
Fターム[2F065MM11]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 投光系による走査 (1,119)
Fターム[2F065MM11]の下位に属するFターム
Fターム[2F065MM11]に分類される特許
1 - 20 / 149
画像測定装置
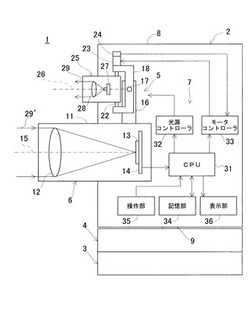
【課題】簡単な構造で容易に対象エリア、又は測定対象の画像が取得できると共に対象エリアの測定が行える画像測定装置を提供する。
【解決手段】投光光軸26と照明光29を射出する光源27とを有し、前記投光光軸を経て前記照明光を投射する投光光学系5と、受光光軸15と撮像素子13とを有し、測定対象からの再帰反射光29′を前記受光光軸を経て撮像素子で受光する受光光学系6と、前記撮像素子で撮像されたデータを処理する制御演算装置7とを具備し、前記投光光学系は前記投光光軸を測定対象に向け前記照明光を投射する投光ユニット25と、該投光ユニットを高低方向、水平方向に回転し、前記照明光の投射角を変更する投射角変更手段23,33と、前記受光光軸に対する前記投光光軸の方向角を検出する方向検出手段24とを有する。
(もっと読む)
コークス炉の炉壁診断方法およびコークス炉の炉壁補修方法

【課題】老朽化したコークス炉における炭化室の炉壁の変形状態(壁面の凹凸、窯幅の変化)を、炭化室内部に測定装置を入れることなく、炭化室外部から簡便に精度良く測定することができるコークス炉の炉壁診断方法およびコークス炉の炉壁補修方法を提供する。
【解決手段】炭化室10の外側にレーザー式3次元形状測定装置20を配置し、レーザー式3次元形状測定装置20によって、蓋12をとった状態の窯口11から斜めにレーザー21を照射して、炉壁(壁面)13の形状を点群として測定する工程を、炭化室10の左右の壁面13a、13bに対して独立して実施した後、左右を独立して測定した壁面の形状を、炭化室10周辺の基準物22を元に合成して、一つの形状データ(点群)にまとめて左右合成炉壁形状とし、その左右合成炉壁形状から左右の壁面間の距離(窯幅)を計算して、炉壁形状(壁面の凹凸、窯幅の変化)の診断を行う。
(もっと読む)
柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置
【課題】本願発明の課題は、柱状物体の空間情報を得るためには多くの労力と時間を要する、大量の柱状物体を漏れなく抽出することが難しい、あらかじめ柱状物体を認識しなければならない、といった問題を解決することであり、大量の計測データの中から、正確かつ短時間で、柱状物体を自動抽出する柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を提供することにある。
【解決手段】本願発明の柱状物体抽出方法は、計測点群から柱状物体を抽出する方法であり、計測点群からそれぞれ独立した領域ごとにセグメントデータを得るセグメンテーション工程と、細線化処理を行うことで立設物形状データを得る細線化工程と、主成分分析を行って固有値から算出される特徴量に基づいて形状分類を与える形状分類工程と、特徴量等に基づいて立設物の柱状判定を行う柱状物体判定工程を備える方法である。
(もっと読む)
データ解析装置、データ解析方法、及びプログラム
【課題】地物表面の三次元形状を表す点群データに基づいて地物の壁面を自動的に検出する。
【解決手段】部分空間設定手段20は解析の対象空間を垂直面で分割して、柱状の複数の部分空間を設定する。部分空間選択手段22は部分空間のうち予め設定した閾値以上の高低差を有する点群を含むものを注目部分空間として選択する。ブロック空間設定手段24は注目部分空間を水平面で分割して、縦に積み重なる複数のブロック空間を設定する。水平面内探索手段26はブロック空間ごとに、水平面内の線分のうち、水平面に射影された点群が予め設定した基準以上に近傍に集まるものを探索して水平面内における壁面の位置と定める。
(もっと読む)
計測装置、計測方法、及びプログラム
【課題】平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供する。
