
Fターム[2F065AA53]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 輪郭 (4,339) | 3次元的 (2,562)
Fターム[2F065AA53]の下位に属するFターム
面上パターン (159)
Fターム[2F065AA53]に分類される特許
41 - 60 / 2,403
3次元計測システム及び3次元計測方法
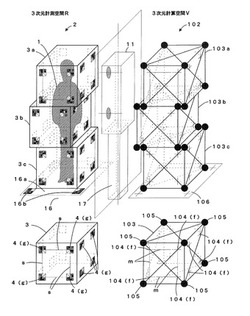
【課題】外部標定の容易なステレオ撮影による3次元計測システム及び3次元計測方法を提供する。
【解決手段】3次元計測システムは、測定対象物1を複数方向から撮影してステレオ画像20を得るステレオ撮影部11と;測定対象物の全体をカバーする基準体2の一部を構成する、複数の基準マーク4を有するサブ基準体3と;ステレオ撮影部で撮影して得たステレオ画像に基づくサブ基準体が有する複数の基準マークの3次元座標値の撮影測定値fと予め基準計測された基準測定値gとを含む、基準体の3次元数値解析モデルである基準体モデル102を3次元計算空間V中に一体として画成する基準体情報画成部12と;基準体モデルを用いてステレオ撮影部の外部標定要素を算出する標定要素算出部13と;外部標定要素により定位されたステレオ撮影部により撮影される測定対象物のステレオ画像から測定対象物の3次元計測をおこなう3次元計測部14とを備える。
(もっと読む)
対象物の三次元座標を決定する方法および装置

【課題】対象物の三次元座標決定のための、改善された方法および装置を提供する。
【解決手段】対象物の三次元座標を決めるための方法において、プロジェクタ(3)によりパターン(6)が前記対象物(1)上に投影され、前記対象物(1)により反射された光がカメラ(4)により記録され、前記カメラ(4)によって記録された画像が測定される。前記対象物(1)の上および/または傍側にある基準点マーク(8)が、リファレンスカメラ(5)によって記録される。前記リファレンスカメラ(5)の視野(9)は、カメラ(4)の視野よりも広い。この方法を改善するために、前記リファレンスカメラ(5)は、前記カメラ(4)と、または前記プロジェクタ(3)および前記カメラ(4)を備える三次元センサ(2)と接続されている。
(もっと読む)
回転式レーザー測定装置
【課題】コンクリート壁等測定対象面の状態(凹凸量)を装置により自動的に、かつ精度良く測定できるようにする。
【解決手段】回転式レーザー測定装置は、レーザー光によって距離を測定する距離センサと、該距離センサを軸方向に駆動する第1の駆動手段と、同距離センサを軸周り方向に駆動する第2の駆動手段と、これら第1,第2の駆動手段を駆動制御する駆動制御手段とを備え、上記距離センサを測定対象面の長手方向と直交する面に沿って回転可能に支持するとともに、上記測定対象面の長手方向に沿って所定ピッチ毎に移動可能とし、該所定ピッチ毎に上記距離センサを移動させ、かつ所定の角度回転させながら、測定対象面の状態を自動的に測定して行くようにした。このような構成によると、自動的かつ容易に、しかも正確に凹凸その他の表面状態を測定して行くことができるようになる。
(もっと読む)
3次元形状データ処理方法、3次元形状データ処理装置
【課題】3次元形状に対応するデータファイルのサイズを小さく、転送や取り扱いを容易とする。
【解決手段】レーザ光200の走査によって構成される面(走査面)と3次元形状をもつ対象物300との交線上に、各測定点は離散的に存在する。この3次元形状データ処理方法においては、データとして、3次元空間座標の点群データの代わりに、各走査面上における各測定点の平均位置Gnの空間的位置、走査面における座標軸Un、Vn軸の方向、各測定点Pn,i(1≦i≦k)についての、走査面での2次元座標(un,i、vn,i)を記録する。ただし、この2次元座標を記録する代わりに、後述する符号化された値を記録することもできる。
