
Fターム[2F065AA53]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 輪郭 (4,339) | 3次元的 (2,562)
Fターム[2F065AA53]の下位に属するFターム
面上パターン (159)
Fターム[2F065AA53]に分類される特許
81 - 100 / 2,403
接合継ぎ目を監視する光学測定装置、ならびに同測定装置を備える接合ヘッド及びレーザ溶接ヘッド
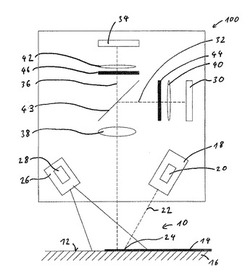
【課題】ワークピース内の接合領域を監視する光学測定装置を提供する。
【解決手段】光学測定装置100は、接合対象であるワークピース16の方向に光扇22を投射して、前記接合対象であるワークピースの接合領域10内に、その接合領域内の接合継ぎ目14と交差する三角測量光ライン24を生成するのに適した第1光源20を備える少なくとも一つの光切断装置18と、前記接合対象であるワークピースの接合領域を均一に照光する第2光源28を備える照光装置26と、接合継ぎ目上に投影された三角測量光ラインの空間分解画像を生成する、第1測定ビーム経路32を有する第1光センサ30と、接合継ぎ目の空間分解画像を生成する、第2測定ビーム経路36を有する第2光センサ34とを含み、第2測定ビーム経路は、第1測定ビーム経路内に同軸結合され、第1光センサの読み取り速度は1kHzを上回り、第2光センサの読み取り速度は500Hz未満である。
(もっと読む)
高さ計測装置及び方法

【課題】被計測物が様々な屈折率で、かつ様々な厚さの透明媒質の下に配置されていても、その被計測物の高さを容易に計測する。
【解決手段】高さ計測装置1は、照明光から分岐された第1照明光を被計測物6に導く対物レンズ24と、照明光から分岐された第2照明光を参照ミラー28に導く対物レンズ26と、第2照明光の光路長を調整する移動部36と、被計測物6及び参照ミラー28で反射される2つの照明光の干渉像を撮像する高速度カメラ12と、対物レンズ24と被計測物6とを光軸方向に相対移動するピエゾ駆動装置18と、を備える。
(もっと読む)
3次元計測装置と3次元計測方法
【課題】ライン光が撮影手段に向けて正反射されることがなく、撮影が困難になることを防止する。
【解決手段】被検査体1にライン光4を照射して両者を相対移動させながら撮影手段26で撮影することにより、光切断法によって被検査体1を3次元計測することができる。上記被検査体1は、ワークに予め定められた配列方向Aに配列して設けられた複数の凹凸状部分3を有しており、この凹凸状部分3は、上記配列方向Aと直交する方向の直線部分3aを有している。上記ライン光4の相対移動方向Bと、この相対移動方向に対するライン光の角度θとは、該ライン光4が上記直線部分3aに対して斜めに交差して照射されながら相対移動されるように予め設定されている。
(もっと読む)
外観検査方法及びその装置
【課題】複雑形状をした物体の外観検査において、目視では検出困難な形状の不良を定量的に評価し、検出する物体の外観検査方法及びその装置を提供することにある。
【解決手段】
物体の外観を検査する方法を、検査対象物体を載置して少なくとも一方向に連続的に移動させながら検査対象物体を撮像して検査対象物体の表面のテクスチャ情報を含む検査対象物体の画像を取得しながら検査対象物体の表面凹凸情報を取得し、この取得した検査対象物体の表面凹凸情報から検査対象物体の立体形状を復元し、取得した画像と復元した検査対象物体の立体形状とから表面テクスチャを持った物体の外観情報を得、この得られた外観情報から複数の特徴を抽出し、この抽出した複数の特徴のうち少なくとも1つの特徴を予め設定した参照データの前記少なくとも1つの特徴に対応する特徴と比較して検査対象となる物体の外観を評価するようにした。
(もっと読む)
画像処理方法および装置
【課題】高密度かつ高速に運動する物体の形状計測を可能にするための画像処理方法および装置を提供する。