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
(もっと読む)
レーザ光振れ量検出装置、変位測定装置、光学素子成形用金型の製造方法及び光学素子
【課題】レーザ光の光軸に直交する2方向の光軸振れを高精度に測定する。
【解決手段】第1の偏光ビームスプリッタ4は、レーザ光源1から出射されたレーザ光2aを、第1の直線偏光成分2bと第2の直線偏光成分2cとに分割する。光学系3は、第1の直線偏光成分2bの振れ方向と第2の直線偏光成分2cの振れ方向とが互いに直交するように第1の直線偏光成分2b及び第2の直線偏光成分2cのうち少なくとも一方の直線偏光成分を光軸まわりに回転させて合成光とする。遮光部材8は、先端8aを合成光に突出させて合成光の一部を遮光する。第2の偏光ビームスプリッタ9は、遮光部材8で遮光されずに通過した通過光を、第1の直線偏光成分2bと第2の直線偏光成分2cとに分割する。各受光素子10a,10bは、偏光ビームスプリッタ9で分割されたそれぞれの直線偏光成分の光量を測定する。演算部12は、測定結果に基づきレーザ光2aの振れ量を求める。
(もっと読む)
物品径の測定方法
【課題】センサ等を物品内に挿入することなく当該物品の内径や外径を効率的に測定する。
【解決手段】回転テーブル1上に載置された物品2の内周面21と、物品2の外に配設され回転テーブル1の回転軸13からの距離が判明している校正面4aとに、物品2の外に配設した二次元レーザ変位計3のスキャン線を位置させて、内周面21と校正面4aとの変位差を二次元レーザ変位計3にて測定し、上記距離と変位差に基づいて内周面21の半径を算出する。二次元レーザ変位計3のレーザ射出点とスキャン線を含む面上に、回転テーブル1の回転軸13が位置するように変位計3が配置されており、回転テーブル1を回転させて、内周面21とこれと径方向対称位置にある他の内周面における各半径を算出して、これら半径の値を合計することで物品2の直径を算出する。
(もっと読む)
形状測定装置
【課題】従来の形状測定装置は、被測定物体の幅方向に変位計を複数台設置して凹凸を測定していたので、幅方向の分解能が粗いという問題があった。また、スポット光と光走査装置を用いて、被測定物体の幅方向にこの光スポットを走査し、撮像装置で走査されたスポット光を撮像する方法が提案されていたが、撮像装置の受光信号のレベルが低い、または、測定範囲内の受光レベル差が大きく、安定した測定ができないという問題があった。
【解決手段】被測定物体に垂直でかつ幅方向にスリット状の光を照射するスリット光光源と、スリット光源と反対側に配置される撮像装置と、被測定物体に垂直でかつ搬送方向にスリット状の光を照射するスリット光光源と、スリット光源と反対側に配置される撮像装置と、撮像素子上の結像座標を被測定物体の測定座標に変換する座標変換器と、顕在形状演算器を備えた。
(もっと読む)
検査装置のデータ分配方法及び検査装置
【課題】検査装置における伝送プロトコルは画像データの送信側と受信側が使用する伝送プロトコルに応じて最適化されている。このため、使用する伝送プロトコルが変更されると、データの分配を実行する部分の再開発が必要とされる。
【解決手段】画像データに付加情報を付して出力する撮像部と画像データを処理する画像処理部との間に画像分配部を配置する。さらに、画像分配部を、第1の伝送プロトコルにより撮像部から入力される画像データを所定のデータ形式に変換する画像入力部と、所定のデータ形式に変換されたデータの分配を制御する分配制御部と、所定のデータ形式のデータを第2の伝送プロトコルの画像データに変換して画像処理部に出力する画像出力部とで構成する。
(もっと読む)
レーザ計測用ターゲット治具及びレーザ計測システム
【課題】計測システム全体の小型化及び軽量化を図るとともに、配管の取付位置を正確に特定することができる、レーザ計測用ターゲット治具及びレーザ計測システムを提供する。
【解決手段】第一フランジ11に一端部2a及び中間部2bが固定される計測器用固定治具2と、第二フランジ12に固定されるレーザ計測用ターゲット治具3と、計測器用固定治具2の他端部2cに固定されるレーザ計測器4と、第一フランジ11及び第二フランジ12の位置を算出する演算手段5と、を備え、レーザ計測用ターゲット治具3は、第二フランジ12に配置される台座31と、レーザ光を反射可能な表面32aを有し台座31に表面の一部が突出するように固定された球体32と、台座31を第二フランジ12に固定する固定手段33と、を有する。