(もっと読む)
露光装置の調整方法、形状測定方法および形状測定装置
【課題】高精度に調整可能な露光装置の調整方法を提供することにある。
【解決手段】本発明の露光装置の調整方法は、鏡面部に光散乱部位を有する鏡面部材を有する露光装置の上記鏡面部に対し、レーザー光を照射する工程と、上記鏡面部の上記光散乱部位からの上記レーザー光の散乱光に基づき、上記光散乱部位までの距離を演算する工程と、上記演算工程に基づき上記鏡面部の形状を判定する工程と、上記判定結果に基づき、上記鏡面部の形状を調整する工程と、を有する。かかる方法によれば、鏡面部であっても光散乱により鏡面部の形状認識が可能となり、これに基づき、鏡面部の表面形状を調整することで、露光光の平行度の補正を効果的に行うことができる。
(もっと読む)
空隙量測定装置及び空隙量測定方法
【課題】着用物の種別に関わらず身体との間の空隙量を正確に測定することのできる空隙量測定装置及び空隙量測定方法を提供すること。
【解決手段】空隙量測定装置1は、人体模型20を載置する台座部12及び測定対象物に対してレーザー光を投光することで当該測定対象物までの距離を測定するセンサ部11を備える距離測定装置10と、センサ部11のレーザー光を透過する部材で構成され、上部が開口するとともにその内部が空洞状に形成された人体模型20と、距離測定装置10が測定した距離から着用物と人体模型との間の空隙量を算出する演算装置30と、を備える。このとき、センサ部11は、人体模型20の内部から当該人体模型20に着用された着用物の着用面に対してレーザー光を投光することで着用面までの距離を測定し、演算装置30は、着用物の着用面までの距離から空隙量を算出する。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
柄計測装置及び柄計測方法
【課題】ランダム柄を正確に計測しやすい柄計測装置を提供する。
【解決手段】凹凸型を用いてプレス成型された基材30の凹凸柄を計測する柄計測装置に関する。前記凹凸型の三次元の加工データを記憶する加工データ記憶手段11。前記加工データから選択された任意の特徴部sのデータを記憶する特徴部データ記憶手段12。前記基材に形成された前記凹凸柄を全面計測して得られる三次元データを記憶する凹凸柄データ記憶手段13。前記特徴部データと前記凹凸柄データとを比較することによって、前記特徴部により前記基材に形成される特徴柄が基材30の一端からどの位置に現れるかを検出すると共に、検出された前記特徴柄の位置を基準にして前記加工データと前記凹凸柄データとを比較することによって、前記加工データと前記凹凸柄データとのズレを算出する算出手段14とを備える。
(もっと読む)
部品実装装置、および、三次元形状測定装置
【課題】影の影響を除去し正確に位相シフト法による三次元データを高速に取得する。
【解決手段】直交する第一方向と第二方向とに撮像画素が行列状に並ぶエリアイメージセンサ111を有するカメラ101と、カメラ101と測定対象物200とを第一方向に相対的かつ連続的に移動させる移動手段102と、第一アングルで第一周期光を照射する第一照射手段131と、第二アングルで第二周期光を照射する第二照射手段132と、第一照射時間と第二照射時間とが重ならないように制御する照射制御手段104と、エリアイメージセンサ111の複数の第一ライン171を用い、第一照射手段131が照射する際の対象部分の像を取得し、複数の第二ライン172を用い、第二照射手段132が照射する際の像を取得する像取得手段105とを備える。
(もっと読む)
基板検査装置及び検査方法
【課題】基板検査装置及び検査方法を提供すること。
