを予め保持するメモリ70と、物体を撮像して得られるそれぞれの画像信号の画素毎の輝度比を算出し、該輝度比の値から画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元座標を決定する制御ユニット50とを備える。
(もっと読む)
欠陥観察方法及びその装置
【課題】検査装置の検査情報とレビュー装置で取得した観察情報とを用い、欠陥の高さ、屈折率、材質の情報を取得して欠陥材質・屈折率分析や、微細なパターン形状の三次元解析を行う方法、並びにこれを搭載した欠陥観察装置を提供する。
【解決手段】試料上の欠陥を観察する方法において、光が照射された試料からの反射・散乱光を受光した検出器からの検出信号を処理して検出した検査結果の情報を用いて観察対象の欠陥が存在する位置を走査電子顕微鏡で撮像して画像を取得し、この取得した観察対象の欠陥の像を用いて欠陥のモデルを作成し、作成された欠陥のモデルに対して光を照射したときに欠陥モデルから発生する反射・散乱光を検出器で受光した場合のこの検出器の検出値を算出し、この算出した検出値と実際に試料からの反射・散乱光を受光した検出器の検出値とを比較して観察対象の欠陥の高さ又は材質又は屈折率に関する情報を求めるようにした。
(もっと読む)
形状認識方法、形状認識装置及び実装基板生産装置
【課題】物体が高速で移動し、物体の大きさによって必要とされる分解能が異なる場合でも、当該物体の形状認識を精度良く行うことができる形状認識方法を提供する。
【解決手段】物体の形状認識方法であって、基準光を物体上の投影領域に投影する基準光投影ステップ(S102)と、基準光が投影された投影領域のうちライン状の領域を撮像する基準光撮像ステップ(S104)と、輝度の傾斜方向に輝度が異なる輝度傾斜量を有する光である輝度傾斜光を投影領域に投影する傾斜光投影ステップ(S106)と、輝度傾斜光の投影方向と異なる撮像方向で、輝度傾斜光が投影された投影領域のうち、輝度傾斜光の輝度の傾斜方向と異なる方向に延びて配置されるライン状の領域を撮像する傾斜光撮像ステップ(S108)と、基準光撮像ステップ(S104)と傾斜光撮像ステップ(S108)での撮像結果を用いて物体の形状を認識する形状認識ステップ(S110)とを含む。
(もっと読む)
基板検査装置、基板検査方法及び該基板検査装置の調整方法
【課題】貼り合わせた2つの基板層のいずれかに検査光の透過しない部分があっても、貼り合わせ界面に発生し得る微小空洞を検査することのできる基板検査装置を提供することである。
【解決手段】基板100の表面に対して斜めに入射するように検査光を帯状に照射する光源ユニット30と、前記検査光により前記基板の表面に形成される帯状照明領域を挟んで光源ユニット30と逆側の所定位置に配置されるラインセンサカメラ20とを有し、照明ユニット30及びラインセンサカメラ20と基板100とが相対移動している際にラインセンサカメラ20から出力される映像信号に基づいて基板画像情報を生成し、基板画像情報に基づいて基板100の第1基板層101と第2基板層102との界面に生じ得る微小空洞についての検査結果情報を生成する構成となる。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】計測対象面への入射方向を挟んで対称に配置され受光面の計測対象面に対する傾斜角度が各対毎に相異なる2対の位置検出素子群25A,25Bを有し、走査光の計測対象面からの反射光の受光位置を検出する位置検出部25と、各位置検出素子が受光する光量が所定の範囲内にあるか否かを判定する受光量判定部34と、同一の位置検出素子群に属する位置検出素子による反射光の受光位置検出結果の差異の大きさが所定の基準値以下であるか否かを判定する受光位置検出結果判定部35とを備え、位置検出部25の受光位置検出結果に基づき受光量判定部34および受光位置検出結果判定部35の判定結果を加味して計測対象面の3次元認識画像を形成する構成とする。
(もっと読む)
計測方法
【課題】内視鏡装置を用いて三次元形状の計測を短時間で行う計測方法を提供すること。
【解決手段】被検物の三次元形状を内視鏡装置を用いて計測する計測方法であって、所定の縞パターンを内視鏡装置の1箇所から被検物に投影し、被検物において縞パターンが投影された部分を撮像して1枚のパターン投影画像を取得し、空間的位相シフト法またはフーリエ変換法を用いて縞パターンが投影された部分の三次元形状を1枚のパターン投影画像から計測することを特徴とする。
(もっと読む)
3次元計測装置
【課題】反射率の低い被計測物であっても輪郭を正確に計測することができる3次元計測装置を提供する。
【解決手段】
所定の波長領域を有する光を照射し被測定物で反射した反射光と基準反射光との干渉光の各波長の光強度を検出して分光干渉波形を求め、分光干渉波形と理論上の波形関数に基づいて波形解析を実行する制御手段を具備する3次元計測装置であって、被計測面が対物レンズの集光点位置と一致するように予め波形解析後の光強度のピーク位置と共焦点位置の対応をとっておき、制御手段はイメージセンサーからの検出信号に基づいて分光干渉波形を求め、分光干渉波形と理論上の波形関数に基づいて波形解析を実行し、対物レンズの集光点位置に対応する光強度を位置付け手段によって特定されたX、Y座標におけるZ座標の光強度としてメモリに保存し、該メモリに保存されたX、Y、Z座標に基づいて3次元画像を形成する。
(もっと読む)
ビードスティフナーの検査方法及び検査装置
【課題】ビードスティフナーの接合部分の検査において、基準形状と比較することなくビードスティフナーの形状を正確に測定して良否判定の精度を向上させるビードスティフナーの検査方法及び検査装置を提供する。
【解決手段】環状のビードコアと、帯状に成形され、延長方向の端部と端部とを互いに接合させてビードコアの外周に巻きつけられたスティフナーとを有するビードスティフナーの良否を判定する検査方法であって、ビードスティフナーの断面形状の形状データを取得する工程と、形状データからビードコアの頂点を検出する工程と、頂点から指定された領域内にスティフナーの端部の有無を検出する工程とを含み、スティフナーの端部の有無に基づいてビードコアとスティフナーとの接合の良否を判定する。
(もっと読む)
形状測定装置
【課題】測定範囲および測定精度を調整・変更可能なプローブを備えた形状測定装置を提供する。
【解決手段】ワークに直線状の光を照射する光照射部と、光照射部から照射された光のワークからの反射光を撮像する撮像素子32と、ワークからの反射光を撮像素子32の撮像面に結像させる結像レンズ31と、を備え、光照射部の光照射面と、結像レンズ31の主点を含む主平面と、撮像素子32の撮像面とが、シャインプルーフの条件を満たした形状測定装置であって、撮像素子32の撮像面を複数の領域(S1〜S3)に分割し、測定精度及び/又は測定範囲の大きさに応じて、複数の領域から測定に利用する領域を画像取得領域として選択する制御部10を備える。
(もっと読む)
121 - 140 / 2,403
[ Back to top ]