(もっと読む)
三次元点群位置データ処理装置、三次元点群位置データ処理方法、三次元点群位置データ処理システムおよびプログラム
【課題】三次元点群位置データの処理の途中経過を知ることができる技術を提供する。
【解決手段】三次元レーザースキャナが測定した三次元点群位置データ(S502)に基づき、解像度を段階的に変えた三次元モデルを作成する(S505)。この際、低解像度の三次元モデルの作成およびその表示(S506)、さらにその後に、ラベリングされたデータを引き継いで(S509)の高解像度の三次元モデルの作成およびその表示を行う。ここで、低解像度の三次元モデルの表示を行うことで、最終的な三次元モデルの完成の途中の段階をユーザが把握することができる。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 対物レンズ57が、ガラス管Gに照射されるレーザ光を集光させて、その反射光を回折格子35及びラインセンサ36で受光してガラス管Gの厚さを測定する。対物レンズ57をX軸線方向の焦点距離Fxと、Y軸線周りに回転するガルバノミラー52から対物レンズ57までの光学的距離aと、対物レンズ57からガラス管Gの表面までの光学的距離bとの関係が、(1/a)+(1/b)=1/Fxの関係になるようにする。レーザ光の光軸がガラス管Gの中心軸に垂直になるようにY軸線周り角度のサーボ制御を行っても、X軸線方向におけるレーザ光のガラス管Gへの照射位置を変化させないように1点に固定することができて、ガラス管GのZ軸線周りの傾きの度合によりサーボが不安定になることを抑制する。
(もっと読む)
展開図生成装置、展開図生成方法及び展開図表示方法
【課題】トンネルの壁面がどの程度の高さの凹凸を持つかを知ることが可能な技術を提供することを目的とする。
【解決手段】展開図生成装置は、記憶装置1と、変換装置2と、照合装置3と、変位形状生成装置4と、描画装置5とを備える。変換装置2は、壁面42の複数の計測点7を壁面42の展開図に配置する座標変換を行う。変位形状生成装置4は、座標変換された複数の計測点7の座標に基づいて、壁面42の展開平面17に、当該展開平面17に直交する方向の座標wの値を反映した凹凸形状が付与されてなる変位形状41を生成する。描画手段5は、変位形状41に、画像9のパターンを描画する。
(もっと読む)
対象物の認識システム、見守りシステム、監視システム
【課題】エネルギ照射装置と2次元撮像装置を用いることで、種々の条件下で頑健に動作する対象物認識システムおよび見守りシステム、監視システムを提供する。
【解決手段】観測対象となる空間に向けて、所定の位置から照射方向を変えながら、エネルギを照射する照射手段と、照射手段で照射されたエネルギの反射エネルギを2次元的に感知し、対象となる空間を2次元的に撮像する撮像手段と、撮像手段で撮像した撮像画像上の切断曲線の特徴を用いて対象物の認識を行う認識手段とを備える対象物認識システムおよび該システムを備える見守りシステム、監視システム。
(もっと読む)
ウエハの特性決定のための方法とシステム
【課題】ウエハの特性を決定するための方法とシステムを提供する。
【解決手段】検査システム16を用い、ウエハからの光に対応する出力を生成することを含む。出力は、ウエハ上の欠陥に対応する第一出力と、欠陥に対応しない第二出力とを含む。また本方法は、第二出力を用い、ウエハの特性を決定することを含む。一つのシステム16は、ウエハに光を当て、ウエハからの光に対応する出力を生成するように設定された検査サブシステムを備える。出力は、欠陥に対応する第一出力と、欠陥に対応しない第二出力を含む。また本システムは、第二出力を用い、ウエハの特性を決定するように設定されたプロセッサを備える。
(もっと読む)
面積計測装置および面積計測方法
【課題】 基準面に載った流動体が占める面積を測定する技術を提供する。