【解決手段】検査方法は、測定対象物を撮影して測定対象物のピクセル別にイメージデータを取得し、測定対象物のピクセル別に高さデータを取得し、測定対象物のピクセル別にビジビリティデータを取得し、取得されたイメージデータと、ピクセル別の高さデータ、及びビジビリティデータのうちの少なくとも1つとを乗算して結果値を算出し、算出された結果値を利用してターミナル領域を設定すること、を含む。よって、より正確にターミナル領域を判別することができる。
(もっと読む)
溶接ビード欠陥検出装置及び溶接ビード欠陥検出方法
【課題】溶接ビード欠陥の検出精度を向上できる溶接ビード欠陥検出装置及び溶接ビード欠陥検出方法を提供する。
【解決手段】溶接ビードの欠陥を検出する溶接ビード欠陥検出装置10であって、溶接モデルBLと平滑モデルSLとの比較、あるいは、平滑モデルSLと折線モデルVLとの比較、に基づいて、溶接モデルBLを、異常点と正常点とに分別する点群データ分別手段200と、異常点と、隣接する正常点間の距離と、に基づいて、溶接モデルBLを、欠落領域GGと非欠落領域GNとに分別する欠落領域分別手段300と、欠落領域GGまたは非欠落領域GNを順次併合して併合欠落領域GGGとする欠落領域併合手段400と、を具備する。
(もっと読む)
複数波長による表面形状測定方法およびこれを用いた装置
【課題】 光干渉法を用いて、1波長の単色光を測定対象面に照射し、測定対象面までの距離を変更して、少なくとも3枚以上の画像を撮像して、各画素の輝度値から位相計算をおこない、隣接画素の位相値を用いて三次元形状を測定する位相シフト法が用いられて来たが、隣接画素間の段差に波長による制約があった。
【解決手段】広帯域な波長特性を有する照射光から波長の異なる複数の単色光を抽出し、それらを混在させて、分岐手段を介して測定対象面と参照面に同時に照射し、測定対象面と参照面とから反射して同一光路を戻る反射光によって生じる干渉縞の画像を測定対象面と参照面とからの反射光路長の差を変化させて、取得した前記複数枚の画像を単色光ごとに分解し、単色光ごとに求めた各画素の位相から、複数個の表面高さの候補群を求め、各候補群から共通する高さを実高さとして求める。
(もっと読む)
三次元分光的符号化撮像のための方法と装置
【課題】簡単な構成で、深度に関して解像度の良い、広い、三次元撮像方法の実現。
【解決手段】位相感知分光的符号化撮像を使用する、三次元表面測定値を得るための方法および装置が記述される。横方向および深度の両者についての情報は、単一モード光ファイバを介して送信され、本手法を小型プローブへの組み込むことが可能となる。
(もっと読む)
撮像装置、位置計測装置及び撮像方法、位置計測方法、並びに構造物の製造方法
【課題】CCDやCMOSセンサなどの撮像素子を用いた薄型の撮像装置が多く用いられており、位置計測対象を複数の撮像装置で撮像して所定の画像処理を施すことにより、位置計測対象の位置を計測している。この時、視野を広くしても、分解能の低下を抑制できる撮像装置、位置計測装置及び撮像方法並びに位置計測方法を提供する。
【解決手段】視野V1〜V3の像を撮像する撮像素子2を備える。複数の視野の像を重ねて撮像素子に撮像可能とする像重ね部3を備える。前記像重ね部は、入射した光の少なくとも一部を前記撮像素子に入射させるビームスプリッターを有する。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】 エンコーダで位置を計測しつつ、移動体を所望の方向へ精度良く駆動する。
【解決手段】 駆動装置により、ウエハステージWSTのY軸方向の位置情報を計測するエンコーダ62Aの計測値とそのエンコーダによって計測されるスケール39Y1の平面度に関する情報とに基づいて、ウエハステージWSTがY軸方向に駆動される。この場合、駆動装置は、そのエンコーダの計測値に含まれるスケールの平面度に起因する計測誤差をスケールの平面度に関する情報に基づいて補正した補正後の計測値に基づいて、ウエハステージを所定方向に駆動することが可能である。従って、スケールの凹凸に影響を受けることなく、エンコーダを用いてウエハステージを精度良く所定方向に駆動することが可能となる。