【解決手段】投影装置により観測対象上に投影される、周期パターンからなる投影パターンを撮影装置により撮影し、投影パターンを含む入力画像から形状復元を行う画像処理方法において、投影装置より投影された投影パターンを撮影装置により撮影された入力画像から検出するステップと、検出された投影パターンの相対位相を検出するステップと、検出された投影パターンの絶対位相を、基準位置からの相対的な位相と、基準位置の絶対的な位相との和により表すと、複数の投影パターンの絶対位相により計算した奥行きが一致するという第1条件が検出された投影パターンの各画素について成立することに基づき基準位置の絶対的な位相を計算するステップとを備える。
(もっと読む)
基板検査装置および基板検査方法
【課題】基板に形成された凹部の形状を、非破壊、非接触にて検査する技術を提供する。
【解決手段】基板検査装置100は貫通ビアWH(凹部)が形成されている基板Wを検査する。基板検査装置100は、ポンプ光の照射に応じて、基板Wに向けてテラヘルツ波を照射する照射部12と、プローブ光の照射に応じて、基板Wを透過したテラヘルツ波の電場強度を検出する検出部13と、テラヘルツ波が基板Wの貫通ビア形成領域を透過する透過時間と平坦領域を透過する透過時間との時間差を取得する時間差取得部24と、該時間差に基づいて貫通ビアWHの深度を算出するビア深度算出部26とを備える。また、基板検査装置100は、ビア深度算出部26により算出した貫通ビアWHの算出深度と、干渉法を利用する深度測定装置16によって測定した貫通ビアWHの実測深度とに基づいて、貫通ビアWHの形状を示す形状指標値を取得する形状指標取得部27を備える。
(もっと読む)
3次元形状測定方法及び装置並びに3次元形状測定用顕微鏡装置
【課題】段差部を有する鏡面反射性物体の形状を高精度に測定することが可能な3次元形
状測定方法及び装置並びに3次元形状測定用顕微鏡装置を提供する。
【解決手段】デフレクトメトリの手法を用いて被検面4の局所スロープ情報及び形状情報
を求めた後、投影光学系2による面光源1の共役位置3が記被検面4上に位置するように
設定するとともに、開口絞り22の絞り半径を小さくして、面光源像を被検面4に投影す
る。観察光学系5により観察される面光源画像における歪情報と、先に求めた局所スロー
プ情報及び形状情報に基づき、被検面が有する段差部の段差量情報を求め、その段差量情
報に基づき形状情報を補正する。
(もっと読む)
形状測定装置および形状測定方法
【課題】検出用走査を行うことなく、ワンショット撮影により、高さ方向のダイナミックレンジの大きい、被検面の1ライン上の微細な凹凸形状情報を容易に取得し得る、形状測定装置および形状測定方法を提供する。
【解決手段】 空間的にインコヒーレントで広帯域スペクトルを有する光を射出する面状の光源10からの照明光を、対物レンズ13A、Bを介して参照面14および被検面20に照射し、得られた参照光と測定光を干渉させ、その干渉光をスリット16Aにより線状に整形し、分光器16により分光し、2次元撮像手段17により得られたスペクトル干渉情報に基づき被検面20の形状を解析する。光源10、被検面20、スリット16A、および光源10、参照面14、スリット16Aは各々互いに共役である。被検面20を介する系路の光路長と、参照面14を介する経路の光路長との間にオフセットが設けられる。
(もっと読む)
3次元形状の取得装置、処理方法およびプログラム
【課題】動きのある対象の形状を高密度かつ高フレームレートに計測可能な画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】画像処理装置10と、カメラ28、32と、プロジェクタ24と、プロジェクタ26とで、3次元空間中に存在する物体30の2次元画像を撮影し、撮影された2次元画像から物体の3次元形状を復元している。プロジェクタ24は物体30に対して横方向のパターンを照射し、プロジェクタ26は物体30に対して縦方向のパターンを照射している。そして、これらのパターンが物体30で反射したパターン光をカメラ28、32で撮影することで2次元画像を取得し、この2次元画像から画像処理装置10により3次元画像を復元している。さらに、カメラ28と32の整合性を調べることで3次元形状の精度向上が実現される。
(もっと読む)
レーザ干渉測定装置の横座標校正治具および横座標校正方法
【課題】収束光学系を有するレーザ干渉測定装置における測定面上の位置の校正が簡便かつ高精度に行えるレーザ干渉測定装置の横座標校正治具および横座標校正方法を提供すること。