【解決手段】 流動体(20)が広がった所定の基準面(10)および前記流動体(20)の境目に対してポイント照射光を照射する照射ポインタ(70)と、 その照射ポインタ(70)によって照射される前記基準面(10)および前記流動体(20)の境目を連続撮影する連続撮影用カメラ(48)と、 その連続撮影用カメラ(48)の撮影領域に入るように固定された面積算出の基準となる面積基準体(80)と、 前記の連続撮影用カメラ(48)にて連続撮影された画像データにおける前記の面積基準体(80)および前記のポイント照射光がなぞった軌跡にて囲われた流動体(20)の面積を算出する面積算出手段と、を備える。 前記の照射ポインタ(70)が照射するポイント照射光は、前記の流動体(20)および前記の基準面(10)と明確に区別可能な色彩とする。
(もっと読む)
欠陥分類装置
【課題】
本発明は集積回路、磁気ヘッド、磁気ディスク、太陽電池、光モジュール、発光ダイオード、液晶表示パネルなど基板上に発生した欠陥や異物の画像を撮像し、欠陥や異物を種類ごとに分類する欠陥分類装置において、撮像した画像に写っている欠陥の重要度を定量的に計算し、重要度の高い欠陥が写っている画像だけをデータベースに保存することで、ネットワーク負荷やデータベース負荷を低減する。
【解決手段】
本発明は、欠陥座標データを入力し、画像撮像プログラム501にて画像を撮像し、特徴量抽出プログラム502にて撮像した画像から欠陥の特徴量を抽出し、欠陥分類プログラム503にて欠陥を種類別に分類し、重要度予測プログラム504にて欠陥毎に重要度を計算し、画像選別プログラム506にて重要度に基づいて画像をデータベースに伝送するか否かを判定する。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】単純な形状に限らず認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づいて、認識対象物または3次元モデルを対称的に配置した2つの姿勢候補を示す姿勢候補情報を生成する姿勢候補情報生成部234と、認識対象物の姿勢候補情報と3次元モデル情報とに基づいて、または、認識対象情報と3次元モデルの姿勢候補情報とに基づいて認識対象物の位置および姿勢を特定する認識対象物特定部236とを備える。
(もっと読む)
共焦点顕微鏡システム、画像処理方法および画像処理プログラム
【課題】観察対象物の表面の断面曲線を正確でかつ高速に検出することが可能な共焦点顕微鏡システム、画像処理方法および画像処理プログラムを提供する。
【解決手段】使用者が観察対象物Sの断面曲線データの取得範囲を指示する。CPU210は、その指示に基づいてX方向に沿って連続的に並ぶ複数の帯状領域を設定するとともに、各帯状領域においてX方向に平行な複数の測定ライン上でレーザ光を走査することにより、複数の測定ラインに基づく画素データを制御部300から取得する。CPU210は、取得した複数の測定ラインの画素データに基づいて帯状領域の複数の断面曲線データを生成し、作業用メモリ230に記憶する。CPU210は、複数の帯状領域の複数の測定ラインについて生成された断面曲線データをX方向に沿って連続する測定ラインごとに連結することにより、連結された複数の断面曲線データを得る。
(もっと読む)
欠陥検査方法および欠陥検査装置
【課題】
従来技術によれば,試料に熱ダメージを与えることなく,短時間で高感度に欠陥検出・寸法算出することが困難であった。
【解決手段】
被検査対象物である試料の表面の領域を所定の照明条件にて照明する照明工程と、該試料を並進および回転させる試料走査工程と、該試料の照明領域から複数の方向に散乱する複数の散乱光のそれぞれを、前記試料走査工程における走査方向および該走査方向と概略直交する方向の各々について複数画素に分割して検出する散乱光検出工程と、前記散乱光検出工程において検出された複数の散乱光のそれぞれについて、該試料の概略同一領域から概略同一方向に散乱した散乱光を加算処理し、該加算処理した散乱光に基づき欠陥の有無を判定し、該判定された欠陥に対応する複数の散乱光のうち少なくとも一の散乱光を用いて該判定された欠陥の寸法を算出する処理工程と、を備える欠陥検査方法である。
(もっと読む)
1 - 20 / 149
[ Back to top ]