(もっと読む)
形状測定装置、形状測定方法、構造物製造システム及び構造物の製造方法
【課題】測定対象物の形状を高精度で測定できる形状測定装置、形状測定方法、及び構造物の製造方法を提供すること。
【解決手段】被測定物に所定の光量分布を有するパターン光を形成する照明部と、光が被測定物に照射される照射方向と異なる方向から被測定物に照射されたパターン光の像を撮像する撮像素子を含む撮像部と、像の撮像信号を評価する評価部と、評価部の評価結果に基づき撮像部の撮像結果に対して所定の処理を行うことで被測定物の位置情報を算出する処理部と、を備える形状測定装置に関する。
(もっと読む)
足背高測定法及びその測定法を使用した足型測定器
【課題】足型測定器において、撮像手段により足の側方を撮影する場合、撮像手段と足の距離を正確に測定できないことから足背部の高さの正確な測定ができないという不都合を解決し、足背高の正確な測定を含む足型測定器を提供すること。
【解決手段】足型測定器の撮像手段で取得した足裏画像において、第2足指の先端と踵の最後端を結ぶ線上の各点と撮像手段の光学的中心との距離を測ることにより、撮像手段と足との間の距離を特定できる。撮像装置と種々の距離での既知高の物体の画素単位での測定値と物体の実寸法との関係から変換式を事前に求めておくことにより、足の側方画像から求めた画素単位での足背高を実寸法に変換することができる。この手法により、足背高の測定を含む足型測定器を提供する。
(もっと読む)
ロボットシステム
【課題】スリット光の予測投影領域を最適化することによってロボットによるワークの取出作業の速度および精度を向上させることができるロボットシステムを提供すること。
【解決手段】実施形態の一態様に係るロボットシステムは、投影部と撮像部と予測投影領域決定部と投影位置検出部とロボットとを備える。投影部は、ワークが載置される載置領域へスリット光を投影して所定の移動方向へ移動させる。撮像部は、ワーク上を移動するスリット光を順次複数回撮像する。予測投影領域決定部は、撮像された画像を移動方向と交差する交差方向へ横断し、画像における交差方向の中央に近いほど移動方向と平行な方向の長さが長くなるように、画像におけるスリット光の予測投影領域を決定する。投影位置検出部は、予測投影領域の中からスリット光の投影位置を検出する。ロボットは、検出された投影位置に基づいてワークを把持する。
(もっと読む)
計測装置
【課題】高速かつ高精度に被検面の形状を計測することが可能な計測装置を提供すること
【解決手段】計測装置は、光コム光源101から射出された光束を、被検光束と参照光束に分割するPBS15と、前記参照光束と前記被検光束の光路長差を変化させる遅延素子9と、前記被検光束と前記参照光束が干渉して形成する干渉縞を撮像する撮像素子24と、遅延素子が光路長差を変化させて撮像された干渉縞の信号に基づいて被検面23の位置を算出する解析器25と、を有する。
(もっと読む)
形状測定方法及び形状測定装置
【課題】被検物の表面形状を短時間で測定可能な形状測定方法を提供する。
【解決手段】形状測定方法は、n=1〜N(Nは3以上の整数)とし、参照光の光軸上において異なるN個の位置を第1位置〜第N位置と称するとき、参照面を第n位置に固定し、物体光を被検物の光軸と所定の角度をなす方向から照射して、被検物をその光軸を中心に回転させながら、干渉縞を、被検物上で重複領域を有して隣接し合う複数の領域ごとに取得される複数の第n干渉縞として取得する第n工程を備え、第1工程から第N工程を行う干渉縞画像取得工程S11の後に、複数の領域のそれぞれに対応する干渉縞を用いて位相解析を行い、部分表面形状データを取得する位相解析工程S12と、部分表面形状データを重複領域でつなぎ合わせて被検物の輪帯状領域又は全体の表面形状データを取得する統合工程S13と、を備える。
(もっと読む)
41 - 60 / 2,403
[ Back to top ]