【解決手段】横座標校正治具10は、マーカを有する画像を投影する画像投影手段19と、画像投影手段19を第1回動軸線A1まわりに回動自在に支持しかつ第1回動軸線が所定の回動中心Cを通る第1支持機構11と、第1支持機構を第2回動軸線A2まわりに回動自在に支持しかつ第2回動軸線が回動中心Cで第1回動軸線A1と交叉する第2支持機構12と、を有する。
(もっと読む)
移動体及び移動面検出システム
【課題】照度の低い環境において、コントラストが低い移動面上を移動する移動体の位置及び姿勢、並びにその移動面の形状を検出する。
【解決手段】移動体及び移動面検出システム1は、移動体3と、移動体3上に配置された発光部4と、移動体3を俯瞰する位置に設けられたステレオカメラ5及び測距センサ6と、ステレオカメラ5及び測距センサ6の出力を処理する処理部7と、処理部7の出力を表示する表示部8とを備える。ステレオカメラ5は、発光部4のステレオ画像を撮像する。測距センサ6は、移動面に光を出射し、移動面で反射されて戻ってくる光の飛行時間に基づいて移動面を測距する。処理部7は、ステレオカメラ5が撮像したステレオ画像に基づいて移動体3の位置及び姿勢を検出するとともに、測距センサ6の出力に基づいて移動面の形状を検出し、移動体3の位置及び姿勢と、移動面の形状とを表示部8に表示する。
(もっと読む)
走査型白色干渉計による試料の表面形状の測定方法
【課題】試料の表面形状の測定精度を大幅に向上させることのできる、走査型白色干渉計による試料の表面形状の測定方法を提供する。
【解決手段】対物レンズの下にビームスプリッター及びミラーを配し、試料表面を含めて、マイケルソン型などの干渉計を構成し、試料までの距離又はミラーまでの距離をピエゾアクチュエーターで走査し、それによりできる干渉波形をCCDカメラで撮影して動画ファイルデータとして記録し、データ収集間隔をナイキスト間隔(干渉波形の周期の1/2)よりも広く取って試料の表面形状を測定する、走査型白色干渉計による試料の表面形状の測定方法において、得られた収集波形についてヒルベルト変換を行い、包絡線と位相を得、こうして得られた位相が0になる走査位置と試料の表面高さとの関係を用いて位相が0になる走査位置から試料表面の高さを算出する。
(もっと読む)
撮像装置、撮像装置の制御方法、三次元計測装置、およびプログラム
【課題】サンプリングピッチを細かくすることなく、少ないサンプリング数でより高精度に交点を算出する。
【解決手段】明部および暗部を有する第1のパターンまたは第2のパターンを投影パターンとして対象物へ投影する投影部と、投影パターンが投影された対象物を撮像素子に輝度分布として結像させる撮像部と、を備え、輝度分布は明部に対応する第1の輝度値と暗部に対応する第2の輝度値とを有し、第1のパターンおよび第2のパターンは明部の位置または暗部の位置が重複する重複部を有し、第1のパターンに対応する第1の輝度分布および第2のパターンに対応する第2の輝度分布は重複部で同輝度値となる交点を有し、交点の輝度値は第1の輝度値および第2の輝度値の平均値と所定値だけ異なる。
(もっと読む)
マニピュレータ装置
【課題】操作入力手段に直接触れずに、非接触に操縦することのできるマニピュレータ装置を提供する。
【解決手段】アーム40aを有するマニピュレータ40(スレーブ)と、このマニピュレータ40の動作(動き)を制御する制御手段(スレーブコントローラ30)と、光学式の入力インターフェースを備える操作入力手段(マスタコントローラ20)とを備えるマニピュレータ装置において、上記操作入力手段の入力インターフェースとして、枠状のフレームの内側に物体検知用の光の格子が形成される光学式センサを、その厚さ方向に複数枚積み重ねて形成した3次元センサ100を用いる。
(もっと読む)
走査型白色干渉計による試料の表面形状の測定方法
【課題】試料の表面形状を測定する際に、干渉波形の包絡線と位相との両方に基き試料の表面形状を算出できるようにした走査型白色干渉計による試料の表面形状の測定方法を提供する。
【解決手段】撮影した動画ファイルデータに基づき、試料の表面上の位置に対応する各画素において、ヒルベルト変換を用いて干渉波形の包絡線と位相を算出し、包絡線がピークになる走査位置と、位相が0になる走査位置を算出し、両位置の差から、試料表面の反射光の位相変化による位置ずれの値を検出し、その値の大きさから、その画素の試料表面が他の画素の試料表面と同種であるか異種であるかを判定し、同種のもの同士で干渉波形の位相が0になる走査位置のずれの平均値を算出しておき、各画素で、位相が0になる位置から対応する試料の表面上の物質での位相が0になる走査位置のずれの平均値を引くことで、反射光の位相変化の影響が消されて試料の表面形状が測定される。
(もっと読む)
走査型白色干渉計のデータ処理方法
【課題】走査型白色干渉計を用いて試料の表面形状を測定する際に、少ないデータ数で精度よく試料の表面形状を測定できるようにするデータ処理方法を提供する。
【解決手段】走査型白色干渉計のデータ処理方法は、干渉計で得た動画ファイルデータを読み出し、それぞれの画素において時間軸方向のデータに基き、ヒルベルト変換を用いて、時間軸上での位置で、干渉計の光路差が0になる走査距離に対応した干渉波形の最大のピークの位置を求め、それを全画素で表わす。
(もっと読む)
三次元計測システム及び三次元計測方法
【課題】ロボットの座標系に依存しない、三次元計測システムを提供する。
【解決手段】計測対象の三次元形状を計測する三次元計測器20と、この三次元計測器20を移動させるロボット10と、ロボット10を駆動制御するロボット制御装置30と、を備えた三次元計測システム1であって、ロボットのアーム先端に固定され三次元計測器を支持したベースプレート60と、ベースプレートに固定された三次元計測器20の傾きを計測するロボット計測装置40と、ワーク計測箇所の座標及びワークの形状寸法を算出するデータ処理装置50と、を備えている。
(もっと読む)
測定装置
【課題】内径の異なる種々の穴形状を精度良く測定できる測定装置を提供すること。
【解決手段】被測定領域の少なくとも一部の面の法線方向とは異なる方向から前記被測定領域に照明光を照射することで被測定領域に帯状の照明領域を形成する照明系と、前記照明系による照射方向と前記帯状の照明領域における長手方向等を含む面からはずれた位置から照明領域の散乱光を受光する受光系と、受光系の受光結果に基づいて被検面の形状を算出する演算部と、を備える。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】カメラ、レーザの相対位置を高精度で設置する必要がなく、また、測定レンジを複数種類を単一の測定プログラムにより変更する。
【解決手段】レーザ線条光照射部12と、既知形状の基準模様群を表示面に表示した座標変換テーブル作成用印刷表示板16と、照射部位の光切断面及びレーザ照射平面上に設置される表示板16を撮影するカメラ11と、表示板16の基準模様群を撮影したカメラ上の座標データを抽出する基準座標抽出手段131とから基準模様群の座標データと基準座標抽出手段131で抽出されたカメラ上の座標データとの対応関係を示す座標変換テーブル133を作成する。形状測定時には、表示板16を外して同じ位置に被測定物を配置させ、レーザ線条光を照射して照射部位の光切断面を撮影した画像から、点群抽出手段134により光切断面の点群を抽出する。抽出した点群座標を近似処理手段135により座標変換テーブル上の値に近似する。
(もっと読む)
三次元画像取得装置および三次元画像取得方法
【課題】対物レンズの被計測体側に配設された光学素子によりスポット位置を光軸に垂直な面内方向に走査することができるとともにこの光学素子による光学系全体の結像性能の劣化を抑えることができる三次元画像取得装置および三次元画像取得方法を提供する。
【解決手段】三次元画像取得装置10は、共焦点光学系を用いた三次元画像取得装置であって、対物レンズ13の被計測体15側の光軸と交差するよう配設された平行平板形の部材を有し、光軸と垂直な面に対する平行平板形の部材の傾きを異ならせることで、傾きに応じて屈折作用により被計測体側共役点の位置を光軸方向に垂直な面内で変更するXY方向焦点位置変更部14を備え、平行平板形の部材の傾きは、対物レンズ13の被計測体側共役点に集光される光の直径が、エアリーディスク直径の半分となる所定の傾き以下である。
(もっと読む)
81 - 100 / 2,403
[ Back to top ]